用于偏振成像系统的20mm~200mm变焦物镜设计
2022-11-03 14:05甄胜来陶善静俞本立
应用光学 2022年5期
陈 鑫,甄胜来,方 健,陶善静,俞本立
(1.安徽大学 信息材料与智能感知安徽省实验室,安徽 合肥 230601;2.安徽大学 光电信息获取与控制教育部重点实验室,安徽 合肥 230601)
引言
偏振成像技术可以获取不同目标在不同波段下的偏振信息[1]。偏振成像技术在环境[2]、农业[3]、生物[4]、医学[5]、军事[6-7]等领域应用广泛。偏振成像系统就是利用偏振成像技术实现目标图像重构,变焦物镜作为偏振成像系统的前置光学装置承担获取目标光信息的关键任务,因此偏振成像光学系统的设计非常重要[8]。本文需要设计的偏振成像系统工作在短波红外波段,市面上短波红外变焦镜头较少且价格较为昂贵,一个重要原因就是变焦物镜普遍使用较多非球面,大多变焦镜头镜片数量大于9 片,导致加工和装配成本较高。因此,在满足像质要求的前提下,不使用非球面,减少镜片数量,降低加工和装配成本,对变焦系统的发展具有深远的影响。
2006年,Hiroshi Sato 采用塑料透镜元件设计了数码相机变焦镜头,降低了镜片的加工成本[9]。2011年,王海燕等采用光学塑料非球面透镜与标准玻璃球面透镜混合结构,设计了低成本高变倍手机变焦摄像镜头[10]。2018年,白冰虎等人全部使用球面透镜设计了一款焦距为100 mm~600 mm的变焦镜头,满足了应用需求[11]。2019年,彭台然等利用一种结构简单、成本低廉的可变形透镜实现了低阶像差的校正[12]。文献[9]和[10]利用光学塑料制成的镜片虽然加工成本较低,但却对温度敏感,温度变化较大时,会严重影响镜头成像质量,对于工作在红外波段的物镜,由于红外光的热效应,同样不适用,因此,大大限制了变焦镜头的广泛应用。文献[11]设计的变焦物镜虽然全部使用球面透镜,但整个系统较为复杂,装配误差较大。文献[12] 提出了一种低成本的透镜结构,但却只实现了低阶像差的校正,对高阶像差的校正并未提及。本文在使用7 片球面透镜的情况下,设计的变焦物镜达到了像质要求,同时降低了加工成本。
1 变焦物镜设计
1.1 设计参数及要求
偏振成像系统选用0.847 cm(1/3 英寸)CMOS(互补金属氧化物半导体)芯片,其靶面尺寸为4.8 mm×3.6 mm,像元尺寸为4.2 μm。根据CMOS 芯片的靶面尺寸可得到变焦物镜的焦距为

式中:f′为 物镜焦距;R为工作距离,取7 m~70 m;h为靶面高,取3.6 mm;a为目标高度,取1.2 m。视场满足公式:

式中:θ为全视场角;l为COMS 芯片对角线长度。芯片的空间截止频率满足奈奎斯特采样定理,即:

