
液压驱动侧移式割草机设计
2022-11-18 03:01于洋张秀花杨云磊王雷
河北农机 2022年9期
于洋 张秀花 杨云磊 王雷
1、河北农业大学机电工程学院 2、河北农垚科技有限公司
前言
近年来,现代果园生草刈割技术相较于传统的“清耕制”优势日益显著。果园生草刈割技术,不仅能够改善土壤结构,增加孔隙度,降低土壤容重,还可以增加土壤水分的入渗能力和持水能力,减少土壤发生板结的可能性[1-2]。刈割覆盖后各土层的温度差较小,升、降温趋势平缓,地表的日蒸发量增加,空气相对湿度和CO2浓度降低,热量向深层土壤的传递速度下降,土壤的热量获得均匀,有利于平稳地温。土壤中N、K、P存在移动性,会影响土壤水分的蒸发和团粒结构的形成[3-5],同时,适当的刈割可以对地表周围草域的生态因子乃至果园微环境进行调控;在多雨季节,刈割可使近地表草域温度提高、空气流动加强,地表蒸发量增加,从而降低了土壤含水量,改善土壤透气性,为根系的生长提供适宜的环境[6-9]。
我国大力提倡果园生草栽培技术并取得了显著效果,机械化割草是控制杂草生长,提升生草技术的重要手段。目前主流的割草机是悬挂式割草机,由配套的拖拉机提供动力,割草效率高,但树下割草过程中树冠对拖拉机和驾驶员有干扰,能够自动调节侧置偏移量的树下割草机的设计是一个难题。
针对上述问题,本文在悬挂式割草机的基础上设计了一种液压驱动侧移式割草机,并对割草机悬挂架与液压单元进行了设计。该割草机可适用于不同列间距的果树下割草,将杂草割除并排至树干周围,对周围杂草层层叠压,达到了抑制树干周围杂草生长的效果。
1 总体设计
本文设计的割草机整机结构如图1所示,由壳体焊合部件、悬挂架、液压缸、导向轴固定板、挡链板、变速箱、支撑板、地辊和导向轴等部分组成。液压驱动侧移式割草机割幅1600mm,采用双刀轴设计,刀片数4个,刀轴转速1500r/min,留茬高度70mm~100mm,液压缸型号HSG 40×25-400,总机质量300kg。

图1 整机结构图
本机悬挂架由一个上悬挂板和两个下悬挂板组成,三点悬挂安装在配套的拖拉机上。液压驱动侧移装置的液压缸缸筒端固定在机器壳体上,活塞杆端固定在悬挂架的液压推动板上,由拖拉机来供给压力油。通过传动轴将拖拉机输出轴和中心变速箱的输入轴连接起来,中心变速箱与两侧的变速箱相连接,两侧变速箱的输出轴与刀架连接,带动刀具旋转。拖拉机自身可以调控割草机的升降与旋转,作业前,确认留茬高度,将割草机调整到初始位置;作业时,由拖拉机输出动力,经变速箱变速,由输出轴带动割草刀进行割草作业;当经过树干时,液压缸工作,从而使割草机壳体和悬挂架进行相对运动,实现机体的侧移,完成避障作业。
