基于超声透射特性的密闭容器液位测量与装置设计*
2022-11-12 04:59葛仁望金卫良牟彦春
中国安全生产科学技术 2022年10期
葛仁望,林 正,金卫良,牟彦春,李 青
(1.中国计量大学 机电工程学院,浙江 杭州 310018;2.浙江省特种设备科学研究院,浙江 杭州 310020)
0 引言
近年来,我国的经济实力增长迅速,较大程度上得益于工业的进步与发展。在工业生产与制造过程中会发生大量石油产品、化学制品等基础能源、原料的消耗。同时,能源的储存与运输问题也相应而生。传统的机械测量金属密闭容器内液体液位法由于存在操作危险系数高、测量误差大以及难以实现在线检测功能等缺陷,正在慢慢退出大众视野。
目前普遍使用的液位检测技术分为接触式液位检测技术[1-3]与非接触式液位检测技术[4-7]。考虑本文主要针对密闭容器的液位测量,因此以非接触式测量技术作为液位的检测方法。当前普遍使用的非接触式测量技术包含:视觉检测技术、雷达检测技术、激光检测技术、红外检测技术、放射性检测技术、超声波检测技术[8]等。视觉检测技术与雷达检测技术需要对被测容器进行开孔操作。激光检测方法对容器透光性有要求,无法透过金属容器检测,检测装置成本较高且不易维护。红外检测方法具有响应速度快且测量精度高等优点,但易受被测物体颜色和光线强度干扰。放射性检测方法虽能满足测量条件,但放射性元素不适用于一般工况且对人体有害。超声波检测方法不仅可应用于气体介质液位测量也可应用在液体、固体介质中,实现液位测量,但其受环境温度影响较大,需做温度补偿[9-11]。
在国外,液位测量技术及液位传感器的研究起步较早,液位测量技术和方法多种多样。截至目前,国外一些厂商,如罗斯蒙特、瑞士E+H、德国VEGA、美国Drexelbrook等都已研制出一系列具有自动化、智能化、检测精度高且测量技术完备等特点的液位传感器。相比国外,国内的液位测量技术起步较晚,现阶段许多超高精度的液位装置都源于进口。很多高校、研究院等正与某些生产企业联手研制高精度液位测量装置,国内部分企业和国外技术公司合作生产高质量液位测量装置[12]。就目前情况而言,无论国内还是国外,针对密闭容器液位测量的超声检测装置都比较少,且技术基本保密、装置价格比较昂贵。
针对以上问题,本文利用超声波透射特性[13]作为密闭容器的液位测量原理,通过设定发射波幅值和接收回波放大倍数,实现不同材料、厚度容器内物质的液位测量。在保证容器密封性的前提下,实时测量容器内当前液位及容器倾斜程度并通过显示屏、阿里云端[14]以及上位机显示数据,一定程度上实现人机交互。研究结果可为金属密闭容器内液体液位测量提供一定的参考依据。