式中:lP为 CMOS 芯片空间截止频率;d为CMOS芯片像元尺寸。
偏振成像系统集成有主动照明系统,其工作波长为940 nm,为了实现较远工作距离和短波红外成像,系统设计参数指标如表1所示。
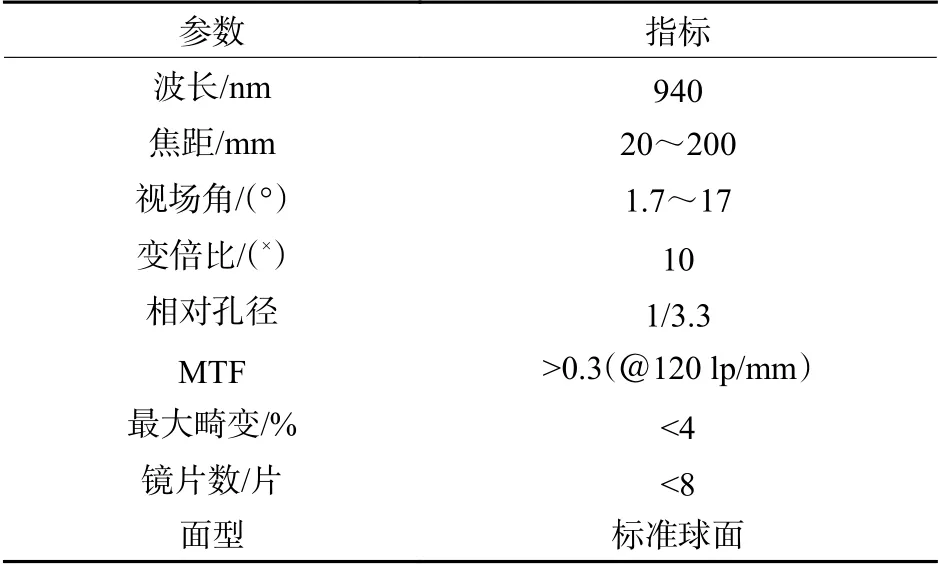
表1 系统设计参数和指标Table 1 Parameters and indexes of system design
1.2 设计理论
采用机械补偿的正组补偿形式,即补偿组光焦度为正[13]。正组补偿能够实现较大变倍比,且像面移动小[14]。正组补偿系统如图1所示。图1 中 φ1为前固定组,在变焦过程中保持固定;φ2为变倍组,在变焦过程中运动,可改变系统的焦距;φ3为补偿组,在变焦过程中随变倍组同步运动,以保持像面稳定;φ4为后固定组,在变焦过程中保持稳定;补偿组φ3与 后固定组 φ4之间为光阑。

图1 正组补偿系统Fig.1 Four-component mechanical compensation zoom system

式中:m2L和m3L分别为长焦时变倍组和补偿组的倍率;和移动q2时,变倍组倍率m2为分别为变倍组和补偿组的焦距。变倍组

以长焦为初始位置,变焦系统变焦方程的解为

将(6)式整理成补偿组 φ3的倍率m3的方程:

式中,系数b可表示为

补偿组 φ3的倍率m31和m32为
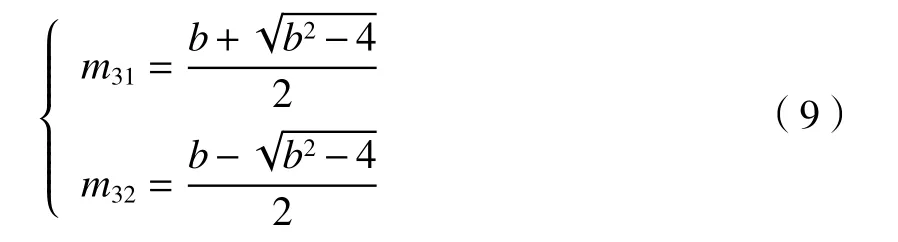
由(9)式可得补偿组的移动量 Δ1和 Δ2为

因此,可求得系统的总变焦比 Γ1和 Γ2为
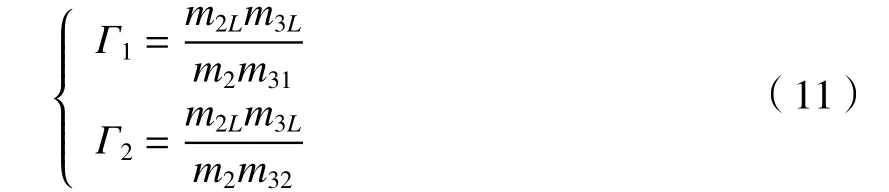

式中m2S为短焦时变倍组倍率。变倍组 φ2每移动q2,变倍组和补偿组同步移动,可得需要的总变焦比Γ1和 Γ2[15]。
当d23L=0.6 mm 时,高斯解有解条件为[16]

