月壤含水特性原位快速预判传感器设计与验证
2022-11-17 02:03马如奇裘桢炜倪文成
宇航学报 2022年10期
马如奇,裘桢炜,潘 博,倪文成
(1. 北京空间飞行器总体设计部,北京 100094;2. 中国科学院安徽光学精密机械研究所,合肥 230031)
0 引 言
深空探测是人类探索和认知宇宙的重要科学途径,月球作为距离地球最近的天体,一直是深空探测领域的重要探测对象[1-2]。随着近年来对月球探测和研究的不断深入,月球极区水冰存在性以及月球水的来源再次成为月球探测研究的热点和焦点问题[3-4]。中国已顺利完成了“绕、落、回”三步走的月球探测总体战略[5],根据中国月球探测后续规划,月球后续任务将对极区永久阴影坑进行无人就位采样探测,并对水冰的存在性与来源性等科学问题展开研究[6-7]。
与目前各国已开展的中低纬度无人月球采样探测任务相比,月球极区永久阴影坑采样探测任务面临诸多全新困难:如受光照、深低温(40 K)等环境条件制约,探测器在永久阴影坑着陆后将无法得到能源补给,探测器坑内存活寿命及允许工作时间会受到严格限制;另外,永久阴影坑遥感数据表明坑内水冰分布不均匀,分布随机性较大[8]。在前述困难客观存在的前提下,通过实时对采样设备产生的月壤样品的含水特性进行原位快速预判,及时发现可供科学载荷分析的高含水概率月壤,并最大程度避免对不含水(或低含水)月壤样品的误送与误分析,将会大幅提升坑内水冰就位采样探测效率,增加探测器存活期内的采样分析次数,从而有利于提高水冰证认概率。因此,月壤水冰原位快速预判技术是极区永久阴影坑水冰就位探测任务实施过程中亟待解决的关键性技术。
目前,可用于月壤含水特性探测的方法主要有热重法、质谱法、光谱法、中子谱法、遥感雷达及热电法等,各探测方法的典型特点如下:
(1)热重法:通过对月壤进行控温加热,利用月壤加热前后的质量差对月壤的含水量进行精确测量,该方法属于接触式测量,需对样品进行加热,测量精度较高,质量功耗较大,单次分析时间较长,宜用于地面科学分析载荷设计;
(2)质谱法:通过对月壤加热后的气体挥发分进行质谱分析,根据质谱分析结果对月壤是否含水及含水量进行反演,该方法属于接触式测量,需对样品进行加热,测量灵敏度高,测量精度较高,质量功耗较大,可用于在轨科学分析载荷设计[9-10];
(3)中子谱法:通过对一定深度H分布的测量来间接推测该深度月壤水含量及水分布,推测结果易受包括-OH在内的其他含H物质影响,该方法属于非接触式、间接性测量,单次分析时间相对较长,比较适用于采样区域初步选址[11];
(4)遥感雷达:雷达探测深度较大,但抗干扰性较差,易受岩石等地质条件影响,高频区水冰特性不明显,且受质量体积等限制,宜配置在轨道器对探测区域进行大范围寻址[12-13];
(5)热电法:通过测量不同温度下月壤介电系数的差异对月壤是否含水及含水量进行反演,属于接触式测量,需对样品进行加热,测量精度较低,功耗极低且质量小,可用于就位粗判,但易导致水冰受热升华[14];