2 刀具切割参数确定与仿真分析
2.1 刀具切割参数确定
研究资料表明,杂草茎秆在无支撑切割时,切割刀片根部刃口处的最低速度为30m/s。在杂草切割过程中,其刀片根部刃口速度一般选用55m/s~80m/s,所以旋转式割草机的切割速度为60m/s~90m/s,维持刀片的稳定工作。刀片刃线部分所扫过的面积为余摆带,摆带带宽与片刃部宽度相当,刀片上任一点的速度均由刀片随切割圆盘的圆周速度与机器前进速度合成,如图2所示,故任一瞬间刀片刃口的绝对速度为

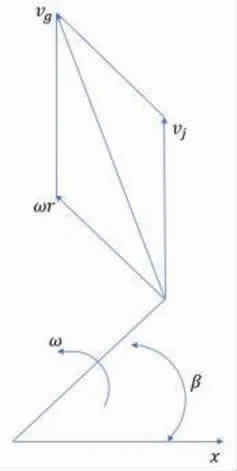
图2 切割速度分析
当ωt+β=π+2kπ(k=1,2,3…,n)时

式中:vg——刀片刃口速度,m/s;
vgmin——刀片刃口最小速度,m/s;
r——刀片内端半径,取r=162mm;
ω——刀盘角速度,rad/s;
vj——机器前进速度,约为5km/h;
β——刀片端点与刀架的连线夹角。
因此,割草机刀架转速为

式中n——刀架转速,取1500r/min
根据资料[12]可知,不漏割条件为
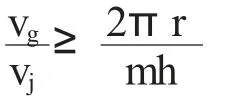
式中h——刀片工作刃线长度,137.5mm;
m——刀片数,取m=2。
带入数据可知,该设备可保证割草时不产生漏割。
2.2 刀片运动学仿真
为了分析割草机刀片的运动状态,对工作状态下刀片进行了仿真模拟。首先,利用三维建模软件Solidworks构建机械系统的三维模型,之后将建立的模型导入ADAMS/View中,从而建立虚拟样机仿真模型并进行研究。
侧移式树下割草机切割器主要由刀架、割刀旋转套、割刀和割刀下连接板等组成;割草作业过程中,输出轴旋转带动刀架运动,使得位于刀架和割刀下连接板上的割刀在离心力的作用下被甩出,从而达到对杂草进行切割的效果。
2.2.1 三维模型导入
割草机的实体建模包括零件建模和整体装配,运用Solidworks的参数化设计功能建立各零部件三维实体模型,对切割器进行单体虚拟约束装配,完成虚拟样机设计,所得模型如图3所示。
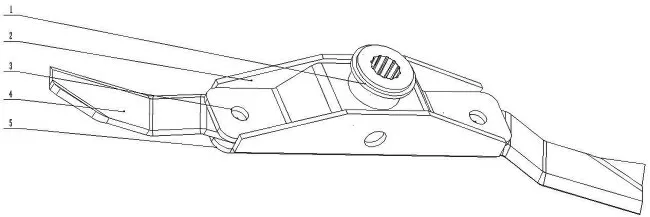
图3 切割器装配图
2.2.2 切割器刀片的仿真运动轨迹
在ADAMS/View中,选取刀盘转速n=1500r/min,机器前进速度vj=5km/h,在割草机刀片上选取一点并进行轨迹分析,如图4所示。
