
磁力爬柱机器人结构设计与运动分析
2022-11-21 06:48王战中杜启鑫张明亮
机械设计与制造 2022年11期
王战中,赵 童,杜启鑫,张明亮
(1.石家庄铁道大学机械工程学院,河北 石家庄 050043;2.张家口职业技术学院,河北 张家口 076450)
1 引言
随着我国经济发展越来越快,高速铁路越来越发达,目前正在营运的高铁站房大约有五百多座,约有八万多根雨棚金属支柱需要检测和维护,许多车站的雨棚金属支柱表面由于环境的原因已经出现了不同类型的损坏,这为高铁运营带来较大的安全隐患。目前,还没有相关的自动检测设备,高铁站只能靠人工去完成雨棚金属支柱的检测与维护[1-2]。因此,开发一套机器人检测设备有助于提高工作效率,减少人工劳动强度[3-5]。
在爬柱机器人方面,文献[6]提出一种永磁吸附轮式爬壁机器人,该机器人由两个驱动轮、四个辅助支撑轮与永磁吸附装置组成,采用差动方式转向,但是该机器人的工作间隙不能调节,并且由于磁吸附力的限制,越障能力非常小,不能满足高铁站金属支柱表面检测的作业要求。文献[7]提出一种变磁力履带式移动平台,该机器人虽然可以通过磁吸附力的改变来减小运动阻力,但是在转向时履带上永磁铁块与壁面之间的磁吸附力不能改变,致使转向阻力增大,所以该机器人的转向能力较差。文献[8]提出一种新型变磁力轮式爬壁机器人,该机器人的磁吸附装置可通过电机带动齿轮在平行壁面方向上做圆周运动,从而改变工作间隙,实现磁吸附力的调节,但是该机器人不能实现原地转向并且由于越障能力的限制,工作效率会大大降低。文献[9]提出一种丝杠移动型爬杆机器人,该机器人由两个支撑架、丝杠螺母、两个机械手组成,需要由机械手夹紧支柱来实现攀爬动作,因此该机器人不能适应于不同直径的金属支柱。文献[10]提出一种双手爪式爬柱机器人,该机器人设计了具有首尾对称结构的五自由度双手爪式仿生攀爬机器人模型。但是随着金属支柱的直径增大,机器人的手爪将会增大,因此该机器人不适合在大直径金属支柱上作业。文献[11]提出一种适应不同导杆直径的多姿态爬杆机器人,该机器人使用六角支架、直径部件等结构组成,虽然该机器人可以在一定范围内适应直径不同的导杆,但是随着杆件的直径增加,机器人的刚度将会减小,并且在维护金属支柱时效率低下。
