
基于改进磁链估计法的PMSM无位置传感器控制*
2022-11-05 10:52郭云珺马思源
舰船电子工程 2022年9期
郭云珺 马思源 余 翔
(海军工程大学军用电气科学与技术研究所 武汉 430033)
1 引言
近些年来,随着永磁体材料相关技术的发展逐渐步入成熟,永磁同步电机也因其优越的性能逐渐进入人们的视野。永磁同步电机的可靠、稳定运行离不开转子准确的位置信息和速度信息,而传统的在转子轴上安装机械式传感器的获取转子信息的方法实现简单,数据准确,但存在着可靠性低、使用条件受限制、抗干扰能力差、成本高等缺点。为提高电机运行的可靠性,研究人员提出了无位置传感器控制技术,免去了容易出故障的机械式传感器,提高了电机控制的可靠性和稳定性。无位置传感器控制控制方法具体来讲就是指利用电机绕组的电流、电压等信号,通过适当的计算方法,代替传统的机械式传感器,估计出转子的速度和位置信息,从而实现电机的稳定控制[1]。要实现电机的无位置传感器控制,关键在于对转子速度和位置的估算方法。
目前,针对永磁同步电机的无位置传感器控制策略的研究已成为当前电机控制领域的热门研究方向,海内外众多学者对此展开了多种多样的研究,无位置传感器控制技术也越来越趋近于成熟[2~3]。
磁链估计法因其算法简单、易于实现、动态响应快等优势成为目前永磁同步电机无位置传感器控制策略中应用最为广泛的一种算法[4~7]。磁链估计法的基本原理是利用了旋转磁场理论和电机的数学模型。磁链是包含了电流和电机转子位置信息的函数,因此想要得到电机的转子位置和转速信息,可以通过测量电机的电流电压的方法,首先计算出转子磁链矢量,再通过对转子磁链进行计算处理,提取出转子的位置和转速信息[8]。但依赖于电机参数,温度等外界因素容易影响磁链法估计结果的准确性。传统的磁链估计法普遍存在积分直流偏置问题和准确估算转子位置问题[9],为了提高辨识精度,需要对磁链估计法提出一些改进措施。
本文在当前研究基础上,提出了一种基于二阶高通滤波器的磁链估计法改进,用二阶高通滤波器消除直流偏置,并采用二型锁相环降低系统的稳态误差。最后,通过仿真对改进后的方法进行可行性和有效性验证。
2 磁链估计法
目前,永磁同步电机的中高速区辨识算法中,磁链估计法的应用最为广泛、技术最为成熟,在中高速时对转子位置和转速的估计准确度最高[10]。但传统的磁链估计法普遍存在积分直流偏置问题和准确估算转子位置问题,为了提高辨识精度,需要对磁链估计法提出一些改进措施。
2.1 传统磁链估计法
磁链估计法的基本思想就是把两相静止坐标系下转子永磁体产生的磁链估计出来,然后通过三角函数运算或锁相环等方法求解出电角度θ。
本文研究的表贴式永磁同步电机属于隐极电机,Ld≈Lq,在两相静止坐标系中,永磁同步电机的定子磁链、定子电流及转子永磁体磁链的关系可表示为

其中,Ψf为永磁磁链峰值。
首先求解出Ψrα、Ψrβ:

通过三角函数运算求解电角度的方法是,由反正切函数求解出θ的估计值θest:

然后对θest进行微分,即可得到转速估计值ωest:

传统磁链估计法中,三角函数法会将噪声放大,存在较大误差,可采用锁相环方法获得转子位置和速度[11]。
2.2 改进型磁链估计法
用直接积分法获得转子磁链估计值有以下缺点:1)定子绕组磁链初始值难以确定;2)电压、电流测量值存在直流偏置时会导致积分值逐渐偏移真实值。
定子磁链可由下式表示:
从以上表达式可以看出,定子磁链为相差90°的正弦量,不存在直流偏置。因此,需要设法消除积分项带来的偏置,且使得算法不依赖于定子绕组磁链初始值。常用的消除直流偏置的方法为一阶高通滤波法。
1)一阶高通滤波法
偏置量可看作频率为零或很低的交流量,可以采用高通滤波器滤除。常用的一阶高通滤波器传递函数为

