基于无靶标图像的轨道交通隧道内积水检测技术
2022-11-05 12:26李明洪刘宏
铁道建筑 2022年10期
李明洪 刘宏
厦门轨道建设发展集团有限公司,福建 厦门 361000
伴随着我国经济社会不断发展、城镇化集群进程不断加快,地铁交通以其便捷性、准时性、运输量大、安全可靠、低耗环保等特点,在我国公共交通运输中占据着越来越重要的地位。伴随着轨道交通运输线路的快速扩张,各类安全事故时有发生。近年因强降雨、地质因素等引发的渗漏水导致的隧道积水事故频发。特别是2021年7月河南郑州的一场特大暴雨,再次突显了城市轨道交通发生严重积水的危害性和城市防汛设施建设的重要性,也对轨道交通积水监测系统的实时性和主动性提出了更高要求。
基于无靶标图像的积水检测技术已比较成熟,广泛应用于道路、机器人避障等场景,如常规道路积水检测、机器人野外积水检测、管道淤堵积水检测[1-4]等。但在城市轨道交通中,由于积水无明显识别特征,大多数基于无靶标图像的积水检测系统识别准确性较差,问题在于观测范围较小,区域特征不明显。在没有扩大监测范围及增强区域特征的情况下,通常的解决方案是增加靶标来提高系统的可靠性,通过对靶标的状态识别来检测某区段的积水,属于单点式检测[5]。因需设置靶标,再加上识别范围窄,所以这种方法仅适用于重点小区段的积水检测,无法大规模应用。考虑地铁隧道的实际环境,结合厦门地铁安全自动巡检系统的部署,本文介绍一种可大规模应用于轨道交通的基于无靶标图像的积水检测技术。
1 无靶标图像积水检测技术
1.1 视觉原理
光波是在原子运动过程中由电子产生的电磁辐射。而光谱(光学频谱)是复色光经过棱镜、光栅等光学设备分光后,被色散开的单色光按波长(或频率)大小依次排列的图数据。光谱中肉眼可感知的波长在780~400 nm的电磁辐射被称作可见光[6],由红、橙、黄、绿、蓝、靛、紫依次分布的多色光构成。
光谱分辨率在10-2λ(其中λ为波长)数量级范围内的光谱图像称之为高光谱图像[7]。高光谱成像技术是基于大量较高波段光谱区域中窄波段成像数据的叠加技术。该技术是成像技术与光谱技术的结合,对目标空间区域投影成像的同时,对每个三维区域像元经过色散形成多达上百个窄波段光谱以进行连续的光谱覆盖。研究目标的二维几何数据及一维光谱数据,获取高光谱分辨率下连续窄波段图像数据,由此构成的数据也可用三维数据块形象地说明[8]。对于探测目标,不同谱段的影像信息所反映的数据具有一定的差异特征,经过对光谱图像的处理,能准确地获取探测目标的各种识别信息,从而实现有效的物体识别。
本文所述的无靶标图像积水检测系统是基于高波段补光模块对当前视野区段的覆盖,利用高光谱图像捕捉系统采集该区域的光谱图像信息,AI(Artificial Intelligence)算法模块再对图像特征区域进行提取、模型库智能匹配和图像识别,最终实现对积水变化区域的有效监测。