1 基于超声透射特性的液位测量检测原理分析
超声波按质点运动的振动方向可以分为纵波、横波、表面波、板波等[15]。其中横波、板波、表面波的传播介质为固体。纵波的传播介质不仅可以为固体,也可以为液体与气体。本文研究对象介质耦合方式为固体与液体或固体与气体,因此本文利用纵波超声波[16]展开研究。
使用超声波换能器发射超声波束时,声轴线上的声压[16]可用式(1)表示:
(1)
式中:P0为超声波换能器初始化声压,Pa;λ为波长,m;D为超声波换能器直径,m;x为轴线上传输点至波源的距离,m。
声轴线上的声压在极大值(2P0)和极小值(0)之间变化。最后1个极大值与超声波换能器之间的距离称为近场长度(N,单位:m),如图1所示。其中近场长度[16]与超声波束的发散角可由式(2)~(3)表示:
(2)
(3)
式中:α为近场长度与超声波束的发散角,(°)。

图1 超声波声场分布Fig.1 Ultrasonic field distribution
根据声学基础知识可知,以入射声波从介质1垂直入射到介质2构成界面,在该界面部分声波被反射形成反射波,反射波沿着与入射波相反的方向在介质中传播;部分声波将透过界面形成透射波,透射波沿着入射波相同的方向在介质中传播,如图2所示。

图2 声波垂直入射到容器表面时的反射与透射Fig.2 Reflection and transmission of acoustic wave perpendicularly incident on vessel surface
当超声波在2种不同介质间传播时,声强的反射系数与透射系数[16]可由式(4)~(5)表示。
(4)
(5)
式中:rI为声强反射系数;tI为声强透射系数;Ii为入射波声强,W/m2;Ir为反射波声强,W/m2;It为透射波声强,W/m2;rp表为声压反射系数;tp为声压透射系数;Z1,Z2为介质1和介质2的声阻抗,Pa·m-2·s-1;ρ为介质密度,kg/m3;c为介质声速,m/s。
如图3所示,在实际测量过程中,超声波探头与被测容器互相耦合时存在3种情况:探头完全处于液位以上、探头介于液位与空气间、探头完全处于液位以下。

图3 发射探头检测时所处状态Fig.3 State of transmitting probe in detection
根据分析,被测容器在3种情况下的声压透射系数[3]可由式(6)表示。
(6)
式中:tp为声压透射系数;tair为容器与空气的透射系数;tliq为容器与被测液体的透射系数;s为发射探头在液位以下面积,m2;y为发射探头底部与液面的相对距离,m。