1.3 设计过程
根据变焦系统理论对系统的主要参数进行计算,以长焦为初始结构,求得如表2所示,记录了13 组归一化高斯解数据。
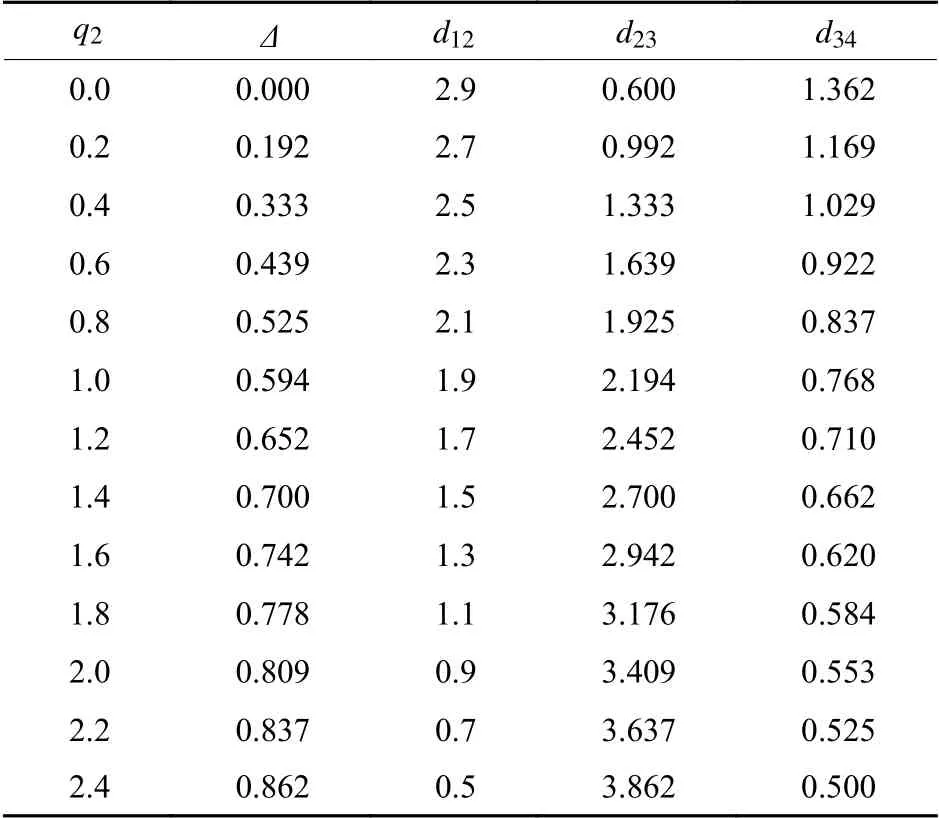
表2 归一化高斯解Table 2 Normalized Gaussian solution
利用求得的高斯解,根据Zemax 建立合适的初始结构[17]。设将变焦系统分为4 个组态,有效焦距f′分别为20 mm、33 mm、66 mm、200 mm,系统相对孔径保持不变。利用APER 操作数设置4 个组态下的入瞳直径,因为偏振成像系统的CCD 相机传感器尺寸为0.847 cm(1/3 英寸),利用YFIE 操作数设置不同组态下的视场。4 个组态的入瞳直径和视场情况如表3所示。
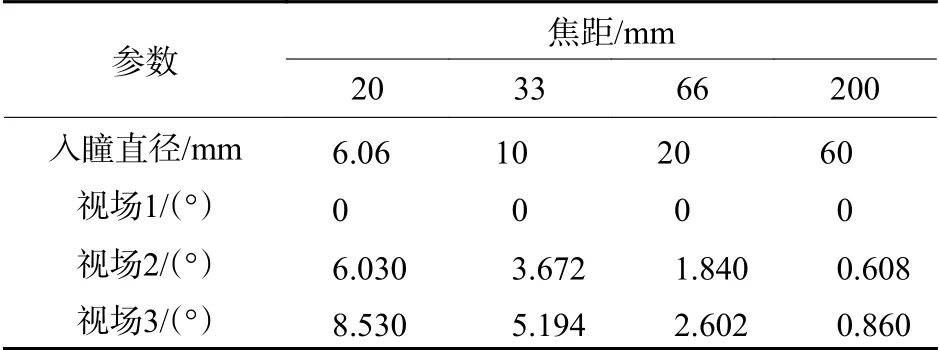
表3 4 个组态入瞳直径和视场Table 3 Entrance pupil diameter and field of view of four configurations
对变焦系统像差进行优化。首先利用ZEMAX建立默认评价函数,添加CONF 和EFFL 操作数控制各个组态的有效焦距,添加DIMX 操作数控制每个组态的最大畸变小于4%。为了得到较少的透镜数,应先分配每组一片透镜进行优化,如达不到像质要求,可根据赛德尔图观察影响系统像差最大的透镜,逐渐增加透镜进行再次优化,直到满足像质要求。优化过程中不加入非球面,利用TOTR操作数控制各个组态下系统总长,使其相等。最终优化结果如图3所示。