其中,ωc为截止频率。
高通滤波器会导致幅值衰减,衰减比例为

高通滤波器会造成滤波后的波形相位超前,超前的相位角为:

积分单元1/s与高通滤波单元s/(s+ωc)合并为一个带幅值衰减的低通滤波模块1/(s+ωc)。根据转速指令,实时算出幅值补偿系数,与低通滤波后的值相乘,将幅值还原。计算得到的转子磁链Ψrα、Ψrβ经过归一化得到只含位置角的正弦和余弦函数。归一化的具体算法如下:
位置角的求解采用锁相环算法进行[11~12]。
2)二阶高通滤波法
一阶高通滤波法适合于直流偏置较小的情况,如果直流偏置较大,可能存在滤波后的磁链仍有一定的直流分量的情况。
为有效消除该偏置,本文提出采用二阶高通滤波法对定子磁链进行滤波。二阶高通滤波器用两个相同的一阶高通滤波器串联而成,其传递函数为
其中,ωc为一阶高通滤波器的截止频率。
幅值衰减比例为

相位超前角度为
二阶高通滤波器的截止频率为

二阶高通滤波法较一阶高通滤波器算法更复杂,但可应用于电压传感器、电流传感器由于未校准或出现故障等原因存在直流偏置的情况,因此具有更高的可靠性。
3 仿真与分析
3.1 高通滤波器消除磁链偏置的效果
图1为有偏置的磁链与一阶高通滤波后的磁链对比仿真曲线。滤波截止频率为50Hz,磁链频率为75Hz,峰值为0.01Wb,初始偏置为0.01Wb,电压含有直流偏置量,大小为0.3V。如图2所示,经过一阶高通滤波后,磁链的偏置没有完全被消除,偏置量大小为0.001Wb。