(6)光谱法:通过物质的光谱吸收或反射特性对物质成分及含量进行较为精确的测量,该方法属于非接触式、直接性测量,具有探测精度高、探测时间短、无需对样品进行加热等优点,特别适用于月壤水冰原位预判[15-16]。
本文在对月球极区永久阴影坑采样探测任务需求、采样系统方案及极区月壤特性等进行分析的基础上,重点对采用近红外激光对月壤含水特性进行快速预判的传感器设计、预判策略及试验等进行研究,以期解决极区永久阴影坑水冰就位探测任务实施过程中面临的月壤水冰原位快速预判关键技术。
1 设计分析
1.1 采样任务分析
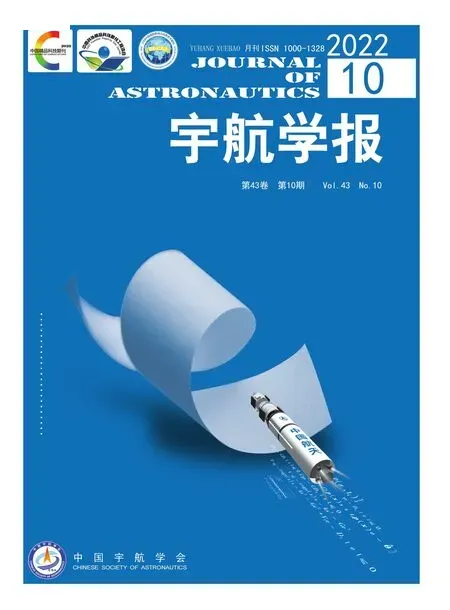
在月球极区永久阴影坑水冰就位采样探测任务中,考虑水冰可能分布及极区月壤机械特性,采样系统共配置了两套独立的采样设备:采样机械臂与钻进采样装置。其中,钻进采样装置采用回转冲击钻进方式潜入月面并不断排出钻屑;采样机械臂上配置水冰预判传感器及采样器,利用水冰预判传感器对钻进采样装置排出钻屑样品的含水特性进行实时预判,由采样器对预判高含水概率的样品进行采集并转移至探测器配置的科学载荷设备开展进一步的精准分析。探测器可在月表移动,以拓展采样区域。采样系统组成及布局如图1所示。
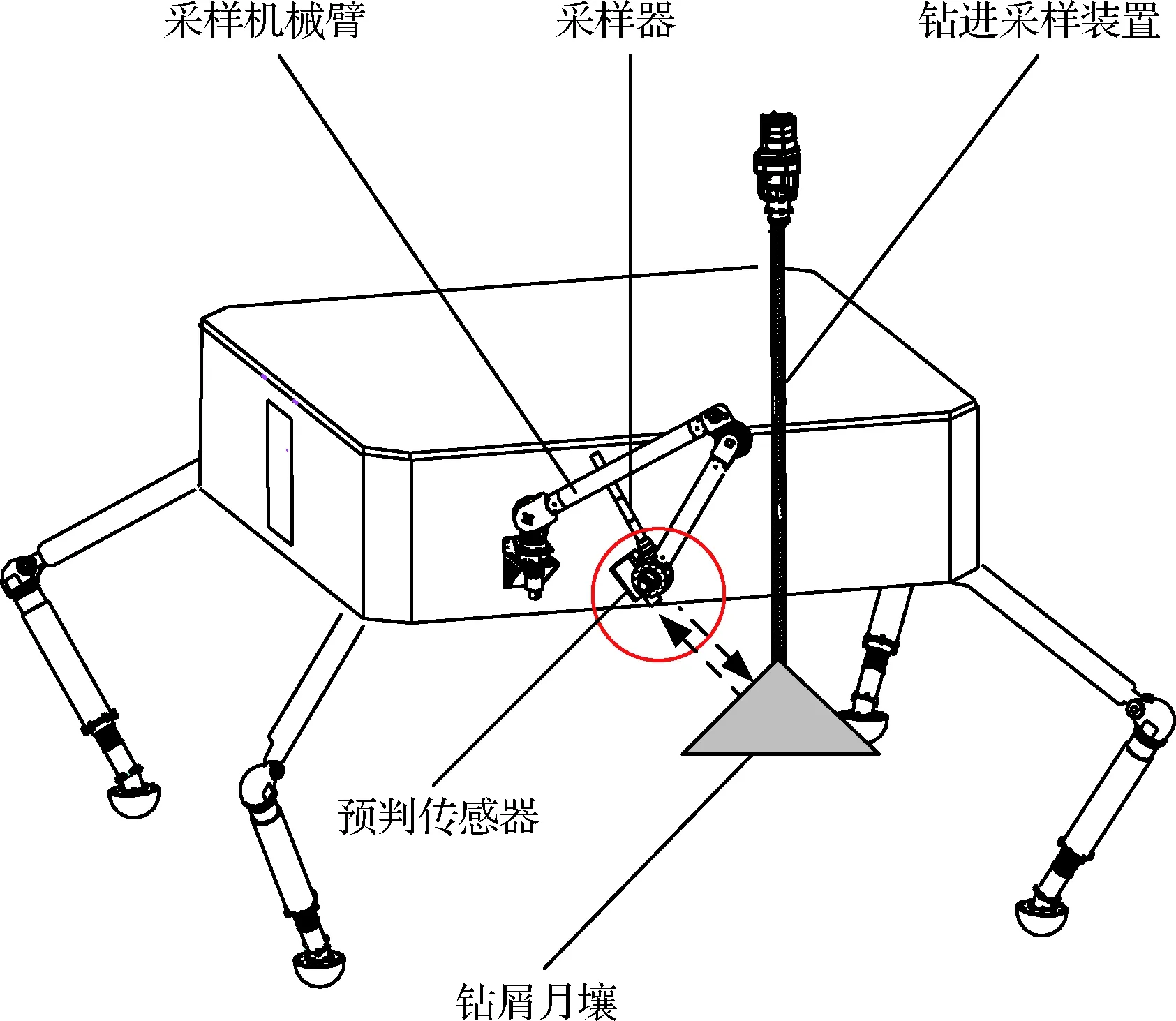
图1 采样探测系统总体设计Fig.1 Design of the sampling exploration system
通过对采样系统任务过程分析可以看出,单次采样任务可以分为钻进排屑、样品预判、样品采集与样品转移4个关键环节。其中,样品预判环节的主要目的是通过对钻进采样装置钻屑样品的含水特性进行原位实时快速预判,及时发现可供科学载荷分析的高含水概率月壤,并最大程度避免对不含水(或低含水)月壤样品的误送与误分析,以提升坑内水冰就位采样探测效率,增加探测器存活期内的采样分析次数,提高水冰证认概率。通过对预判环节分析,可明确采样探测任务对水冰预判传感器提出如下核心需求:
(1)质量轻、体积小、功耗低:根据采样系统总体设计,水冰预判传感器布置在采样机械臂末端。为便于传感器在机械臂末端布局,水冰预判传感器的体积及质量应予以控制;考虑坑内能源无法补给,水冰预判传感器的功耗不宜过高。
(2)预判敏度:水冰预判传感器的核心用途是对钻屑样品是否含水进行预判,其虽非月壤样品是否含水的表决性设备,但其预判结果会直接决定是否将月壤样品转移给科学载荷设备开展进一步精确分析。综合考虑月球极区水冰分布遥感数据、探测器科学载荷设备分析敏度、预判传感器资源约束等影响因素,确定臂载水冰预判传感器的月壤含水量检测限为1%(质量分数)。
(3)预判速度:水冰预判传感器对钻进采样装置排出钻屑的含水特性进行预判,因红外光谱对月壤的穿透性较差,仅可对表层月壤含水特性进行预判,故为避免月壤堆积覆盖对含水预判实时性的影响,综合考虑深低温环境含水月壤机械特性、钻进采样装置钻进速率、钻进采样装置排屑效率等因素,确定水冰预判传感器的单次检测时间应为秒级。
(4)预判范围:水冰预判传感器配置在采样机械臂上,通过机械臂运动对一定范围内表层月壤含水特性进行预判;在对钻进采样装置钻屑进行预判时,综合考虑月尘对传感器影响、传感器预判精度、机械臂构型布局,确定水冰预判传感器的预判范围:光斑直径@检测距离为5 cm@500 mm。