超声波在介质中传播,存在衰减现象[16],即波束扩散、晶粒散射和介质吸收。随着距离增加,超声波能量逐渐减弱。对于液体介质而言,衰减主要是吸收衰减,衰减方程由式(7)表示:
Px=P0+e-αx
(7)
式中:Px为至波源距离为x处声压,Pa;e为自然常数;α为吸收衰减系数,与温度、介质密度、黏滞系数相关。
2 液位检测系统设计
2.1 超声波探头间距固定装置设计
在密闭容器液位检测过程中,当被测容器体积较大时,为避免探头间距对于测量结果的影响,安装超声波探头间距固定装置尤为重要。在确定超声波探头尺寸后,先根据超声波探头外形设计套件,再根据套件尺寸设计相应等间距固定装置,最后将探头置入固定装置,如图4所示。
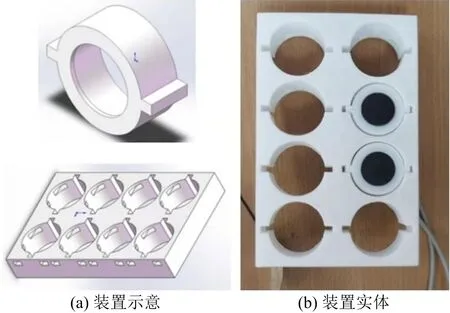
图4 超声探头固定装置Fig.4 Fixing device of ultrasonic probe
2.2 超声波液位检测电路设计
根据超声波原理与测量要求设计电路,液位检测硬件电路主要包含:STM32f103rct6最小系统,电源模块、超声波液位检测模块、HC-SR04超声波测距模块、JY61三轴姿态传感器模块、OLED显示模块、Lora无线传输模块、EC200S物联网传输模块,设计框图如图5所示。
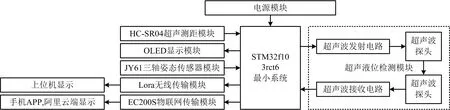
图5 液位检测硬件电路设计Fig.5 Design of hardware circuit for liquid level detection
2.2.1 正弦波信号处理电路
超声波探头发射与接收的信号为正弦波信号。首先,经过放大后的正弦波信号通过二极管峰值包络检波电路[4]将交流信号转变为直流信号。其次,将直流信号通过运放OP07进行放大。当没有接收到信号时,三极管处于截止状态,系统不做任何反应。当接收到的信号不小于4 V时,三极管处于饱和状态,单片机得到3.3 V高电平信号,开始对数据进行处理,LED灯亮起,如图6所示。
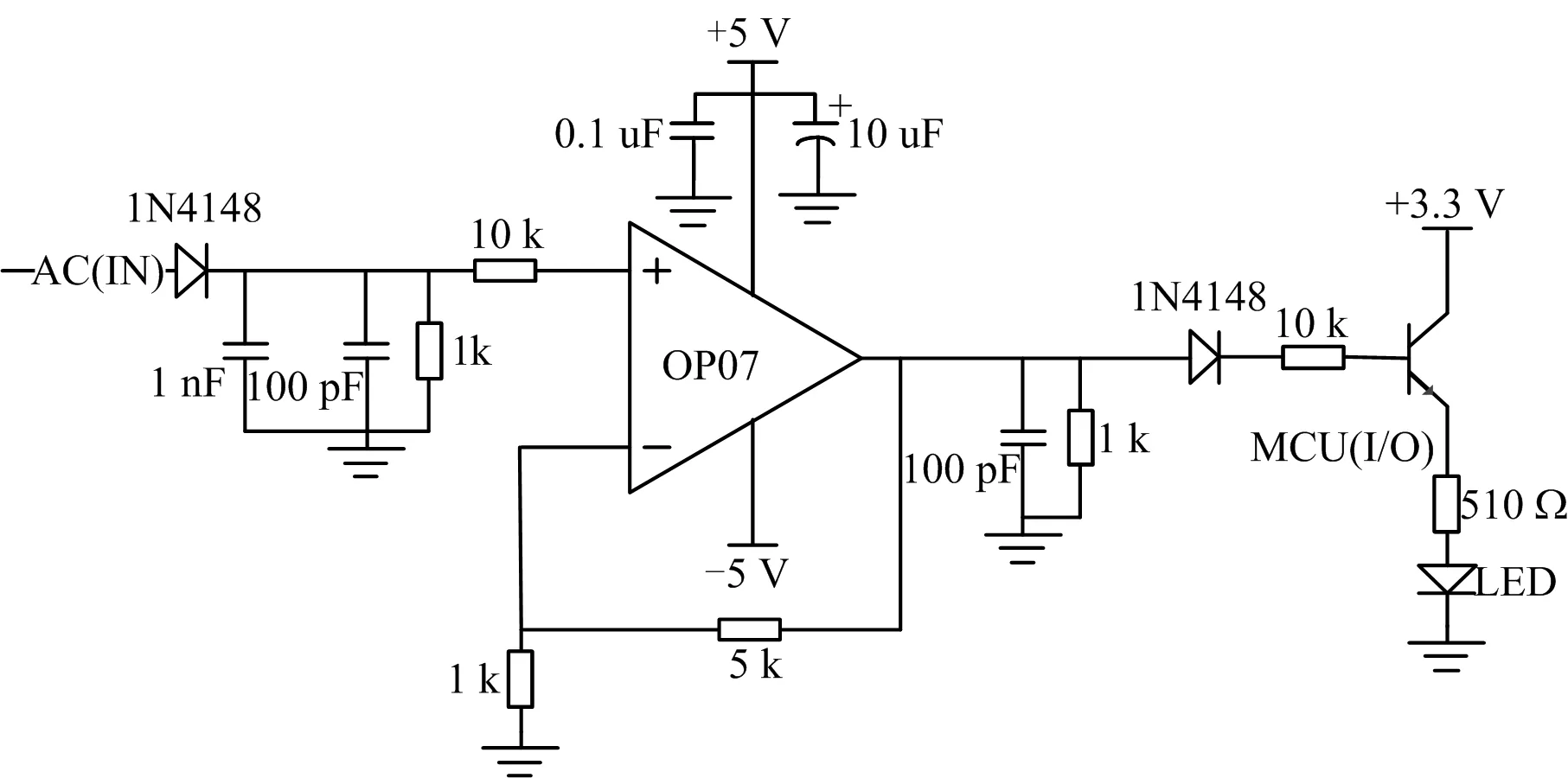
图6 正弦波信号处理电路示意Fig.6 Schematic diagram for circuit of sine wave signal processing
2.2.2 超声波液位检测装置的检测过程
装置通电,等待物联网模块联机完成,上位机收到系统初始化完成信息,OLED屏显示系统用户界面(UI)。进入系统后通过按键组合选择测量容器的材料与厚度,选择完毕后按下相应按键打开装置,系统发射正弦波信号,如图7所示。
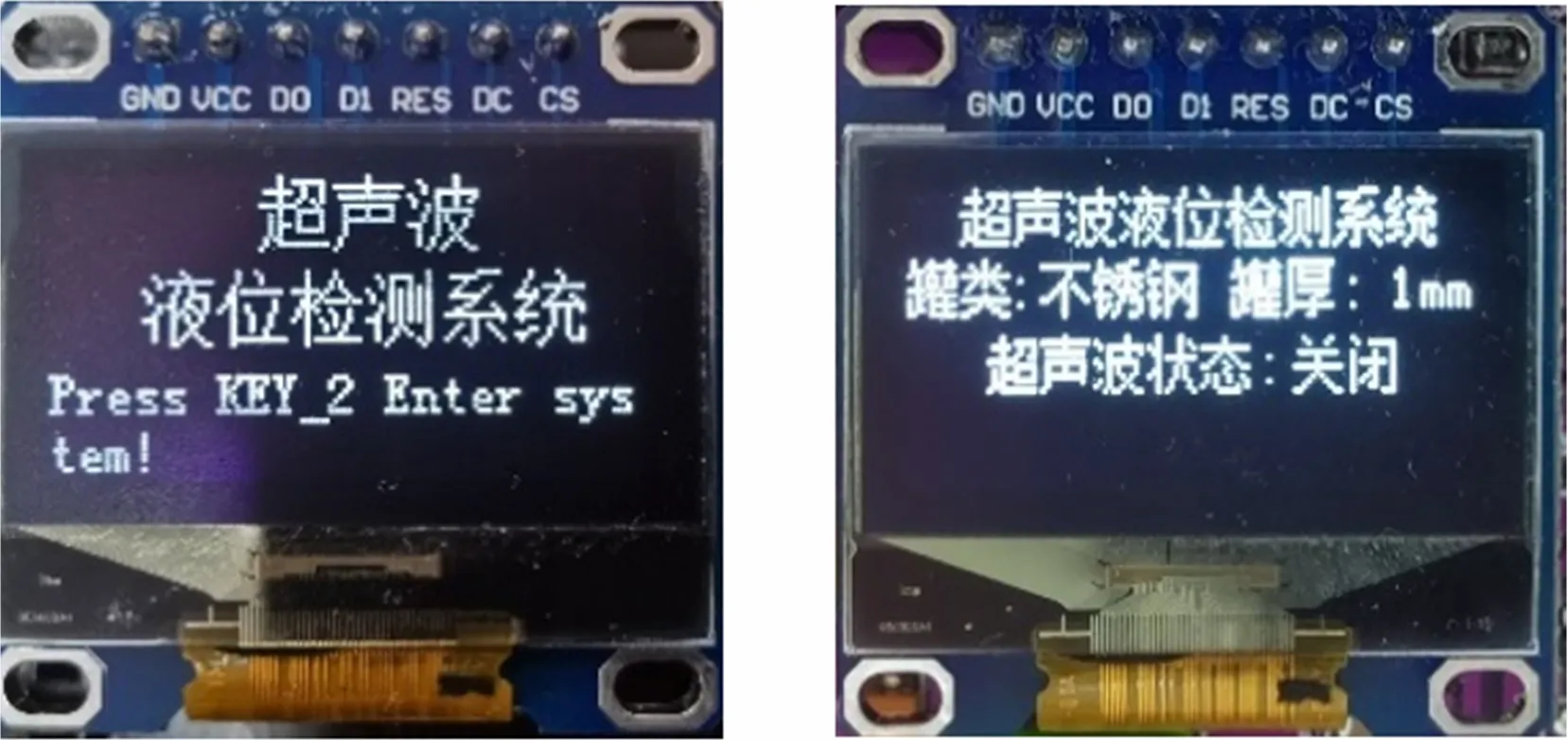