1.2 积水特性
1.2.1 水的光谱特征
水的光谱特征体现在对光谱的吸收、透射和反射特性上,主要是由水自身物理特性决定的,同时也受水的各类状态的影响。对于0.4~2.5μm波段的电磁波吸收特性,相对纯净的自然水体明显强于在该区域下的其他物质。在光谱的可见光波段内,水体中蕴含的多种能量物质相互作用情况较为复杂,通常情况下,水的光谱反射特性主要受三个方面影响:水体表面物质、水体底部区域物质和水体悬浮物质。在对常规水体的研究中,光谱的吸收与透射特性不仅与水体自身的特性有关,而且显著地受到水中各类有机物及无机物的影响[9]。
在光谱的近红外、中红外波段里,水几乎吸收了所有的能量。在近红外波段图像中,相对较纯净的自然水体更趋近于一片“黑体”区域。因此,在这个波段下的较纯净自然水体的反射率非常低,甚至可以忽略。
设备寿命缩短是因为通过“启/停循环”加载/卸载设备使制冷系统输出容量匹配数据中心的制冷需求。在“启/停循环”模式下每启动一次电机,电机绕组将经历一次较大的启动电流,并让电机承受较大的应力,从而缩短电机寿命。由于电机从怠速、加速至全速需要加大转矩,因此电机的启动电流可能高达电机满载电流的10倍。相反,变频器可以具有“软启动功能”,可以让电机缓缓加速至需要的工作速度。它可减小施加到电机上的机械和电气应力,降低维护和维修成本,同时延长电机使用寿命。
相比于纯净的自然水体,浑浊泥沙(泥沙含量>800 mg∕L)在550~750 nm波段内反射率较高(>10%),且反射率随着泥沙含量的增加而提高。当泥沙达到一定浓度时,反射率趋于稳定[10]。
1.2.2 隧道积水特征
轨道交通中的积水常发生在隧道区间,该区段的积水主要由强降雨、施工渗漏水、消防管道泄露等导致,郑州地铁黄河路站积水见图1。积水常含有泥沙,使得水呈现浑浊状态,除水表面镜面反射外,水体悬浮物及底部区域物质也具有一定的反射和吸收作用。利用高波段补光系统覆盖检测区域,可以发现:无积水区域的图像相对明亮,有积水区域的图像会根据不同水质呈现出不同程度的暗斑。隧道中的积水常是较为浑浊的水质,其暗斑程度较浅,图像检测系统可以根据暗斑特征甄别是否存在积水现象。

图1 郑州地铁黄河路站积水
1.3 系统架构
无靶标图像积水检测系统主要包含三个部分:前端光谱图像采集系统、前端高频率补光系统、后台算法处理系统。
1)前端光谱图像采集系统
该系统主要是指高光谱图像信息采集器(图2),核心感光元件采用1∕8英寸Progressive Scan CMOS,最低照度0 Lux with IR,像素3 840×2 160,配置特定可调偏光元件,可分类采集可见光及特定高光谱波段的图像信息。

图2 前端光谱图像采集器
2)前端高频补光系统