1.2 月壤特性分析
采用近红外谱段对月壤含水特性进行预判探测的基本原理是含水月壤与干月壤的光谱反射特征存在差异,考虑月壤的含水率、矿物组分、粒径分布、赋存形态及温度等均会影响光谱的反射特性,故有必要对极区月壤特性进行分析研究,以为水冰预判传感器的设计与测试提供基本依据。
鉴于目前已开展的月球探测任务均未获取到极区月壤样品,但通常认为极区具有与月陆相近的地质演化特征,极区月壤形成和演化历史也与月陆区相近[17-18],故极区月壤特性可参考已获取的月陆地区月壤样品研究数据。阿波罗16号是唯一在月陆地区着陆并采样返回的任务,因此阿波罗16号样品的分析结果可以真实反映月陆地区月壤特性,相关数据可以作为传感器设计参考。根据阿波罗16号月壤分析结果,其在矿物组成上以斜长石与辉石为主,并含有少量玻璃体等物质,其中斜长石占比约为70%~80%;月壤粒径分布与月海类似,主要由小于1 mm的颗粒组成,其平均粒径约在101~268 μm之间;根据极区遥感数据分析,极区光照区平均温度约高于110 K,永久阴影坑最低温度接近40 K。
2 传感器设计
2.1 探测波段优选
水冰预判传感器的关键探测目标是月壤中可能存在的水冰物质,故在传感器光谱谱段选择时应优先考虑水冰自身的红外光谱特性。根据美国USGS数据库中标准水冰近红外光谱数据(见图2),标准水冰在1.5 μm, 2.0 μm附近存在较明显的局部吸收特性,而在1.2 μm, 1.8 μm附近存在较明显的局部反射特性。因此,可选用1.2 μm与1.5 μm附近谱段的2组红外激光组成一对差分探测光谱,选用1.8 μm与2.0 μm附近谱段的2组红外激光组成一对差分探测光谱,通过利用水冰物质在2组差分探测光谱处的吸收/反射特性实现对水冰的预判探测。综合考虑确定预判传感器选用的红外激光波长分别为1.272 μm, 1.512 μm, 1.854 μm, 2.004 μm。
根据前文月壤特性分析可知,极区月壤的主要成分是斜长石、辉石及少量玻璃体。根据ASTER和USGS数据库数据,斜长石的吸收峰约在1.4 μm处,辉石的吸收峰约在1.4 μm与1.9 μm处,石英的吸收峰在1.45 μm, 1.92 μm处,故极区月壤主要成分的吸收峰与本方案选择的1.512 μm, 2.004 μm有较明显区分。另外,阿波罗16号月壤样品的光谱分析结果显示月壤样品在本文选用波长处不存在明显吸收特性。

图2 水冰反射光谱(USGS)Fig.2 Water ice reflection spectrums (USGS)
综上所述,通过分析极区月壤主要矿物的光谱数据,并参考阿波罗16号月壤样品光谱分析结果,选用上述4个波长的激光,其中,选1.512 μm,2.004 μm两个吸收带以提高月壤水冰的预判概率及预判结果置信度;选择吸收带邻近的1.272 μm, 1.854 μm两个非吸收带作为参考,以通过吸收波段与非吸收波段的光强比值对月壤水冰进行预判。
2.2 传感器总体设计