图7 系统UI显示信息Fig.7 Display information of system UI interface
正弦波信号激励超声波发射探头。当超声波发射探头和接收探头都处于被测液体上方或发射探头在液体上方而接收探头在液体下方,这2种情况系统不做任何反应。当超声波发射探头和接收探头都处于被测液体下方时,检测板LED灯点亮,并在上位机、阿里云端以及OLED显示屏上显示当前测量数据,超声波液位检测装置如图8所示。

图8 超声波液位检测装置实物Fig.8 Entity of ultrasonic liquid level detection device
3 实验与分析
利用超声的透射特性检测密闭容器的液位装载状态时,需保证被测容器表面基本光滑,超声探头与被测容器充分耦合。本文实验分别对铁罐(表面基本光滑)以及不锈钢罐(表面较为粗糙)内水和机油进行液位检测。表1为本文实验中选用的部分测量参数。
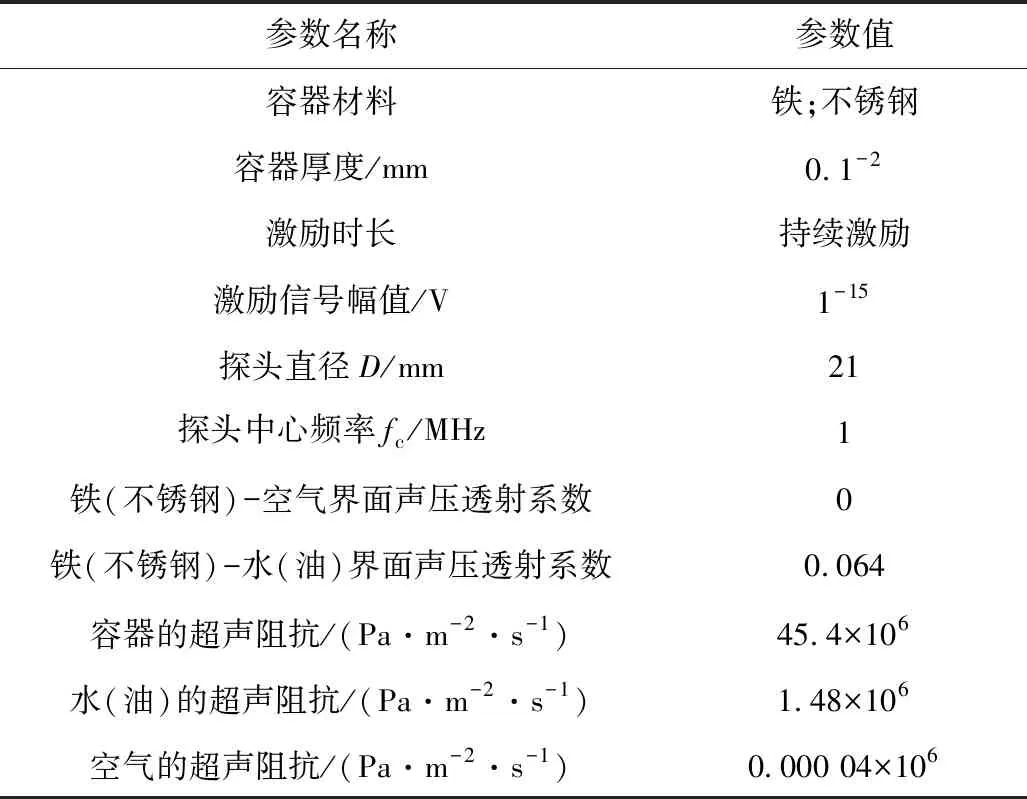
表1 本文实验测量参数Table 1 Experimental measurement parameters
3.1 铁罐内水位测量
被测容器为铁罐,如图9所示。该罐长12 cm、宽10 cm、高18 cm、厚度接近1 mm。超声探头采取铁罐外表面一侧上下放置,在发射探头与接收探头表面涂抹超声耦合剂,自下而上进行扫描,观测示波器接收回波的信号变化。

图9 待测铁罐容器Fig.9 Iron tank container to be tested
本文实验证明,以发射探头的激励幅值取12 V为例,当超声波发射探头和接收探头都处于水位下方时,接收探头接收到正弦回波,如图10所示。此时装置LED灯点亮,显示屏上实时显示当前水位在铁罐内的高度,并向上位机以及阿里云端上传当前的液位高度数据以及容器的倾斜情况,上位机显示的测量数据如图11所示。

图10 超声波发射探头和接收探头都处于水位下方时检测到铁罐内水的回波显示Fig.10 Echo display of detected water in iron tank with both ultrasonic transmitting probe and receiving probe under liquid level
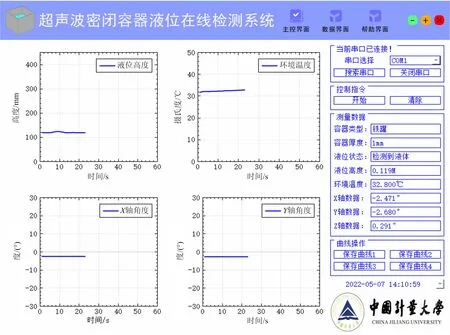
图11 上位机测量数据Fig.11 Measurement data of upper machine
当发射探头介于水位与空气间,接收探头处于水位下方时,随着发射探头上移,接收到的回波呈现逐渐递减状态,如图12所示。