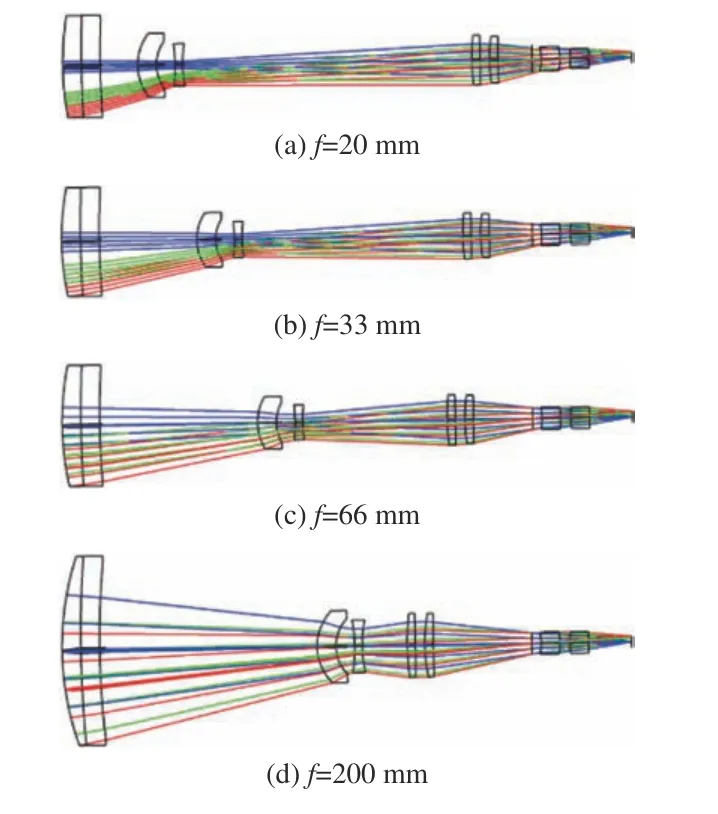
图3 变焦系统结构图Fig.3 Structure diagram of zoom system
1.4 设计结果及像质评价
变焦系统经过像质优化后得到了长焦结构的透镜数据,如表4所示。系统仅使用了7 片透镜,且所有透镜表面均为标准球面。
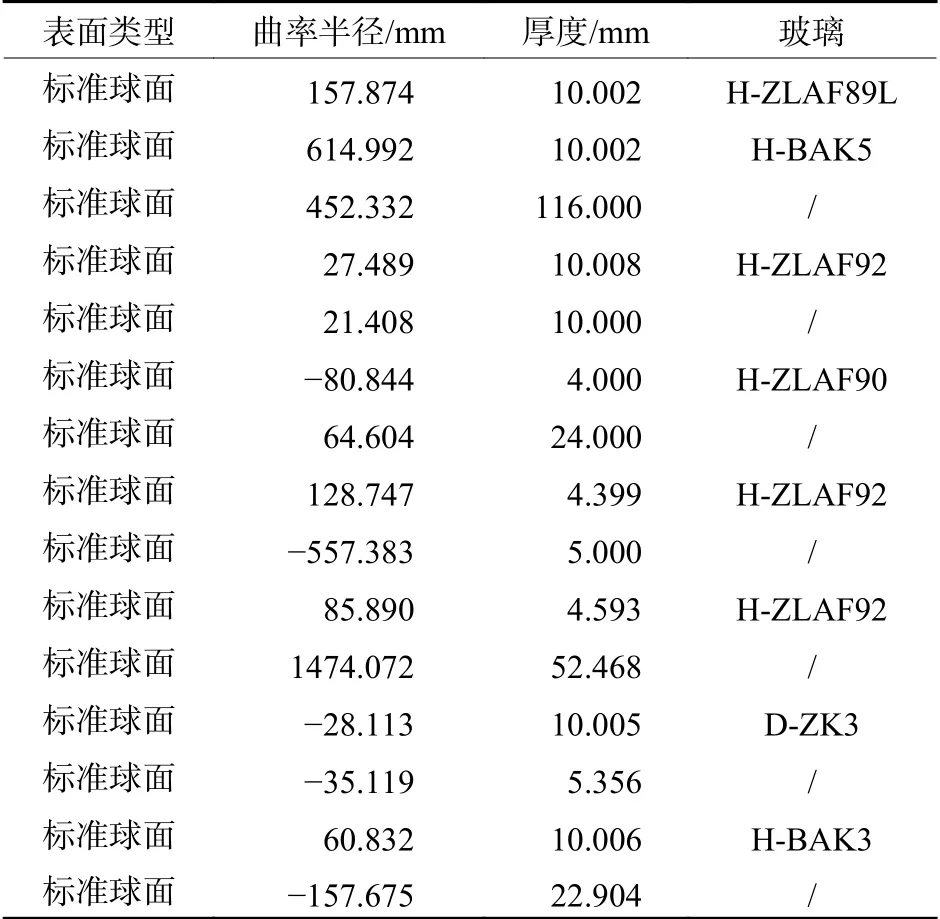
表4 长焦结构透镜数据Table 4 Lens data of long focal structure
调制传递函数(MTF)是光学系统的像质评价标准之一[18],变焦系统MTF 曲线如图4所示。由图4 可以看出,各个组态在120 lp·mm-1处MTF 值均大于0.3,满足指标要求。
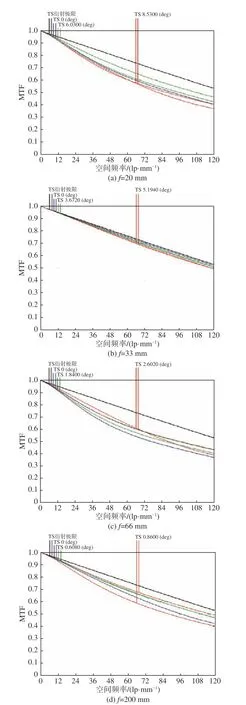
图4 系统MTF 曲线Fig.4 MTF curves of system
系统4 个组态下的场曲和畸变如图5所示。由图5 可看出,系统所有组态场曲均小于0.1 mm,最大畸变均小于4%,满足偏振成像系统的要求。
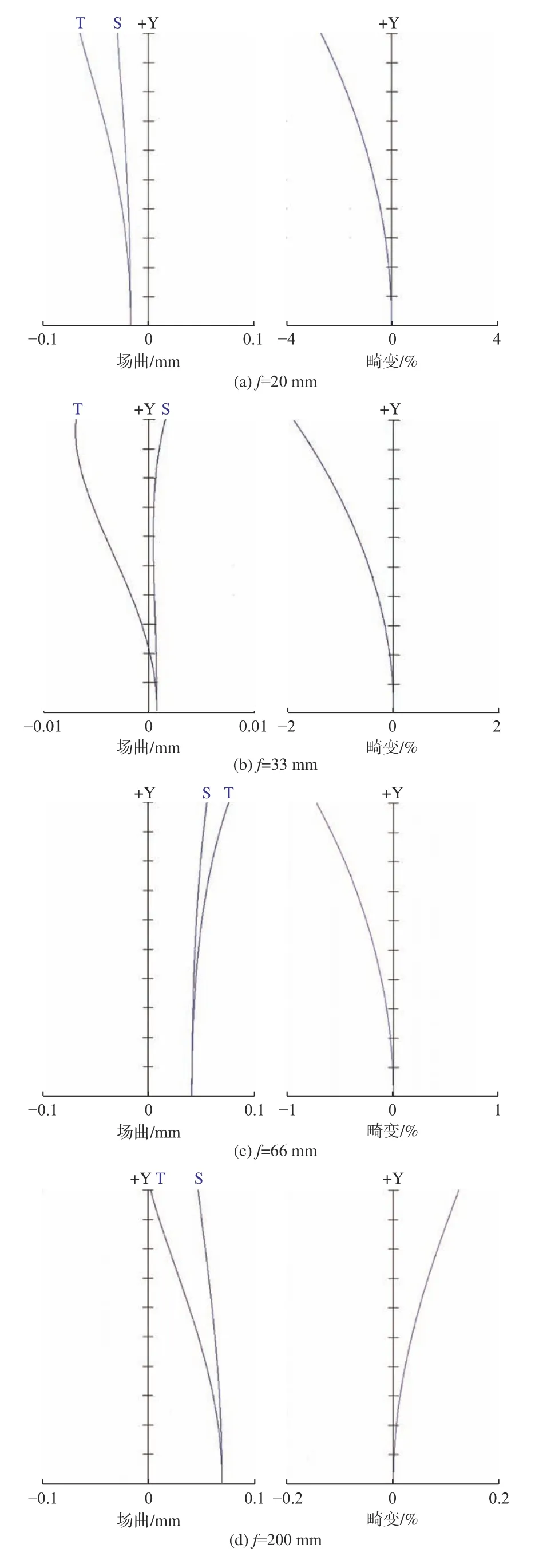