轨道交通隧道内常为间距性白光补光,可对水面镜面波动的补光起一定的辅助作用。但由于隧道区间较长,既有补光系统无法满足全区段的积水检测需求,通过追加高频补光系统可有效实现监测区段全域覆盖。辅助高光谱图像采集器,通过被监测物质的反射特征(高光谱特征及镜面灯光反射特征)来实现积水的有效监测。高光谱图像采集器与补光系统均集成于图2所示结构中。
3)后台算法处理系统
后台算法处理系统以X86架构服务器为硬件核心载体,运行光谱图像处理算法。通过前端光谱图像采集设备传输给服务器的数据信息进行积水的光谱特征分析。把特定光谱下的反射数据与基础模型数据进行比对,反映出该区域的明暗变化波动,设定特定的积水特性阈值,反馈特性分析结果,识别出区域积水块。算法处理系统流程见图3。
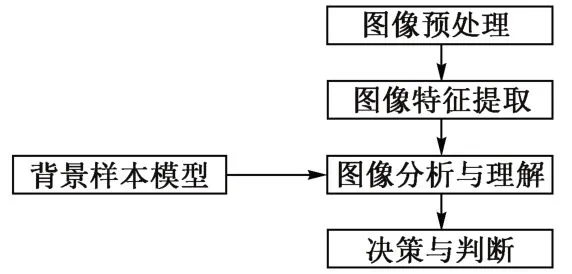
图3 算法处理系统流程
图像预处理包含椒盐噪声、高斯噪声的滤除,图像对比度的增强和形态学处理。由于在特定激光及图像采集系统中的图像积水特性具有与背景样本模型较大的差异化特征,可较为容易提取出无规则的积水特征。
图像分析与理解是建立在背景样本模型及特征提取基础上的,利用积水特征及隧道背景样本的先验条件,改善VIBE(Visual Background Extractor)算法对积水特征的识别性。VIBE算法是一种基于邻域像素统计的图像数据流序列前景的检测算法。由于其仅使用中心像素的8邻域随机值建立样本值,所以大大简化了背景提取流程,可适用于实时检测、运动检测的场景。该算法的基本思想可概括为:背景样本的初始化;像素分类;背景样本模型实时更新。这样可有效减少其他光线特征可能产生的干扰而导致错误的判断。
算法处理系统的核心在于背景模型机制建立、像素分类以及背景模型刷新机制。背景模型机制的建立是为图像中每个像素点建立各自的样本集,即

式中:x为当前帧图像的一个像素点;S(x)为像素点x的样本集合;PN为x的样本值。
像素分类在图像层面上是对图像背景区块的划分,而划分成不同背景区块的依据则是基于2维度的欧式空间,即

式中:SR[pt(x)]为像素值p t(x)的欧式空间集;R为像素点间的欧式距离;Umin为设定的最小欧式距离值。
基于R,把当前像素点x的像素值p t(x)与背景样本集中的样本值进行比较,结果纳入近似样本像素点区域块,以此与Umin判断得出背景像素区域。
背景模型的更新机制解决了因时间推移视频图像的背景发生改变的问题。光照的变化、树叶飘落、相机晃动等都会引起背景发生一定程度的改变。式(3)表明在(t,t+dt)时刻内,背景样本集中的某样本值没有因时间因素而更新,与时间t不相关。这是一种无记忆策略,更有利于背景保真。

式中:P(t,t+dt)为时间变化下的样本值函数,n为图像序列值,t为时间。
2 系统测试