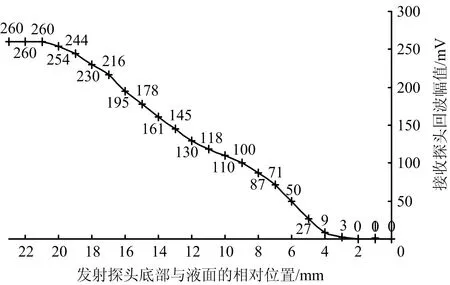
图12 超声波发射探头介于水位与空气间,接收探头处于液位下方时,不同发射探头位置接收到的回波幅值变化Fig.12 Change of echo amplitude received at different transmitter probe positions with ultrasonic transmitting probe between liquid level and air and receiving probe below liquid level
当超声波发射探头和接收探头都处于被测水位上方或发射探头在水位上方而接收探头在水位下方时,接收探头未接收到正弦回波,如图13所示,此时装置没有任何反应。
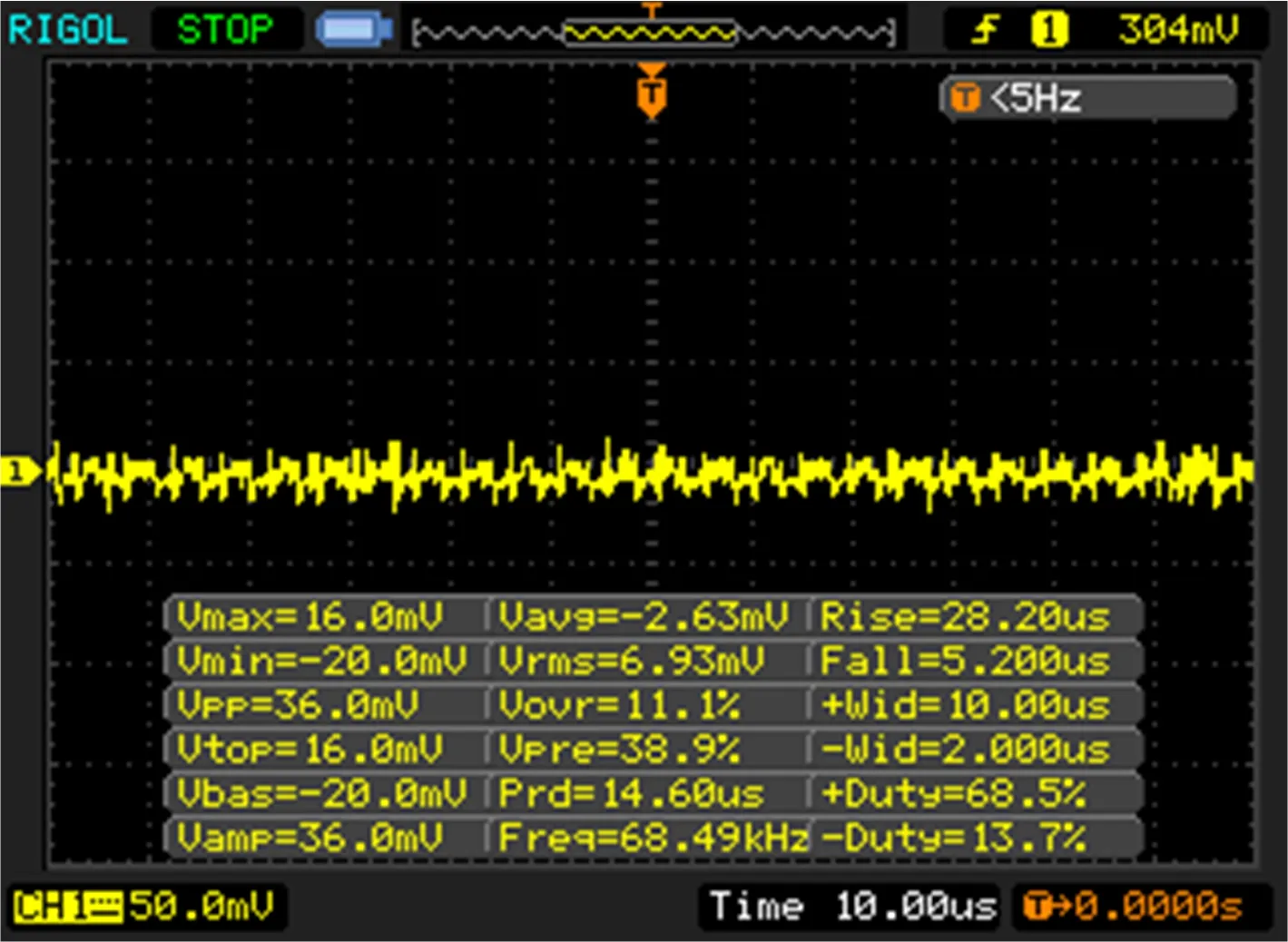
图13 超声波发射探头和接收探头都处于被测水位上方或发射探头在水位上方而接收探头在水位下方时未检测到铁罐内水的回波显示Fig.13 Echo display of undetected water in iron tank with both ultrasonic transmitting probe and receiving probe above measured liquid level or transmitting probe above liquid level and receiving probe below liquid level
为查看透过被测铁罐的声压大小,将2个超声探头分别置于被测铁罐壁一侧内外表面,如图14(a)所示。将2个超声探头置于被测铁罐壁两侧外表面相对位置,如图14(b)所示。

图14 2个超声探头置于被测铁罐壁不同位置Fig.14 Two ultrasonic probes placed in different positions on wall of measured iron tank
通过软件与硬件结合,给予发射探头不同激励幅值,接收探头回波幅值如图15所示。
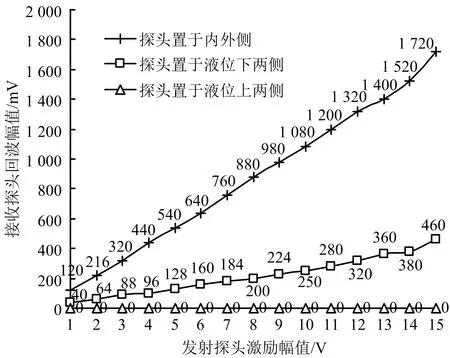
图15 不同激励幅值探头置于铁罐两侧与内外侧接收探头回波情况Fig.15 Echo of probes placed on both sides and inside and outside with different excitation amplitudes
由图15可知,当激励幅值不断增大时,接收探头的回波幅值也同样增大。将探头置于被测容器壁一侧内外表面时,透过容器的声波存在衰减现象,基本呈线性。将探头置于液位上方两侧相对位置时,接收探头没有收到回波。