传感器主要由光学系统、电子学单元及结构单元3部分组成,如图3所示。光学系统负责实现多模激光的合束准直、光路分时复用、出射光/反射光同轴传输、反射光接收耦合等功能;电子学单元负责实现多个激光器分时驱动控制、探测器信号处理、预判算法硬件实现及总线通信等功能;结构单元为光学系统及电子学单元提供结构支撑,并可为传感器提供月尘与羽流防护。

图3 传感器基本组成示意图Fig.3 Schematic diagram of the sensor composition
2.3 光学系统设计
传感器光学系统主要功能包括多模激光的合束准直、光路分时复用、出射光/反射光同轴传输、反射光接收耦合等,其光学方案如图4所示。四路激光器出射的激光经合束准直后进入出射光纤,经出射光纤、反射镜中心孔、散射光聚焦透镜后照射到月壤上;出射光经月壤散射后被散射光聚焦透镜接收,聚焦后的散射光通过反射镜反射实现光路换向,后经反射光聚焦透镜再次聚焦后投射到光学探测器并被光学探测器接收。在光学系统设计中,四路激光共用出射光路,发射光路与接收光路共轴设计并复用散射光聚焦透镜,较好地实现了传感器光学系统的轻小型化设计。

图4 传感器光学系统设计Fig.4 Design of the sensor’s optical system
传感器选用四个不同波长的DFB半导体激光器作为探测光源,激光器采用单模光纤输出。为实现四路激光对光学系统光路的分时复用,四个激光器的出射光经单模光纤引出后,在传感器光路出射端进行多模光路合束与准直处理(如图5),光纤合束避免采用分束器等光学元件,有效减小了整个光学系统的质量与体积。
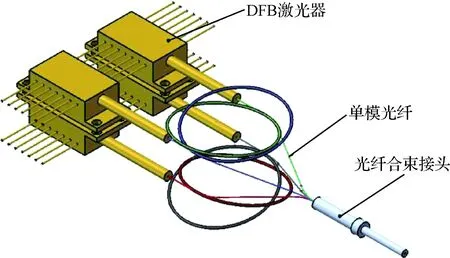
图5 DFB激光器光纤合束示意图Fig.5 Schematic diagram of fiber combination of the DFB laser
光学系统共包括2片聚焦透镜及1片带中心孔的反射镜,所有镜片尺寸空间为直径Φ20×30 mm。出射光经散射光聚焦透镜后在50 cm距离处照明光斑直径约为5 cm;采用大投射光斑设计可有效避免月壤表面不同位置的反射率差异对反射光信号的影响,将反射率差异平均化处理,以提高回光光强的稳定性;月壤散射光接收光路采用双聚焦透镜设计,以保证接收光斑始终处于探测器感光面之内;探测器感光面直径为3 mm,以50 cm处光斑直径5 cm为条件,对探测器接收光斑直径仿真分析,结果表明感光面内的接收光斑直径小于3 mm,能被探测器完全接收;实际工作时,当探测距离小于50 cm,对应的漫反射光也可完全被接收透镜接收。
2.4 电子学单元设计
电子学单元集成在两块电路板上,包括四个激光器及其驱动控制电路、FPGA及其外围电路、探测器电路、总线控制器电路及电源电路等。为实现四个激光器对光路的分时复用,四个DFB激光器采用分时工作模式,由单个驱动芯片采用“一拖四”方式进行驱动(如图6),四路DFB激光器采用并联方式共用驱动电路,并由PMOS对激光器进行开关控制。
图6 DFB激光器驱动电路设计方案Fig.6 Design of the DFB laser driver circuit