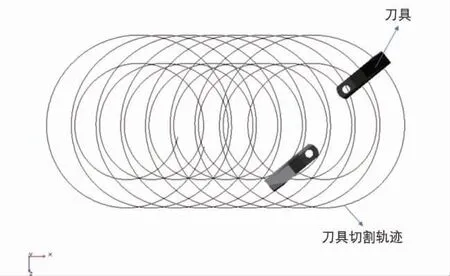
图4 刀片运动轨迹图
由图4得知,机器在前进过程中,切割器刀片上任一点的运动轨迹为余摆线。整个刀片运动扫过的面积为余摆带,4个刀片覆盖整个割幅。
2.2.3 刀片切割速度分析
为得出在割草机刀片上一点的速度变化规律,在ADAMS/View软件中对刀片上选取点进行运动仿真分析;其中设置刀盘转速n=1500r/min,机器前进速度vj=5km/h,仿真时间为0.1s,得出在x轴自转方向、z轴行走方向上的仿真结果分别如图5、图6所示。

图5 刀片在X轴方向上的速度变化图
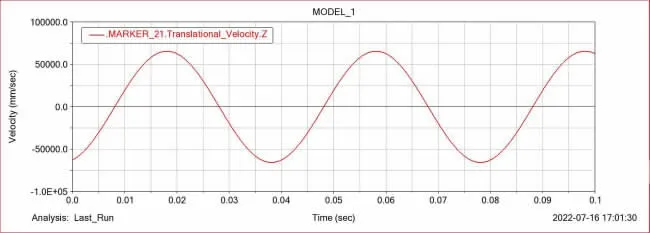
图6 刀片在Z轴方向上的速度变化图
刀片上任意一点速度为该点在x轴自转方向、z轴行走方向上速度合成,因此对合成结果进行仿真分析,得到其速度变化规律如图7所示。由速度分析得知,该点的切割速度范围为64.2~67 m/s,且切割速度随时间呈现波纹式状态,速度变化幅度基本稳定,满足工作要求。
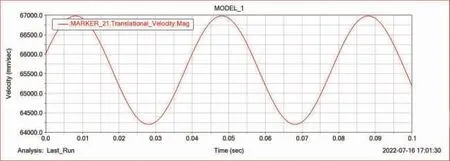
图7 刀片切割速度图
3 悬挂架设计
3.1 结构设计
割草机悬挂架整体结构如图8所示,由支撑梁、悬挂板、液压推动板、后斜梁和后斜梁连接套组成。

图8 悬挂架整体结构
上悬挂板焊接在支撑梁横梁上且与拖拉机的上悬挂轴相连接,拖拉机的上悬挂轴正下方是拖拉机的输出轴,故为使工作中万向节传动轴的工作轴线折角尽可能小,应使两上悬挂板的中心尽量靠近变速箱输入轴。悬挂架的支撑梁采取龙门架设计,相较于传统的直板式设计,龙门架的强度更大,并且在进行侧移时给传动轴留出更大的空间,对传动轴的干涉更小。液压推动板与内侧下悬挂板焊接在一起,上面焊有连接套,其作用是与液压缸推动杆相连接,并使其定位,使悬挂架与机体实现相对运动。下悬挂板焊接在支撑梁竖梁上,其作用是用于连接滑动套筒和拖拉机的下悬挂轴。后斜梁焊接在支撑梁横梁的内侧,其作用是通过与后斜梁连接套焊接后连接后导向轴,同时悬挂架整体三角式结构使割草机在工作时更加稳定。
根据割草机的实际使用情况,割草机的悬挂架应具有足够的承载能力、足够的强度和刚度。经市场调研,选定高碳钢作为悬挂架的材料。
依据拖拉机后悬挂的实际尺寸和果园实地调研获得的数据,首先确定割草机的基本尺寸如表1所示。

表1 割草机基本尺寸