当发射探头与接收探头采取在铁罐一侧外表面上下放置时,通过多组重复实验记录在不同激励幅值,当2个探头在水位下方时收到的回波幅值情况,如图16所示。
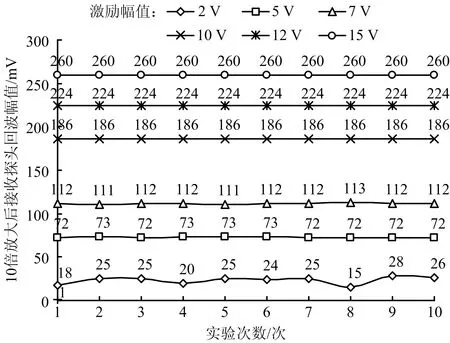
图16 发射探头与接收探头处于铁罐一侧外表面上下放置时,不同激励幅值下水的回波幅值Fig.16 Echo amplitude of water under different excitation amplitudes with transmitting probe and receiving probe on external surface of iron tank on one side with upper and lower arrangement
由图16可知,激励幅值为2 V时,回波幅值变化明显,波形受参杂严重。激励幅值大于5 V时,回波幅值基本稳定。对比图15,当2个探头采取在铁罐一侧外表面上下放置时,接收探头收到的回波幅值比将探头直接置于容器两侧外表面要小很多。将探头置于液位下铁罐壁两侧外表面时声波的衰减比探头置于一侧外表面时衰减严重,同样基本呈线性。说明探头采取在铁罐一侧外表面上下放置,此时接收探头收到的回波幅值是超声波在被测水中经过多次折射、透射、反射后所得到的值。超声波总声压[16]反射系数、透射系数可由式(8)~(9)表示:
(8)
(9)
式中:rp为声压反射系数;pr为反射波声压,Pa;pi为入射波声压,Pa;pt为透射波声压,Pa;d为被测液体的厚度,m;m为介质1与介质2的声阻抗比值;λ2为被测液体波长,m。
为尽可能减少功耗以及保证数据可靠性,根据实验结果测得在不同激励幅值下的测量误差、液位状态误判情况以及装置功耗,不同激励幅值下测量10组数据并取平均值,如表2所示。

表2 不同激励幅值下铁罐内水位情况Table 2 Water level in iron tank under different excitation amplitudes
从表2测试结果可知,激励幅值取5 V时,罐内的液体位置基本可以判断,根据表中数据可以得到激励幅值越低,装置的功耗越小。因此将5 V作为检测0.5 mm铁罐的正弦波发射幅值。
3.2 不锈钢罐内水位测量
如图17所示,不锈钢罐口径50 cm,罐高50 cm,厚度接近1 mm。不锈钢罐的体积与厚度相对铁罐较大,因此声波的衰减也相对较大。

图17 待测不锈钢罐Fig.17 Stainless steel tank to be tested