综上所述,目前关于爬柱机器人的研究大都不能在支柱上实现灵活变向、调节工作间隙且不能适应不同直径的支柱与越障能力较低,针对此不足,这里基于高铁站雨棚金属支柱,使用Solidworks软件建立了磁力吸附爬柱机器人模型并运用Adams软件对机器人的前进后退、90°转向与调节工作间隙等动作进行仿真分析,最终确定了合理的工作间隙范围与磁吸附力范围。
2 机械结构设计
2.1 机器人设计技术指标
(1)机器人越障能力可达20mm。(2)机器人自重小于等于60kg。(3)机器人负载能力小于等于20kg。(4)适用于直径为(600~800)mm的金属支柱。
2.2 总体布局
该磁力吸附爬柱机器人左右两侧分别有两个驱动轮与两个转向电机驱动的转向机构,每个转向机构带有一个驱动轮,以便在实现90°转向后可围绕金属支柱沿圆周方向行走。中间是由永磁铁块、弧形轭铁与丝杠螺母组成的磁吸附装置,丝杠螺母机构用来调节工作间隙(永磁铁块到支柱表面的距离),以便机器人正常工作。机器人三维模型,如图1所示。

图1 磁力吸附爬柱机器人三维结构Fig.1 Three Dimensional Structure of Magnetic Adsorption Climbing Robot
2.3 磁吸附装置设计
该装置包含导轨、丝杠螺母机构与带有永磁铁块的弧形轭铁。驱动电机通过驱动固定在螺母上的从动锥齿轮使丝杠上下运动,从而调节工作间隙到合适值,使该机器人正常工作。磁吸附装置三维模型图,如图2所示。
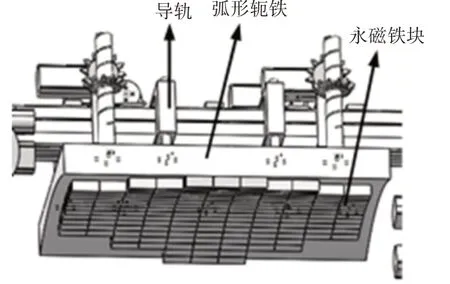
图2 磁吸附装置模型图Fig.2 Model of Magnetic Adsorption Device
2.4 直角转向机构设计
90°转向机构的工作原理为:在需要转向时机器人停止运动,转向电机使驱动轮向外转过90°,之后机器人可围绕支柱沿圆周行走。90°转向机构结构模型,如图3所示。

图3 90°转向机构Fig.3 90° Steering Mechanism
3 静力学分析
3.1 摩擦力分析
(1)机器人静止时要保证机器人在金属支柱上不向下滑移。机器人在静止状态的受力图,如图4所示。
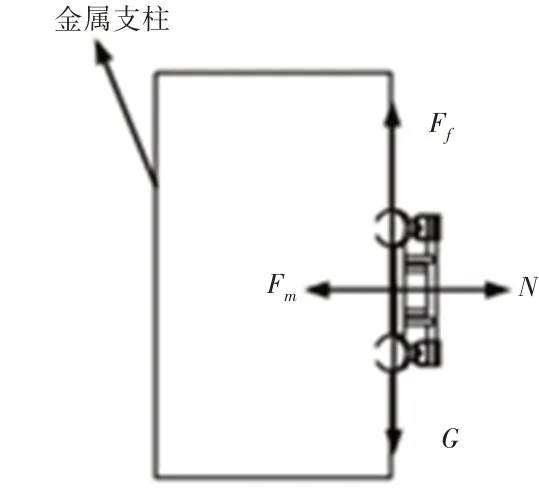
图4 机器人静止状态受力分析Fig.4 Force Analysis of Robot in Static State

式中:N—支持力;Fm—磁吸附力;μ—轮子与壁面摩擦系数,取为0.6;Ff—摩擦力;G—机器人的重力。