图5 场曲和畸变Fig.5 Curvature of field and distortion
2 凸轮曲线
在变焦系统中,为了使系统在各个焦距下像面不发生漂移并保持稳定,必须使每个组元的位置有严格的对应关系[19]。凸轮曲线可以描述变倍组与补偿组的运动方式[20],利用表2 的13 组高斯解,即可拟合出系统凸轮曲线,如图6所示。图6中x和y分别表示变焦过程中补偿组与变倍组的位置,变倍组做直线运动,补偿组做曲线运动,凸轮曲线平滑无断点。
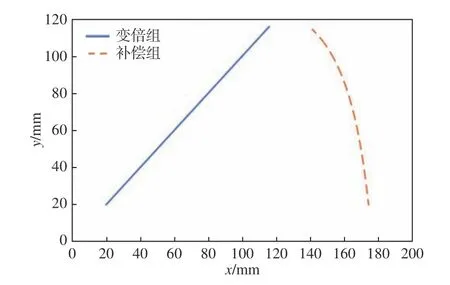
图6 凸轮曲线Fig.6 Cam curve
3 公差分析
在Zemax 中优化光学系统后,其像质评价指标只是达到设计指标理论值,但在实际加工过程中,影响整个系统性能的因素有多方面,比如各个元件之间的间隔、空气间隔、玻璃材料厚度、材料的折射率系数、阿贝数、偏心、倾斜参数等。因此需要对设计的光学系统进行公差分析。本文选用灵敏度公差分析模式,以衍射MTF 平均值作为评价函数,进行400 次蒙特卡洛分析[21]。系统公差设置为:镜片表面光圈公差为2、局部光圈为0.5、镜片或空气中心厚度公差为±0.02 mm、透镜表面中心倾斜公差为±0.025°、透镜装调公差为±0.025 mm、透镜折射率偏差为0.002、透镜阿贝数偏差为1%。公差分析结果如表5所示。由表5 可看出,系统在该公差范围内像质较高,设置的公差范围符合透镜加工和系统装调工艺。