传感器DFB激光器调制频率设计为1 kHz,工作时四个激光器轮流开启,即单个激光器的最大开关频率为250 Hz,传感器最小探测周期为4 ms。每个激光器启动的占空比约为1/4,即单个探测周期内每个激光器的开启时间为250 μs;探测器输出的AD采样率设计为500 kHz,故在单个激光器的开启时间内可实现125次采样,并通过多次采样值累加来降低探测过程中的随机误差和噪声。
基于传感器电子学单元设计,在静态探测模式,按照单次预判时间1 s计算,传感器按照最小探测周期(4 ms)工作时,可通过获取的250个探测周期的平均值或累加值来计算预判结果,以获得较高的检测精度;在动态探测模式下,按探测器平台月面移动速度为0.2 m/s计算,为确保单次检测过程中视场(光斑直径5 cm)的变化不大于50%的总视场,单次预判时间需要控制在125 ms以内,故可以采用31个探测周期的平均值或累加值来计算预判结果,以获得较高的检测精度。
2.5 结构单元设计
传感器结构单元主要为光学系统及电子学单元提供结构支撑,为传感器提供月尘及羽流防护,结构单元总体设计如图7所示。结构单元采用镁合金材料,光学系统和电子学单元均螺接固定于结构框架内部,电路板板间走线及激光器光纤等内部活动组件沿框架点胶固定或螺接固定,确保传感器能够承受主动段力学环境。

图7 传感器结构设计Fig.7 Mechanical structure of the sensor
3 传感器预判策略
3.1 工作模式
水冰预判传感器配置在机械臂末端,除待机模式外,设计有两种工作模式:1)静态探测模式:当探测器平台处于静止状态时,机械臂携带传感器运动至静态探测构型并进行构型保持,水冰预判传感器负责对钻进采样装置排出的静态或准静态钻屑样品的含水特性进行探测预判;2)动态探测模式:当探测平台在月面移动时,机械臂携带传感器运动至动态探测构型并进行构型保持,水冰预判传感器随机械臂腕关节做往复运动,对探测器行进路径上表层月壤的含水特性进行探测预判。
3.2 在轨预判策略
采用近红外谱段对月壤含水特性进行预判探测的基本原理是含水月壤与干月壤的光谱反射特征存在差异。依据前文分析,确定选取波长分别为1.272 μm, 1.512 μm, 1.854 μm, 2.004 μm的红外激光作为传感器探测光源。其中,选取标准水冰在1.512 μm, 2.004 μm的两个吸收带作为预判谱段,以提高月壤水冰预判结果可靠性;选取标准水冰吸收带邻近的1.272 μm, 1.854 μm两个非吸收带作为参考谱段;通过1.272 μm与1.512 μm谱段对月壤反射光光强比值、1.854 μm与2.004 μm谱段对月壤反射光光强比值来判定被测月壤是否含有水冰。采用双波段光强比值进行预判的设计能够避免反射率绝对量变化的影响,采用两组吸收带/非吸收带比值有助于增强预判可靠性。传感器在轨预判策略如下:
传感器基于配置的标准靶标开展月面定标,获取各个探测谱段在月面工作环境下的本底DN值
(1)
在月面工作段,利用光照区表层干月壤或经载荷设备测试确认的非含水月壤,获取传感器各个探测谱段对非含水月壤的DN值