在Solidworks软件中为机器人各零件添加相应的材料属性,并计算出机器人的自身重量G约为60kg,如图5所示。由于机器人所带的负载不大于20kg,所以将机器人的重量记为80kg,由式(1)~式(3)可算出机器人静止所需要的磁吸附力约为1350N。出于安全考虑将磁吸附力增大到1700N。
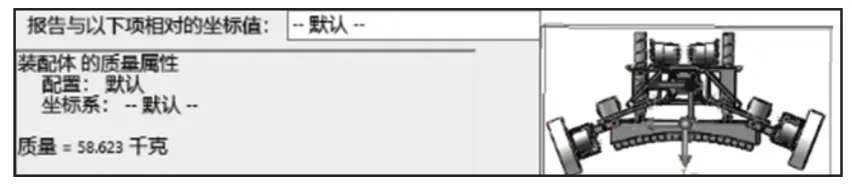
图5 机器人自重Fig.5 Dead Weight of Robot
(2)磁力吸附爬柱机器人在金属支柱表面上正常行走时不能发生滑移现象,并且驱动电机驱动车轮克服摩擦力。正常行走受力分析,如图6所示。根据式(4)~式(13)可得出机器人正常行走所需要的磁吸附力。

图6 正常行走受力分析Fig.6 Force Analysis of Normal Walking

式中:Fn1、Fn2、Fn3、Fn4—车轮与壁面的实际支持力;N1、N2、N3、N4—法向支持力;Fm—磁吸附力;Fa—牵引力;Ff1、Ff2、Ff3、Ff4—四个车轮与壁面的摩擦力;μ1—车轮与壁面的摩擦系数,取为0.6。
由式(4)~式(13)计算可得正常行走所需的磁吸附力约为3050N。同样,出于安全考虑,取正常行走时安全系数为1.13,对应的磁吸附力将增大到3400N。
3.2 磁吸附力计算
使用40块(6x4x2.5cm)牌号为35的钕铁硼永磁铁来制作磁吸附装置,将其按Halbacch 弧形阵列布局,5 块Halbach 弧形阵列模型,如图7所示。其中,箭头方向表示磁化方向。
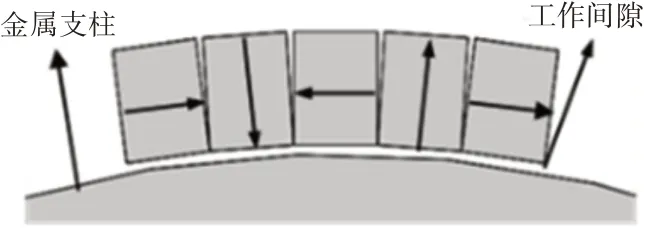
图7 5块Halbach弧形阵列模型Fig.7 5 Halbach Arc Array Model
Halbach永磁体弧形阵列的磁吸附力可由下式得出[12]:

式中:a—永磁体长度;b—永磁体宽度;μ0—空气导磁率;L—工作间隙;k—周波数;Br—永磁体的剩余磁感应强度;d—永磁体厚度。
由式(14)可知:只要永磁铁材料确定,剩余磁感应强度也就确定。又由于该装置采用大小为(6×4×2.5)cm的永磁铁,因此永磁铁的体积也已知,所以工作间隙的长度是影响磁吸附力的主要因素,工作间隙越大,磁吸附力越小。将此吸附装置在Ansoft 软件中进行有限元仿真分析,得到的磁吸附力,如表1所示。使用Origin软件绘制成曲线图,如图8所示。