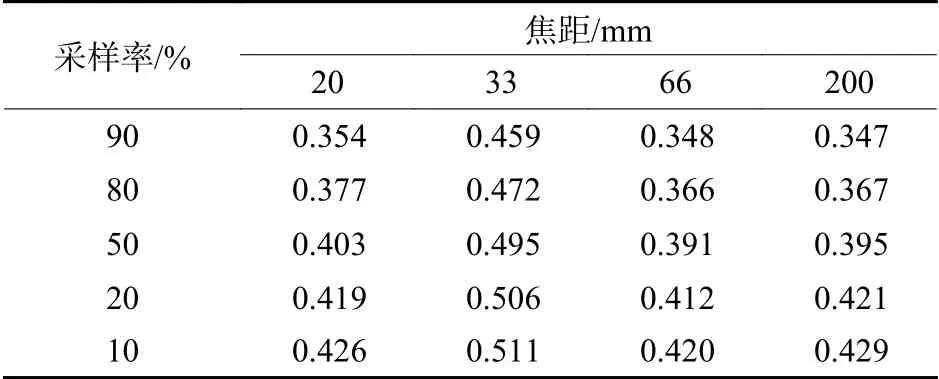
表5 公差分析结果Table 5 Tolerance analysis results
4 结论
设计了一款用于偏振成像系统的20 mm~200 mm短波红外变焦物镜,系统仅用7 片球面透镜实现了10×的较高变倍比,全视场MTF 值均大于0.3,畸变小于4%,达到像质要求,同时降低了系统加工成本,系统最终质量为650 g,长度为280 mm,系统凸轮曲线平滑无断点,公差设置范围符合元件加工和系统装调工艺。设计结果表明,该设计方法对于降低偏振成像系统成本有一定的实用价值。
猜你喜欢
桂林电子科技大学学报(2022年3期)2022-10-26
聊城大学学报(自然科学版)(2022年4期)2022-08-22
成都信息工程大学学报(2022年2期)2022-06-14
汽车实用技术(2022年7期)2022-04-20
国际太空(2022年1期)2022-03-09
中学生数理化(高中版.高考数学)(2019年10期)2019-11-08
电子制作(2019年12期)2019-07-16
中学生数理化·八年级物理人教版(2015年11期)2015-11-30
科学中国人(2015年8期)2015-07-14
光学仪器(2014年1期)2014-03-18