(2)
非含水月壤的DN值dsoil将作为对待预判月壤样品含水特性进行预判的参考。
采用传感器对待测月壤样品进行预判探测,获取待测月壤样品的DN值
(3)
式中:Dice(k)为第k个探测周期传感器DN值矩阵;Dice1.2(s),Dice1.5(s),Dice1.8(s),Dice2.0(s)分别为传感器各个探测波段在第s个采样周期采集的探测器DN值;k为探测周期计数,k∈N;s为采样周期计数,s∈N。
基于第k个探测周期传感器DN值矩阵D(k),计算第k个探测周期内传感器各采样周期的DN值累加值dice(k)
(4)
式中:S为传感器单个探测周期内对光学探测器输出值的采样次数,S∈N+。
根据本文中传感器电子学单元设计,每个激光器的开启时间为250 μs,AD单次采样时间为2 μs,则S=125。通过对探测器各波段采集的DN值进行累加处理,可降低探测过程中的随机误差和噪声。
为降低单个探测周期的随机误差,对传感器各个探测波段在各探测周期的DN值进行均值处理
(5)
式中:dice为传感器单个预判周期各个波段探测器DN值均值;K为传感器单个预判周期内允许探测次数,K∈N+。
假定一个预判周期为t秒,根据本文中传感器电子学单元设计,单个探测周期为4 ms,则可计算一个预判周期内可完成的探测次数
K=1000t/4
(6)
计算1.2波段与1.5波段干月壤DN值比值
(7)
计算1.8波段与2.0波段干月壤DN值比值
(8)
计算1.2波段与1.5波段预判月壤DN值比值
(9)
计算1.8波段与2.0波段预判月壤DN值比值
(10)
计算两个探测波段DN值比值的差值
ΔRice1.2/1.5=Rice1.2/1.5-Rsoil1.2/1.5
(11)
ΔRice1.8/2.0=Rice1.8/2.0-Rsoil1.8/2.0
(12)
若下式成立
(13)
则判定月壤样品有较大概率含水冰。
3.3 在轨定标策略
根据预判策略,在使用前需完成传感器本底DN值定标及干月壤DN定标。受飞行段空间环境影响及月面新应用环境与地面环境差异影响,月面工作段激光器可能会发生衰变,光学探测器响应特性可能会发生变化,而传感器核心部件参数变化必将影响传感器检测限指标,进而可能导致传感器预判结果失真。为消除传感器自身参数变化对预判结果的影响,为传感器配置了反射率确知的标准靶标,通过对定标靶标及深空暗目标(在轨条件下观测背日深空)的观测即可完成传感器在轨定标,获得各探测谱段在月面工作环境下的本底DN值dbase。
为消除地面模拟月壤与真实月壤的光谱反射特性差异对预判结果的影响,传感器在工作前需开展干月壤定标。根据目前遥感数据,极区光照区表层月壤温度较高,不满足水冰稳定赋存的温度条件,故可利用极区光照区表层月壤获取传感器各个探测谱段对非含水月壤的DN值dsoil。
4 试验验证
4.1 传感器样机研制
基于前文中的传感器光学系统、电子学单元及结构单元的设计,研制了传感器工程样机,如图8所示。传感器整机实测质量为495 g,实测包络尺寸为64.5 mm×64.5 mm×156.5 mm,实测平均功耗16 W。