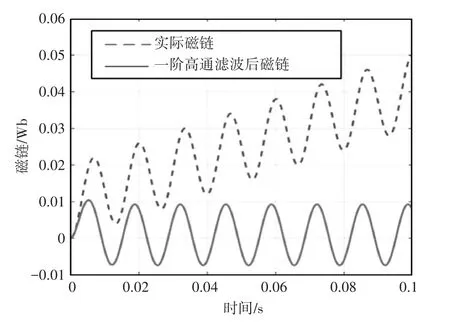
图1 磁链(增大直流偏置)经过一阶高通滤波器的效果
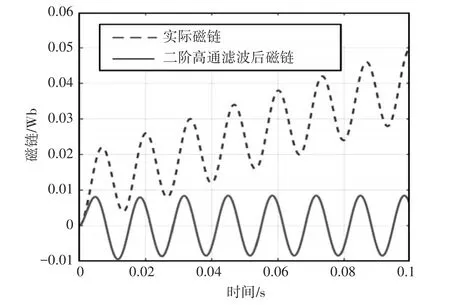
图2 磁链(增大直流偏置)经过二阶高通滤波器的效果
图2为有偏置的磁链与二阶高通滤波后的磁链对比仿真曲线。如图所示,经过二阶高通滤波后,基本消除了直流偏置,且消除的速度比一阶高通滤波快。说明二阶高通滤波的效果较好。
设置二阶高通滤波器和一阶高通滤波器的截止频率均为50Hz,绘制出如图3所示的Bode图。由图3可见,在低频处,二阶高通滤波带来的幅值衰减更大,对低频信号的滤除效果更好。需要注意的是,二阶高通滤波器同样会带来幅值衰减和相位超前问题,且二阶高通滤波造成的相位超前更大,需要在锁相环算法中加入相位补偿。
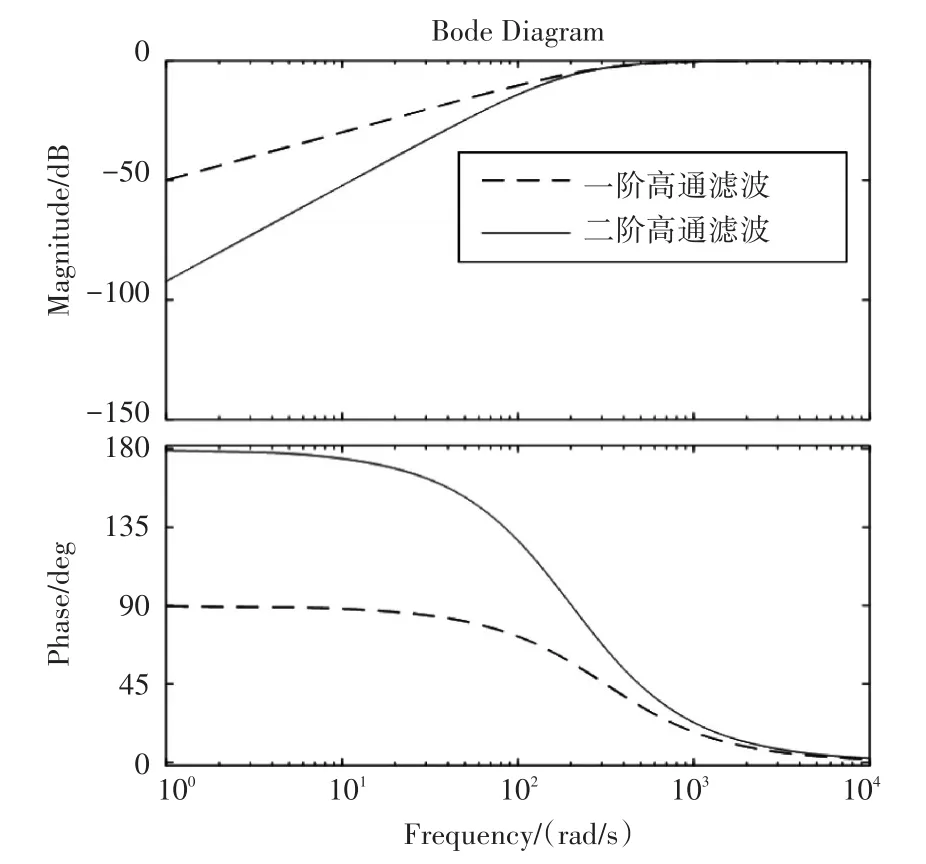
图3 二阶高通滤波器和一阶高通滤波器的Bode图
3.2 电机全转速范围内控制效果
本文所用电机控制器的控制对象为某型旋翼电机(包含螺旋桨),电机的具体参数如表1所示。
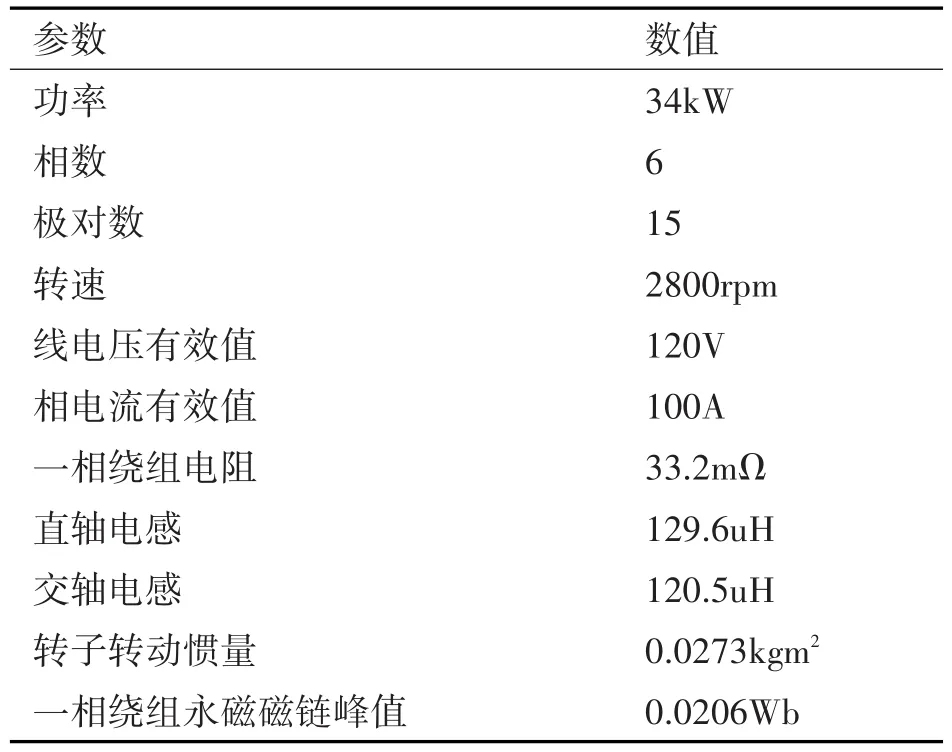
表1 电机参数
为验证本文所提出的优化算法的可行性,搭建仿真模型并对传统磁链估计法与改进后的算法分别进行仿真分析。