在测量不锈钢罐内水位时,接收回波的信号需要更大的放大倍数才能看到实验现象。在回波信号放大10倍后,接收探头接收到的回波如图18所示。
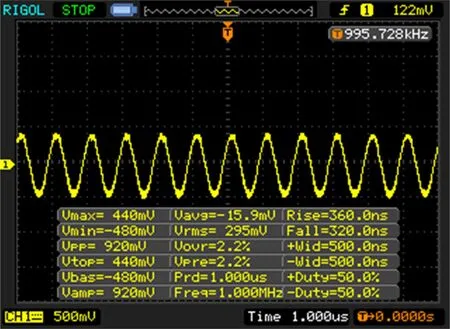
图18 超声波发射探头和接收探头都处于水位下方时检测到不锈钢罐内水的回波显示Fig.18 Echo display of detected water in stainless steel tank with both ultrasonic transmitting probe and receiving probe under liquid level
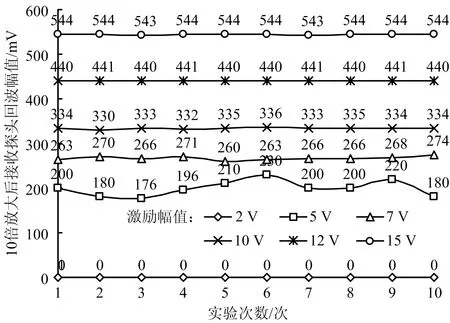
图19 发射探头与接收探头处于不锈钢一侧外表面上下放置时,不同激励幅值下水的回波幅值Fig.19 Echo amplitude of water under different excitation amplitudes with transmitting probe and receiving probe on external surface of stainless steel tank on one side with upper and lower arrangement
与检测铁罐时采取方法相同,在不同激励幅值下测得不锈钢罐的回波幅值,如图19所示。随着被测容器体积与厚度增加,水的回波幅值比测量铁罐时小许多。激励幅值取2 V时,即使对信号放大10倍,也没有收到回波。激励幅值取5 V时,回波信号变化明显。在回波大于7 V时,回波信号基本趋于稳定。当激励幅值大于10 V时,在液位以上位置,回波信号放大10倍,会收到类似正弦的杂波信号,以激励幅值12 V为例,回波情况如图20所示。杂波信号经过运放下一级放大,对实际液体位置判断产生一定影响。
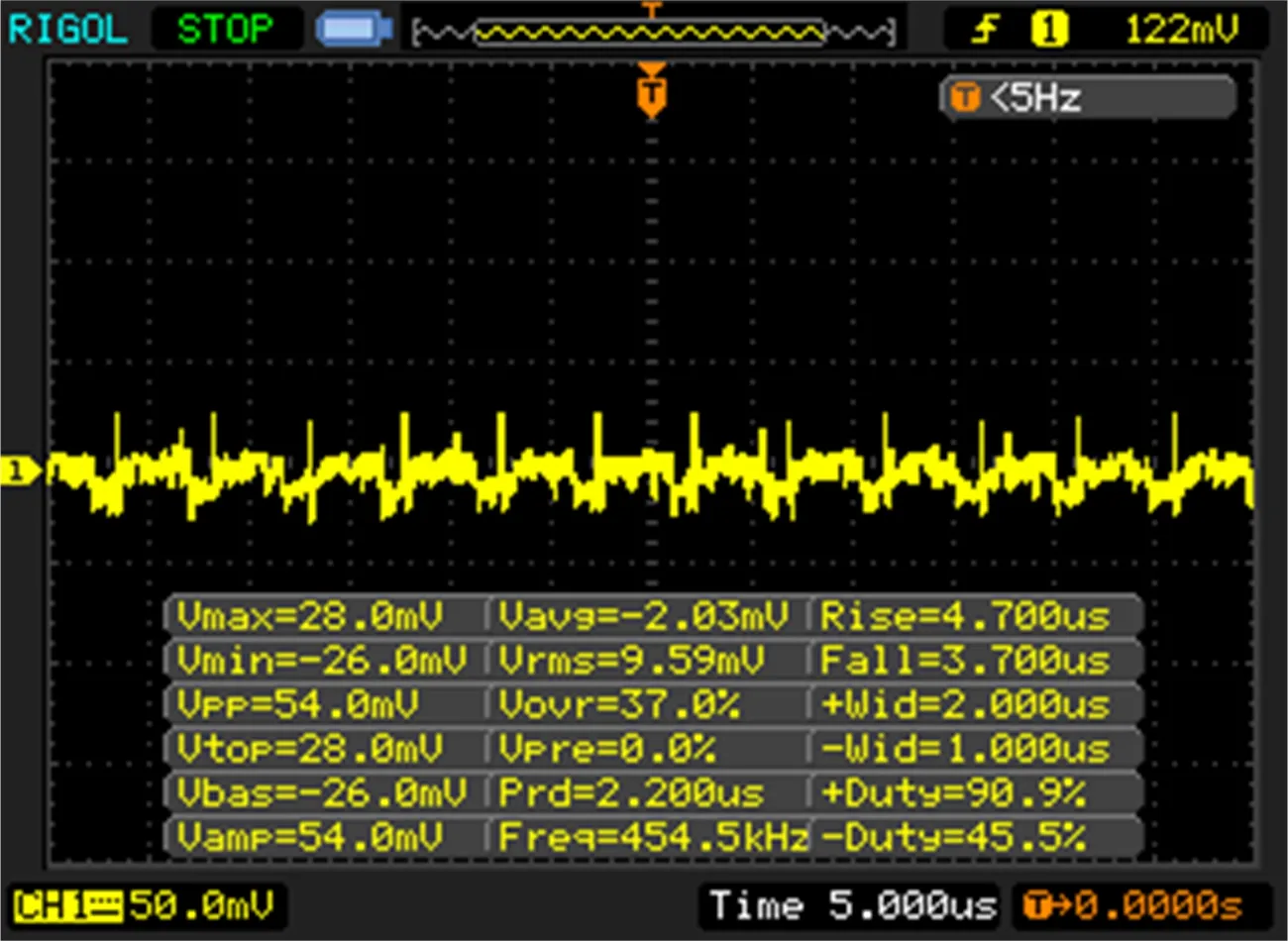
图20 不锈钢罐容器受激励幅值为12 V时检测到水回波情况Fig.20 Water echo detected in stainless steel tank vessel with excitation amplitude of 12 V
同理,经过重复实验,测量10组数据取平均值,对数据进行分析,测试结果如表3所示。从测试结果可知,在激励幅值取7 V时,液体位置测量结果较为准确,
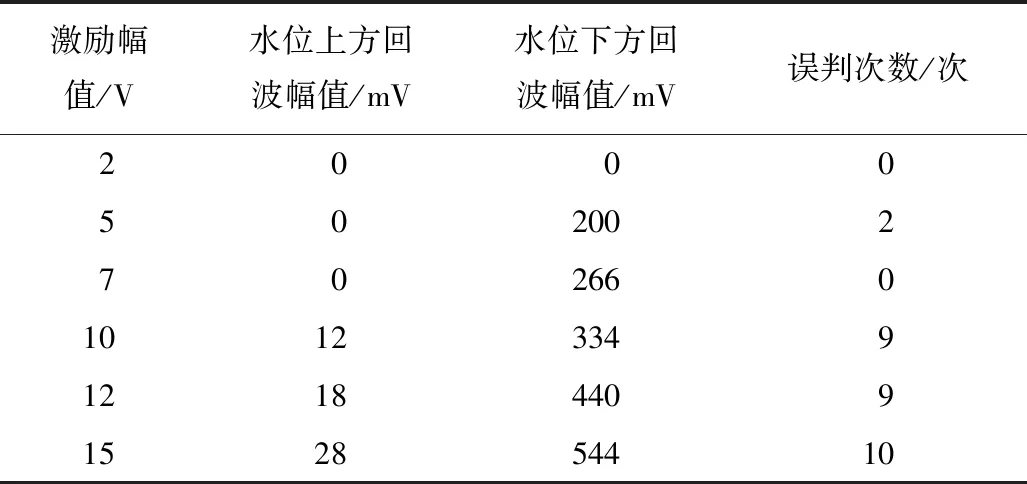