图8 水冰预判传感器实物照片Fig.8 Photo of the lunar water ice prediction sensor
4.2 含水月壤制备
为验证传感器检测限,基于两种类型的模拟月壤,分别制备10组低含水率模拟月壤样品。月壤样品制备及测试过程为:1)将月壤样品加热到140 ℃维持4 h,确保月壤水分烘干;2)在高温条件下将月壤样品转移至充满氮气的密封罩中降温并静置24 h,采用水汽吸附法在样品表层形成低含水率模拟月壤;3)在密封条件下,将待测试样品转移至充满低温氮气的试验系统中,并利用试验系统中预置液氮工装为月壤样品降温;4)在试验系统内对低温月壤样品称重后,将月壤样品转移至传感器正下方500 mm处进行含水特性预判测试;5)测试完成后,将低温月壤样品从试验系统中取出,将月壤样品加热到140 ℃维持4 h,确保月壤水分烘干后称重。S1,S2两类模拟月壤采用粒径均小于1 mm的斜长岩与玄武岩并按照7∶3的比例配置,但斜长岩的采掘地域不同,低含水率模拟月壤参数见表1。

表1 低含水率模拟月壤过程参数Table 1 Process parameters of the simulated lunar soil with low water content
4.3 检测限验证试验
为验证传感器检测限等关键性指标,搭建了传感器试验验证系统,如图9所示。试验系统由透明全密封手套箱及内置的电子天平、升降支架、传感器样机、液氮制冷工装、温度传感器、样品测试支架等组成。其中,升降支架用于调整传感器与待测目标间的距离;温度传感器可实时测量含水月壤环境温度;预判传感器通过转接电连接器与手套箱的测试控制器连接用于接收测试数据。试验开始前,先向液氮制冷工装的样品腔和手套箱内充高纯氮气,待样品腔内空气排尽后,向液氮制冷工装的样品腔注入液氮,为测试样品提供低温环境;试验实施过程中,测试环境维持暗室条件。

图9 传感器检测限验证试验Fig.9 Verification test of the sensor detection limits
试验步骤为:1)采用暗目标对传感器定标,获取传感器本底数据dbase;2)对烘干的无水模拟月壤预判测试,获取干壤定标数据dsoil;3)采用液氮对水汽吸附法制得的低含水率月壤样品降温,制备低温月壤水冰;4)对称重后的月壤水冰样品预判测试,获取测试数据dice;5)重复试验完成全部样品测试;6)将全部样品再次烘烤去水并称重;7)按预判策略处理测试数据,结果如表2、表3所示。
从测试结果可知:传感器对两类地面模拟月壤水冰样品的检测限分别为0.39%与0.28%,预判效果较好;月壤矿物组分及粒径等特性确实会影响传感器预判效果;单组光谱测试值中存在低含水率月壤可预判而邻近高含水率月壤不可预判的情况,经采用标准水合物对传感器进行复核测试后确认传感器预判一致性良好,经分析确认传感器测试数据波动是受低含水率模拟月壤制备工艺稳定性因素影响。