开环拖动采用I/F控制方法,在转速达到300rpm时切换至磁链估计法。为保持稳定控制,I/F控制时给定的转速上升斜率为200rpm/s,磁链估计法中给定的转速上升斜率为1200rpm/s,锁相环的参数设置为kp_PLL=70.7,ki_PLL=2500.0。
全转速范围转速仿真曲线如图4所示。图中可看出,在经过一段时间后,改进前后的控制方法下的实际转速均能稳定跟踪上给定转速,但相比于采用一阶高通滤波器的方法,采用二阶高通滤波器的方法,其转速上升曲线更贴近给定转速,可以更快速地到达给定转速,辨识转速对实际转速的跟踪性能均良好,两者几乎重合。
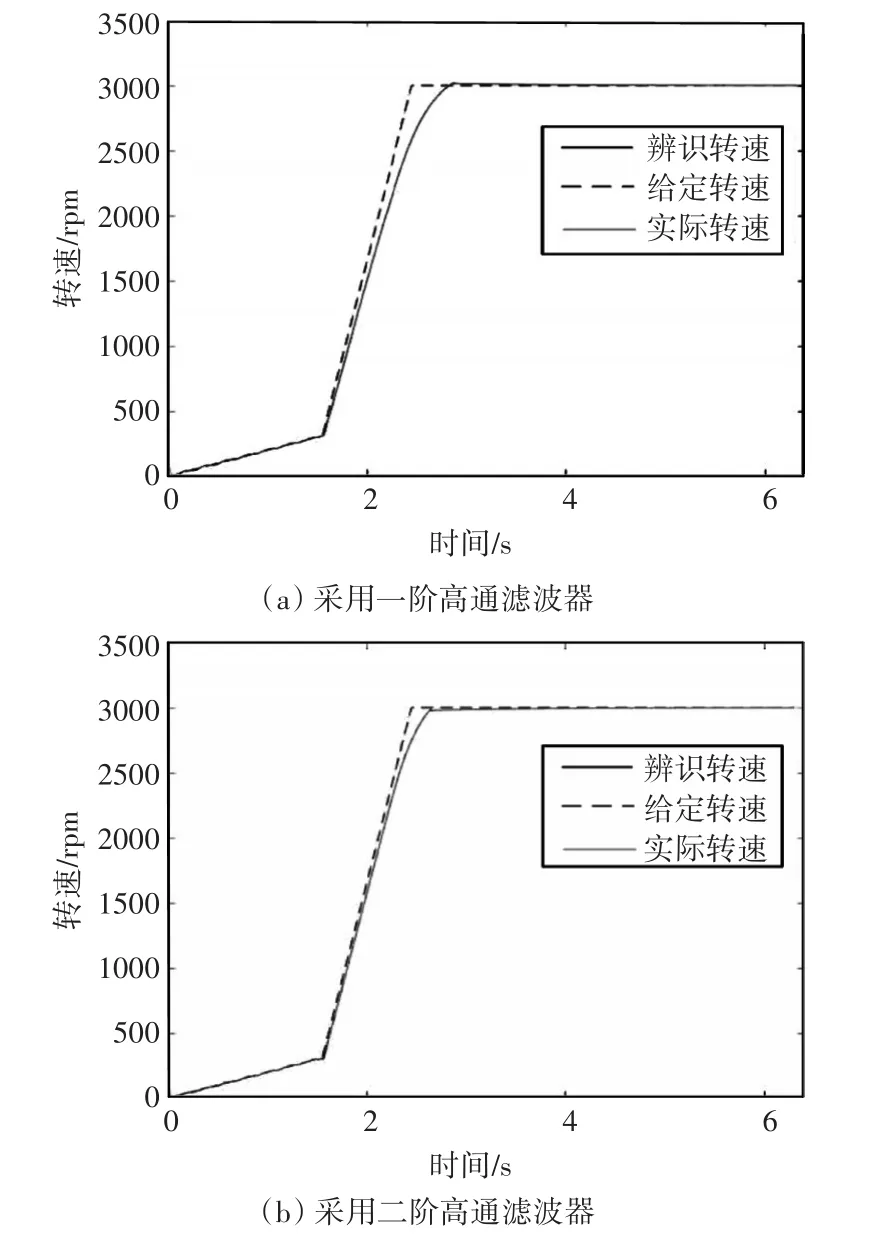
图4 全转速范围转速仿真曲线
图5为给定转速稳定后的辨识转速与实际转速对比曲线,由图5可见,改进前后的两种方法转速辨识误差均约为±0.6rpm,转速辨识精度基本一致。但根据图4结果分析,采用二阶高通滤波器的方法响应速度更快,转速辨识效果更好。
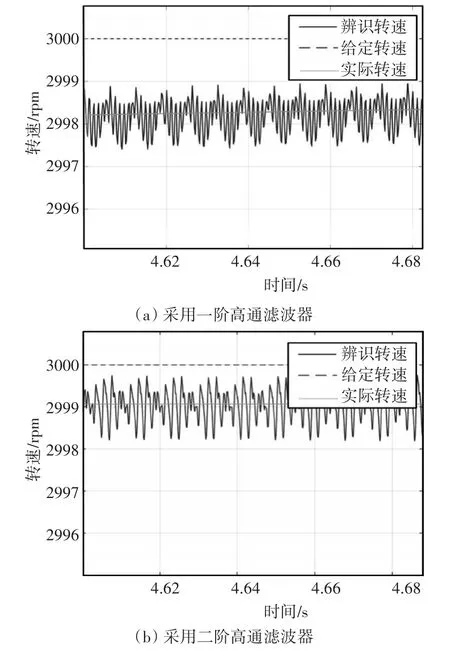
图5 稳定后的辨识转速与实际转速对比曲线
图6为给定转速稳定后的辨识电角度误差对比曲线,由图可见,采用一阶高通滤波器的方法辨识电角度误差约为0.4deg,而采用二阶高通滤波器的方法其辨识电角度误差约为0.18deg,可以看出改进后的方法其电角度辨识误差明显小于优化前的方法,辨识精度更高。