表3 不同激励幅值在放大10倍下测量不锈钢罐内回波幅值情况Table 3 Measured echo amplitude in stainless steel tank with different excitation amplitudes amplified by 10 times
基本不存在误判。因此将激励幅值取7 V作为检测厚度约为1 mm不锈钢类容器的正弦波发射幅值。
3.3 其他液体实验验证
为验证超声阻抗法以及装置测量的准确性与可行性,将待测铁罐内的液体换成与水阻抗值相近的机油。回波幅值测量结果与水的测量结果基本相同,如表4所示。

表4 不同激励幅值下铁罐内机油回波幅值情况Table 4 Echo amplitude of engine oil in iron tank under different excitation amplitudes
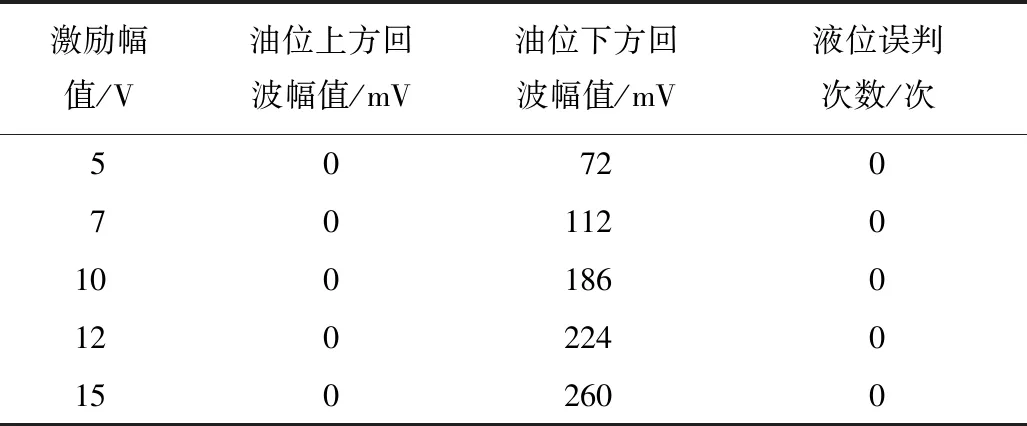
表4(续)
3.4 大型密闭容器内液位测量方式
当被测对象为大型密闭容器时,以槽罐车内液位测量为例,对于容器内液位无法直接测量。本文设计装置采用链条式表贴方法,在容器的外表壁成对表贴超声探头,如图21所示。以自下而上扫描的方式,对容器内液体进行液位测量,扫描过程中当超声探头组检测到液体时,向上位机和云端上传当前液位高度。
图21 测量大型密闭容器Fig.21 Measured large closed vessel
4 结论
1)本文液位测量装置可测量不同材料、厚度容器内装载液体液位,所测数据较为稳定,数据误差范围不大于3 mm。测量装置可根据被测容器物理特性,在确保容器液位可测情况下,减少装置功耗,并向上位机和云端上传当前液位高度及容器倾斜情况。测量大型容器时,需要提高超声波发射探头功率,具体过程需通过实验校准。
2)被测容器的表层防腐处理对测量结果几乎没有影响,但表层的光滑度对测量结果具有一定影响。超声波探头在发射与接收声波过程中,如果被测容器表面过于粗糙,与探头耦合不充分,接收探头所接收的回波会小很多,甚至接收不到回波。
猜你喜欢
压电与声光(2022年3期)2022-07-16
现代电影技术(2021年11期)2021-12-27
作文周刊·小学三年级版(2021年4期)2021-04-06
学校教育研究(2020年9期)2020-05-25
中国科技纵横(2019年3期)2019-03-25
汽车工程(2018年12期)2019-01-29
科技与创新(2018年19期)2018-11-30
作文周刊·小学三年级版(2017年42期)2017-12-05
汽车维修技师(2016年3期)2016-08-31
汽车维护与修理(2015年2期)2015-02-28