无靶标图像积水检测系统已在厦门轨道交通1号线试车线开展技术验证工作。通过在隧道处搭建一段长约6 m、宽约2 m的水床模拟实际积水环境。当水面有波动而产生光影时视觉覆盖区域受补光系统投射的影响,实时采集的光谱图像产生明暗变化的区域。现场识别效果见图4。
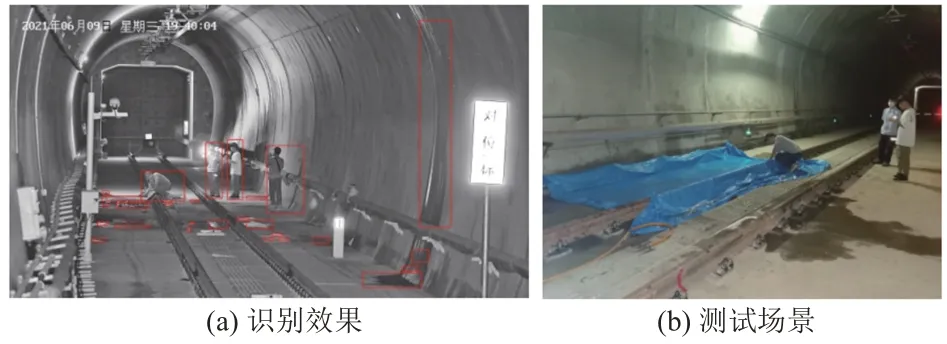
图4 现场识别效果
系统测试相机按照15 fps帧率进行数据采集。该套系统全线部署,每个单目视野覆盖25 m,测试距离按照10、20、30 m等距进行。受进入轨行区测试时间限制,三次(6月6日、6月9日和6月11日)进入轨行区现场,每个距离下分别按照20、30、20 min进行测试,所对应的理论测试帧数总数应为18 000、27 000、18 000帧。为方便统计,按每分钟等间隔提取15帧图像统计参数。不满1 min的图像帧数按1 min内等间隔时长提取并纳入统计数据,积水识别测试结果见表1、图5。
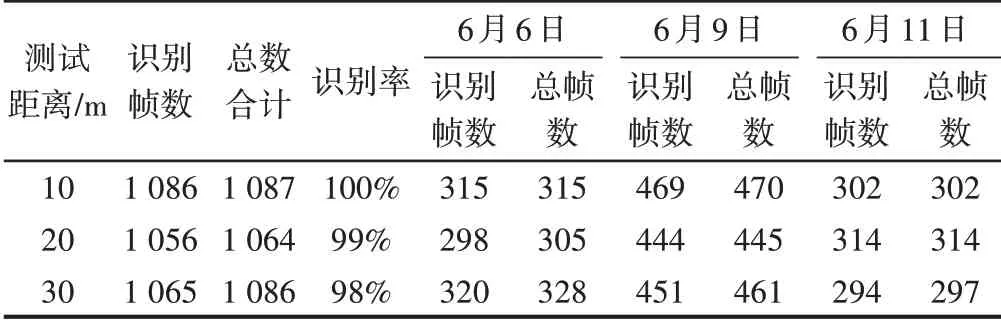
表1 积水识别测试结果
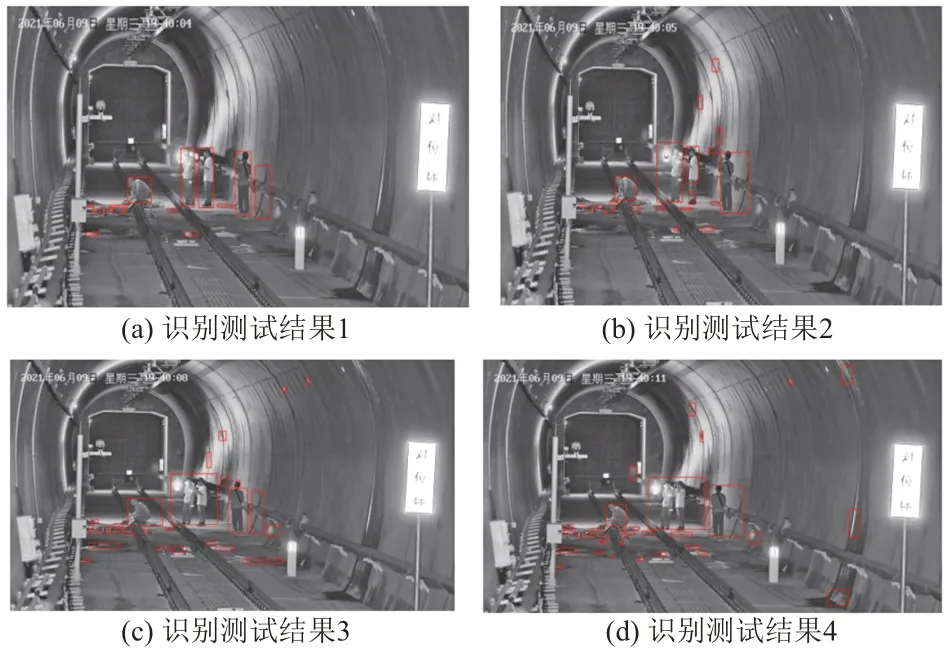
图5 系统实测部分识别帧
由表1、图5可知,无靶标图像积水检测系统有效识别了积水区域的变化情况,但该系统无法判断积水的深浅,只可判断积水的有无。因此,在隧道区间部署该系统的同时,可以根据区间坡度,在低洼处设置水位标识以辅助观测积水的深浅。此外,该系统通过对运动下的人在高光谱区域内的特征识别,可在视野及补光系统覆盖的区域对人物进行入侵监测。
3 结语
本文针对在轨道交通行业中因施工作业导致的渗漏水、强降雨等产生的轨行区积水,介绍了一种应用于轨行区积水的自主检测的光谱视觉系统,可全方位对轨行区积水特征进行识别分析。以厦门轨道交通1号线试车线隧道区段为测试地点,对该系统进行了验证。该系统在一定条件下对隧道轨行区积水具有良好的识别效果,不仅能有效监测轨行区积水状态,还可报警以便人工进行远程二次复核,降低因发现不及时导致积水过深带来的安全隐患。同时,实现了对目标区段监控盲区的覆盖。该系统具有较大的功能延展性,可对违规进入轨行区的人员进行实时监控,辅助保障列车行车安全,具有较高的实用价值。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
中国生殖健康(2020年2期)2021-01-18
小太阳画报(2019年11期)2019-12-06
电子制作(2019年19期)2019-11-23
世界农药(2019年3期)2019-09-10
今日农业(2019年16期)2019-01-03
中国生殖健康(2018年2期)2018-11-06
中国交通信息化(2017年8期)2017-06-06
光学精密工程(2016年4期)2016-11-07
现代农业(2016年6期)2016-02-28