悬挂架的尺寸主要取决于割草机的基本轮廓尺寸和最大偏移量。因为悬挂架要承载整个割草机的重量,故将截面设计成空心矩形管,矩形管管外边尺寸为80mm×60mm×5mm的矩形空心管;另一方面为了在工作时不影响传动轴的转动,支撑梁内侧的长度设计为646mm;由拖拉机后悬挂的高度,将支撑梁的高度设计为723mm。
后斜梁也采用同型号矩形管,其尺寸根据两导向轴的中心距来设计,展开长度为1368mm。上悬挂板的厚度为10mm,两悬挂板中心与支撑梁横梁中心重合。下悬挂板厚度为10mm,上面开有直径为70mm的轴套孔;液压推动板长670mm,宽54.58mm,厚10mm。
3.2 静力学分析
为校核悬挂架的强度和刚度,采用Solidworks对悬挂架三维建模,通过ANSYS软件对悬挂架进行了静力学分析[10]。割草机整体重300kg,故先对悬挂板施加固定约束,然后对悬挂架施加竖直向下的300kg重力,静力学应力分析结果如图9所示。由图可知悬挂架的最大应力在悬挂板固定处,其值为24MPa;静力学变形分析结果如图10所示,由图可知悬挂架的最大变形处在后斜梁的竖梁和后斜梁连接套焊接处,其变形量为0.2613mm,满足割草机工作需求。
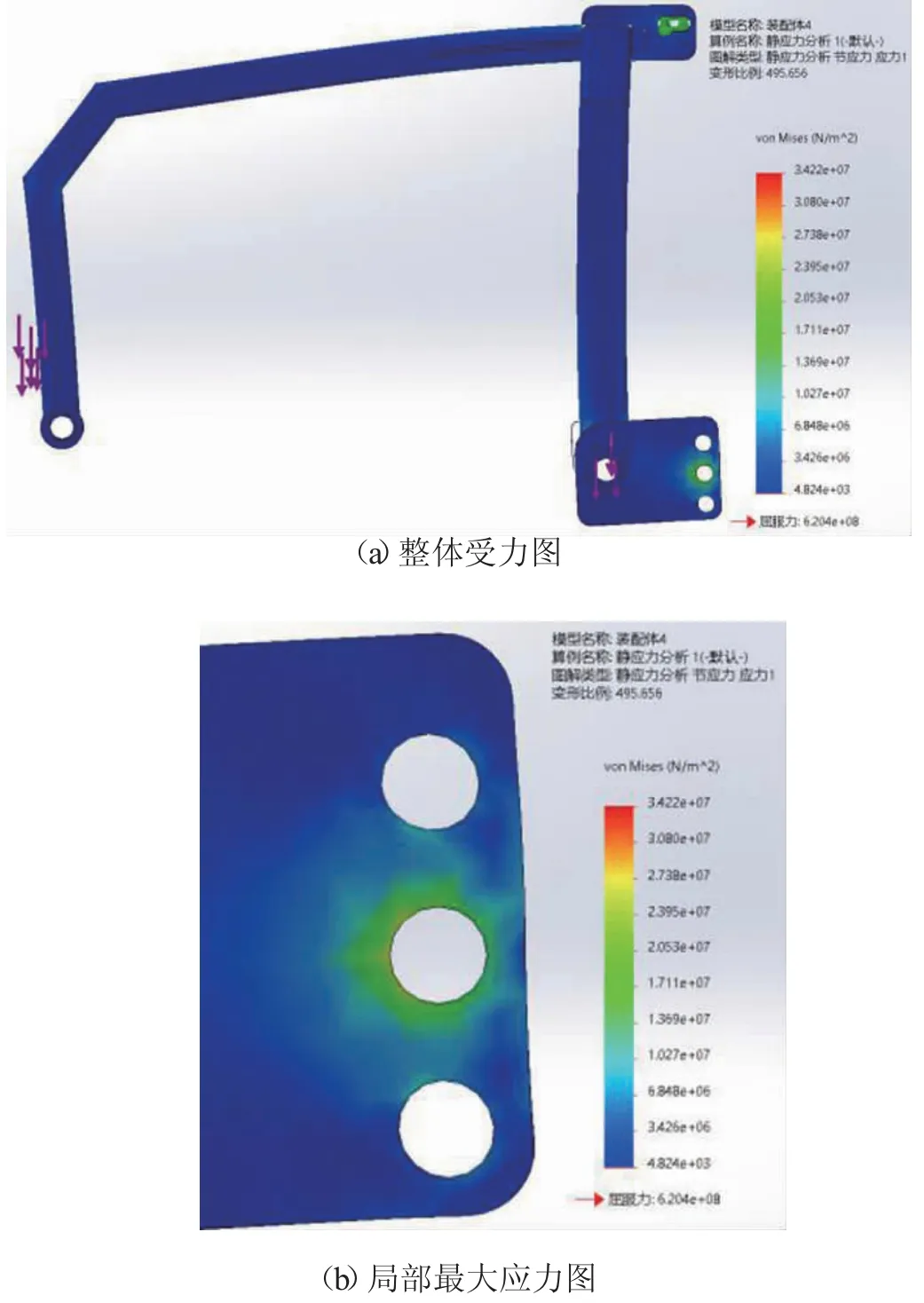
图9 悬挂架静力学应力分析

图10 悬挂架静力学变形分析
4 液压驱动系统设计
本割草机采用单液压缸双滑动导轨设计,包括:前导向轴、导向轴固定板加强版、导向轴固定板、导向轴固定板套管、后导向轴、液压缸、油缸座挡板,如图11所示。导向轴固定板焊接在槽钢上,导向轴固定板加强版通过焊接分别与槽钢和导向轴固定板相连接,导向轴固定板套管嵌入到导向轴固定板中,并通过焊接固定,前导向轴穿过铜套和导向轴固定板套管并通过开口销固定在导向轴固定板套管中,后导向轴穿过铜套和支撑板套管并通过开口销固定在支撑板套管中,油缸座挡板固定在机器面板上,液压缸缸筒端通过螺栓固定在油缸座挡板上,液压缸活塞杆端通过螺栓固定在支撑梁加强板上。
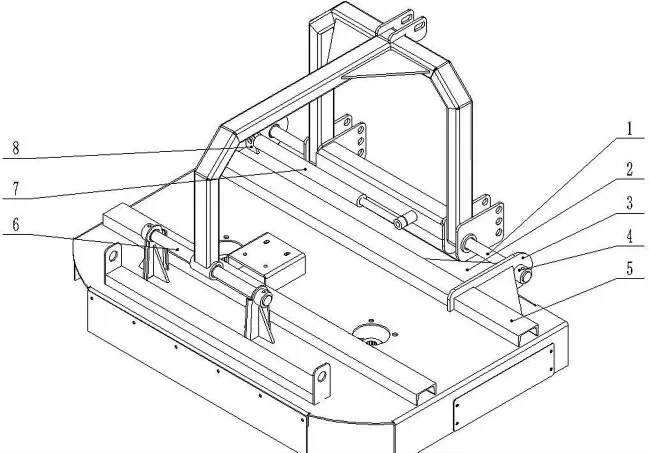
图11 液压驱动系统
4.1 液压缸型号选择
液压驱动侧移式割草机液压缸的选取要根据所需求的侧移量来确定。要求侧移量为400mm,并且由于液压缸缸筒与机器壳体连接,活塞杆与悬挂架连接,故要求液压缸的推力与拉力要大于整机重量。故本机所采用的液压缸为HSG40电镀铬液压缸,油缸外径50mm,内径40mm,活塞杆直径为25mm,行程为400mm,额定推力20966N,额定拉力12300N。从经济性和实用性方面考虑,满足设计需求。