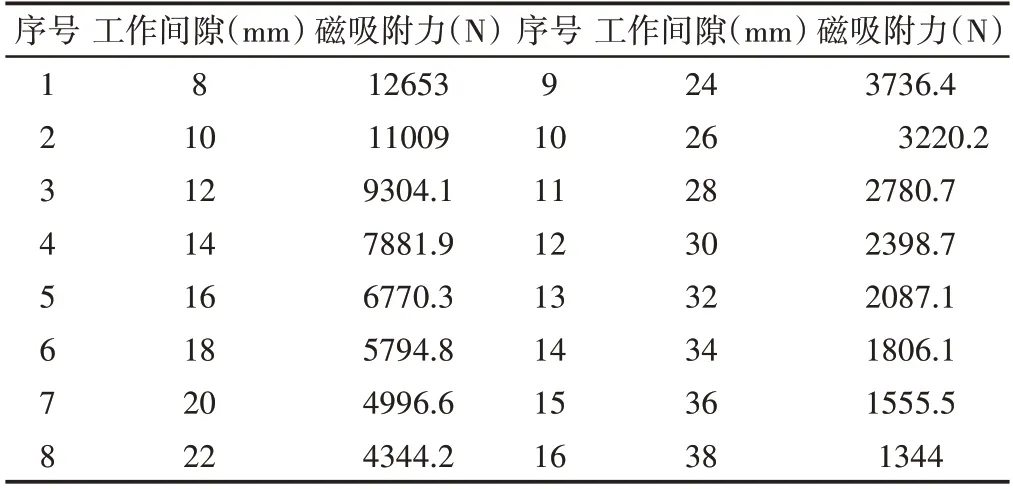
表1 40块Halbach弧形阵列的永磁铁磁吸附力Tab.1 Permanent Magnet Magnetic Adsorption Capacity of 40 Halbach Arc Arrays
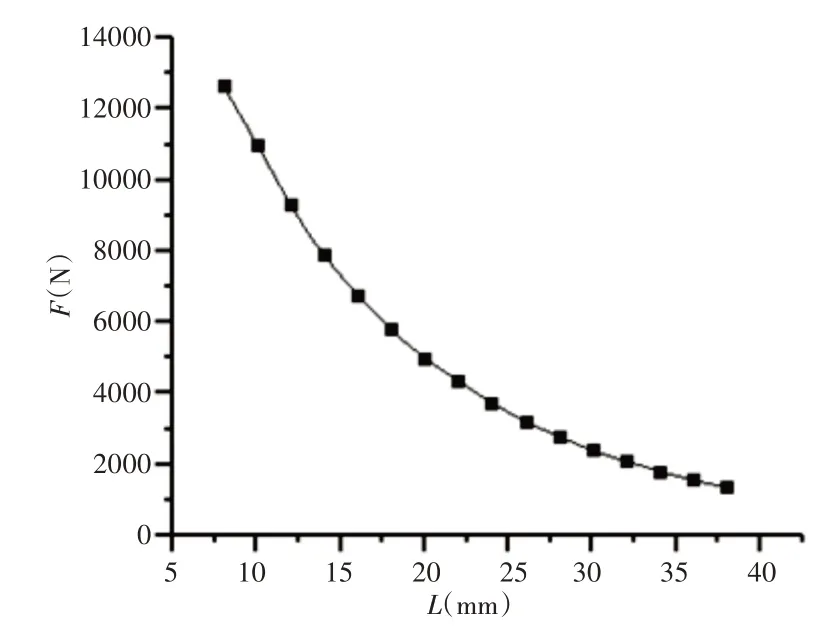
图8 不同工作间隙下的磁吸附力曲线图Fig.8 Curve of Magnetic Adsorption Force Under Different Working Gaps
由图8可看出,随着工作间隙的增大磁吸附力在逐渐减小,符合式(14)反应的趋势。由表1 可知,当工作间隙为24mm 与34mm时,对应的磁吸附力分别是3736.4N与1806.1N,可满足机器人的设计指标与工作要求。当工作间隙小于24mm时,磁吸附力在4000N以上,这将导致摩擦力增大,相应的对驱动电机的功率和机器人整体刚度要求也要增大;如果工作间隙大于34mm,磁吸附力在1500N以下,这将不能保证机器人作业的安全性。因此工作间隙定为24mm与34mm。
4 运动学分析
4.1 运动过程的磁吸附力分析
按照第3节得出的结论运用Adams软件[13]对其进行运动学仿真,仿真时间设为29s,步长为100。未调节工作间隙时磁吸附装置质心到支柱所在轴线距离的曲线图,如图9所示。金属支柱直径为600mm,轭铁厚度为12mm。如图9所示,(3~9)s处于正常行走状态,工作间隙在24mm左右(355-300-25-6)。(9~10)s爬柱机器人处于90°转向状态,工作间隙变小,(10~22)s爬柱机器人围绕柱子行走,工作间隙大约在8mm附近。(22~23)s爬柱机器人第二次90°转向,(24~26)s处于正常行走状态,工作间隙在24mm左右。由图9可知,在第一次90°转向之后绕着支柱圆周运动时,工作间隙为8mm 左右,此时对应的磁吸附力大约在12653N左右。由于磁吸附力太大,对电机与机器人整体刚度要求会增大很多。为此,采用增大工作间隙降低磁吸附力的方法来降低这种影响。调节工作间隙后的磁吸附装置质心到支柱所在轴线的距离曲线图,如图10 所示,从图中可以看出,在爬柱机器人两次90°转向时,很短时间内工作间隙就调整到24mm左右,以保证磁吸附力的稳定性和爬柱机器人正常的行走性能。