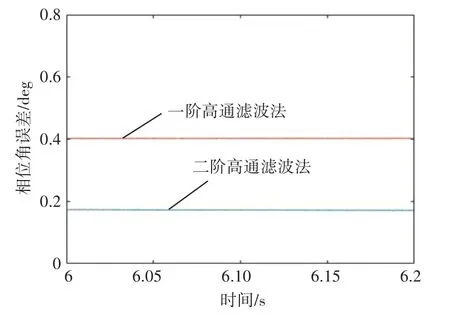
图6 稳定后的辨识电角度误差对比曲线
4 结语
本文首先对基于磁链估计的永磁同步电机无位置传感器控制方法进行了分析;然后针对传统磁链估计法中普遍存在的直流偏置问题和准确估算转子位置问题提出了一种基于二阶高通滤波器的优化策略;最后搭建仿真模型对该优化策略进行验证分析。仿真结果表明:相比于传统磁链估计算法,本文提出的优化算法对于转子速度及位置信息的辨识误差更小,辨识精度更高,且动态响应更快,有效提高了磁链估计法的控制性能,具有一定的实用性,可为更高水平的电机控制器的研制提供技术支撑。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
声学与电子工程(2021年2期)2021-07-26
电子制作(2017年1期)2017-05-17
北京航空航天大学学报(2016年6期)2016-11-16
电测与仪表(2016年15期)2016-04-12
电测与仪表(2016年10期)2016-04-12
燕山大学学报(2015年4期)2015-12-25
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2014年23期)2014-04-04