本文的含水率检测限专项验证试验是在地面常压低温环境下采用极区模拟月壤开展,传感器在轨真实响应特性(光学、电子学)可能与文中验证试验存在差异。考虑本文研制的传感器采用光强比值算法,地月环境(温度、真空)差异、试验用模拟月壤与真实月壤特性差异(矿物组成、粒径级配、含水率、水冰赋存形式等)等因素对传感器最终预判结果的影响可通过预判算法有效消除;但传感器自身本底在地月环境下的差异对预判最终结果的影响,则仍需通过在轨定标的方法予以解决。

表2 传感器检测限测试数据(S1)Table 2 Test data of the sensor detection limits (S1)
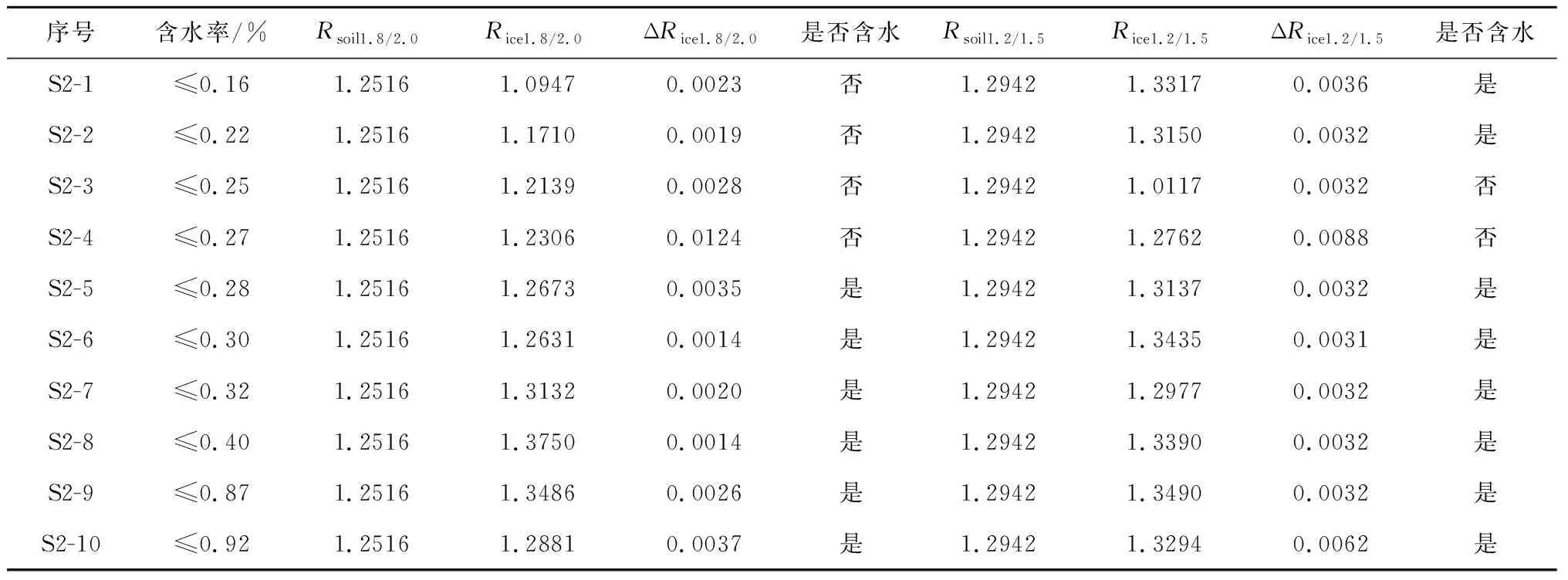
表3 传感器检测限测试数据(S2)Table 3 Test data of the sensor detection limits (S2)
4.4 检测范围验证试验
为验证传感器检测范围,设计了基于红外相机的检测范围测量系统,如图10所示。试验时将传感器镜头与漫反射板的距离调整为500 mm,并利用传感器照射带有刻度线的漫反射板,通过红外相机对漫反射板位置成像,即可同时看到刻度线和光斑的像,测试结果如图11所示,传感器在500 mm处的探测光斑约为5 cm,符合设计预期。
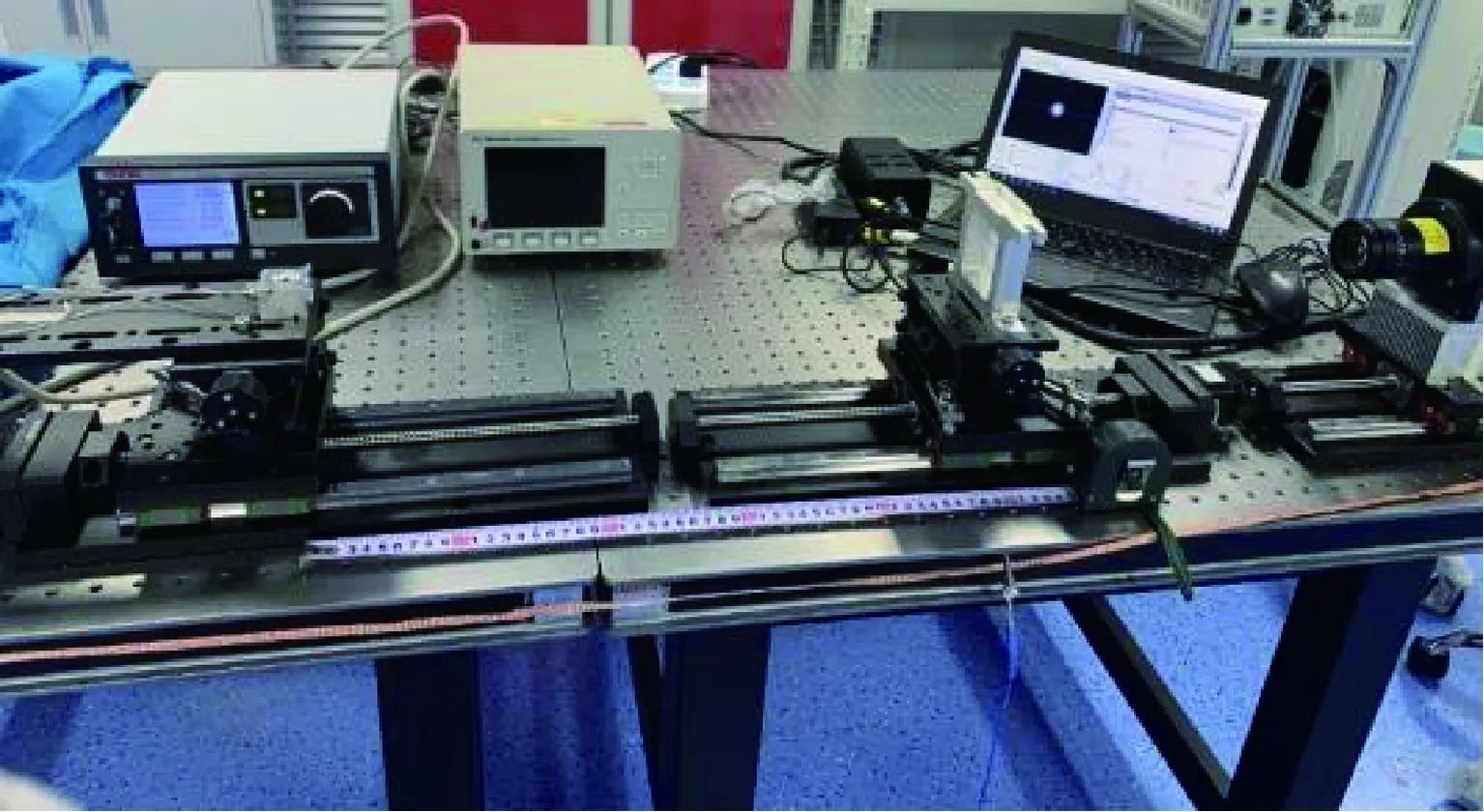
图10 传感器检测范围验证试验Fig.10 Verification test of the sensor detection range
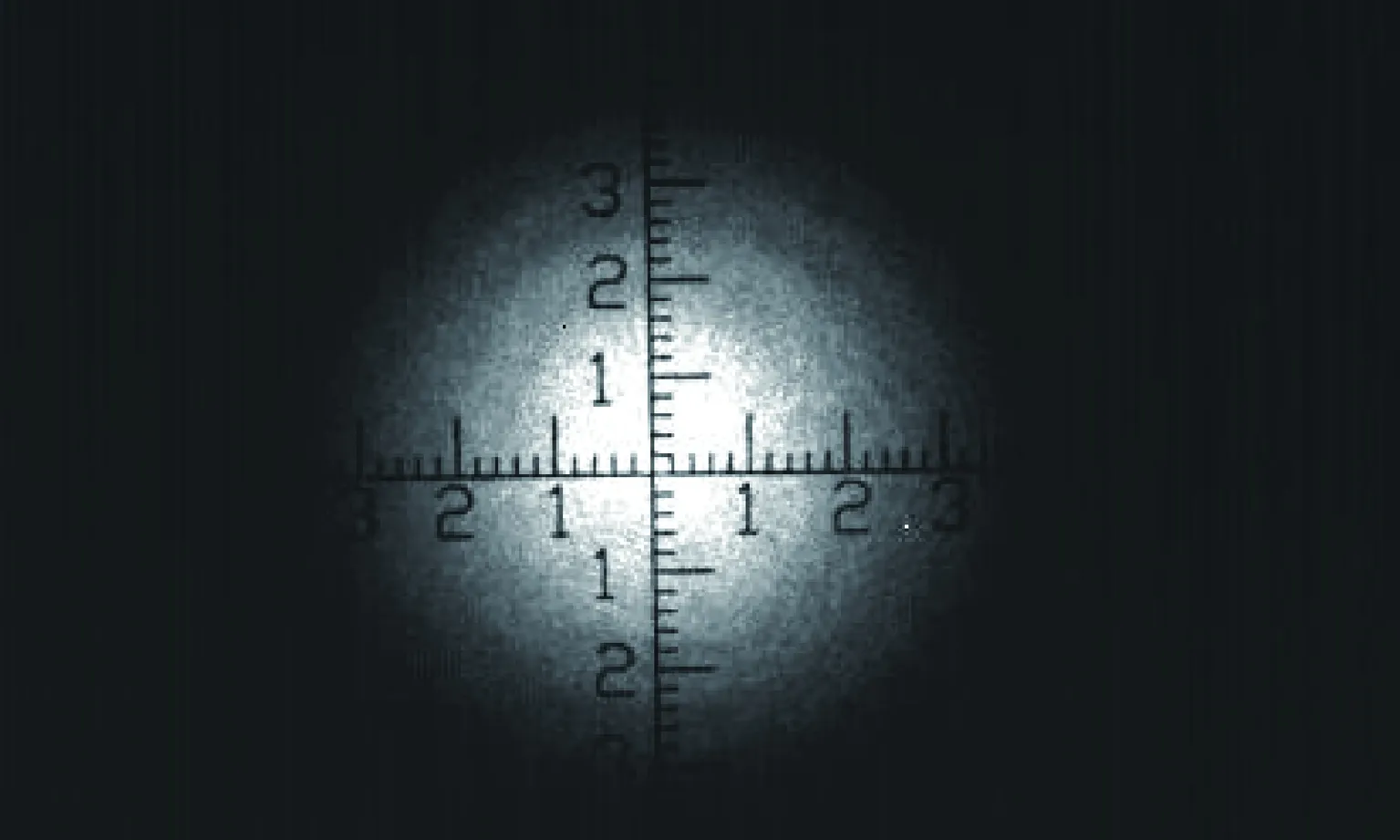
图11 检测范围试验结果Fig.11 The result of the detection range test
5 结 论
本文在对月球极区永久阴影坑采样探测任务需求、极区月壤赋存形式及其基本物理特性、水冰原位探测技术现状等进行分析的基础上,结合月球极区永久阴影坑采样探测总体方案,对基于红外光谱探测技术的极区月壤含水特性原位快速预判技术进行研究,设计并研制了基于红外光谱的水冰预判传感器工程样机。基于制备的两类多组低含水率模拟月壤水冰样品,开展了模拟月壤水冰原位快速预判专项试验及传感器检测限与检测范围验证试验。试验结果表明:本文设计研制的小型水冰预判传感器对地面模拟月壤水冰的检测限可达0.39%,单次检测时间可优于1 s,探测光斑直径@检测距离为5 cm@500 mm;经试验验证,采用多模红外光谱对月壤水冰进行原位快速预判的技术方案可行。
猜你喜欢
东坡赤壁诗词(2022年4期)2022-10-30
军事文摘(2022年18期)2022-10-14
小哥白尼(趣味科学)(2022年6期)2022-08-17
汽车工程师(2021年12期)2022-01-18
今日农业(2021年4期)2021-06-09
青少年科技博览(中学版)(2021年11期)2021-03-07
进出口经理人(2021年8期)2021-02-12
出版人(2020年5期)2020-11-17
北京航空航天大学学报(2020年10期)2020-11-14
文萃报·周二版(2019年3期)2019-09-10