4.2 液压驱动刚体动力学仿真
选定液压缸后,为确定液压侧移执行装置的运动情况,故通过ANSYS软件对液压侧移执行装置进行刚体动力学分析。将液压偏置执行装置的模型导入ANSYS,赋予所有零件质量信息;对导向轴添加固定约束,在滑套和悬挂架之间添加固定约束,在滑套和导向轴之间添加单向移动约束,从而使悬挂架可在导向轴上滑动。在活塞杆和液压推动板连接套之间添加固定约束,在油缸和活塞杆之间添加移动副载荷,使油缸相对于活塞杆反向运动400mm,从而使液压杆可以带动悬挂架移动。运动截图如图12所示,运动过程平稳无震动,满足设计需求。
5 实地实验
为了验证设计方案的合理性,试制了液压驱动侧移式割草机。试验于2022年9月25日在河北省保定市阜平县红草河基地的一处果园地进行,选择一段较为平坦的路面(图13),行距4m,株距1m~1.2m。图13(a)、(b)分别展示了液压侧移装置处于最小偏置量0mm(不偏置)和最大偏置量400mm下的位姿。试验结果表明本文所述的液压侧移装置可实现割草机偏置量的自动调节改变,割草效果良好,可实现果树树下割草。
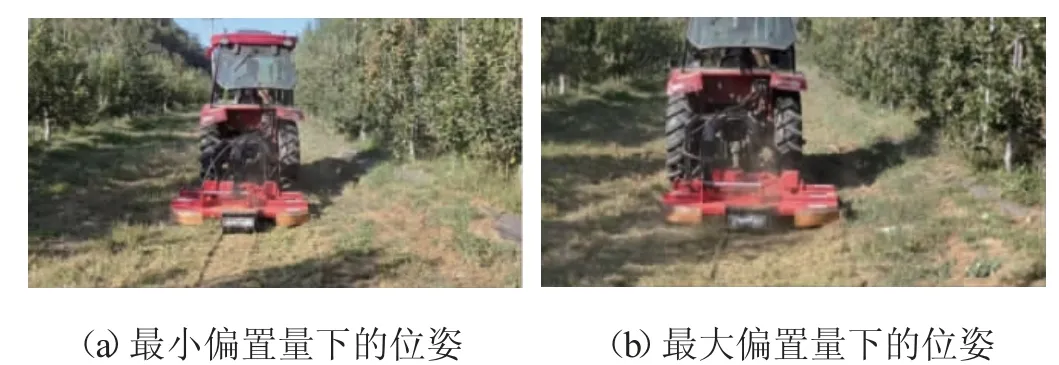
图13 液压侧移装置处于最小偏置量和最大偏置量下的位姿
6 结论
本文为解决树下割草过程中树冠对拖拉机和驾驶员的干扰问题,设计了一种液压驱动侧移式割草机,能够自动调节侧置偏移量,清除树干周围杂草。
(1)割草机采用双刀轴设计,刀片数4个,刀轴转速1500r/min;悬挂架的材料使用高碳钢,使其在承重300kg的情况下,应力与变形满足工作需求。
(2)液压缸作为液压侧移装置的主动件,由拖拉机提供液压油,使机器壳体与悬挂架做相对运动,从而实现割草机的侧移。
(3)试制出悬挂液压侧移装置并装载到割草机上,进行了实地测试,达到了试验标准,效果良好。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
沈阳理工大学学报(2022年3期)2022-08-11
中国信息化(2022年5期)2022-06-13
民间故事选刊·上(2022年4期)2022-04-17
民间故事选刊(2022年7期)2022-04-15
时代文学·上半月(2019年6期)2019-12-13
环球时报(2019-06-11)2019-06-11
流体机械(2017年9期)2017-02-06
北京航空航天大学学报(2016年6期)2016-11-16
中国新技术新产品(2014年21期)2014-03-28