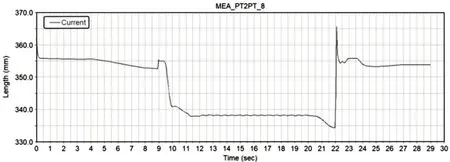
图9 磁吸附装置质心到支柱所在轴线的距离(调节工作间隙前)Fig.9 Distance Between the Mass Center of the Magnetic Adsorption Device and the Axis of the Pillar(before Adjusting the Working Clearance)
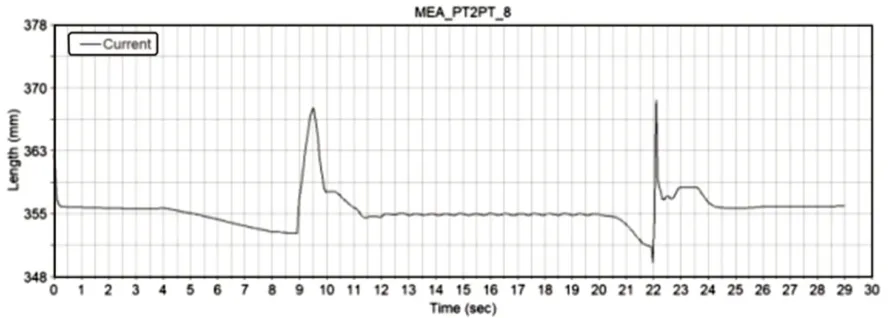
图10 磁吸附装置质心到支柱所在轴线的距离(调节工作间隙后)Fig.10 Distance Between the Mass Center of the Magnetic Adsorption Device and the Axis of the Pillar(after Adjusting the Working Clearance)
调节工作间隙后对应的磁吸附力曲线图,如图11所示。9s开始90°转向时,将工作间隙加大到34mm左右,此时对应的磁吸附力为1800N左右,能够保证机器人吸附在金属支柱上,90°转向完成后,工作间隙又调整为24mm 左右,对应的磁吸附力在3736.1N 左右,能保证爬柱机器人绕支柱圆周行走。第二次转向采用同样方法保证工作间隙在24mm 左右,使磁吸附力保证在3736.1N 左右。这样,无论在爬柱机器人沿金属支柱上下行走,还是绕金属支柱圆周行走,40 块(单块体积为(6×4×2.5)cm永磁铁Halbach 弧形阵列作为磁吸附装置都能够保证爬柱机器人安全运行。
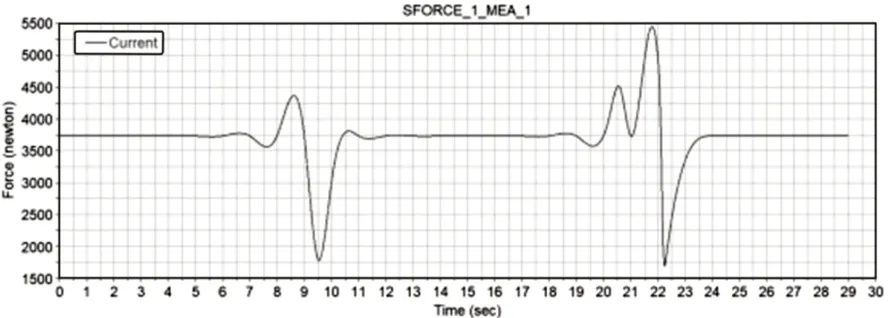
图11 调节工作间隙后对应的磁吸附力图Fig.11 Corresponding Magnetic Adsorption Diagram after Adjusting the Working Gap
4.2 运动过程分析
坐标系设置,如图12所示。机器人的运动过程可描述为:机器人首先在支柱上静止3s,然后沿Z正方向行走4s,之后实现第一次90°转向并围绕支柱行走180°后实现第二次转向,最后沿Z负方向行走。机器人运动过程中的Z向位移曲线图,如图13所示。从图13可看出,在(0~3)s时机器人静止不动,(4~8)s时机器人沿着Z轴正方向行走,位移曲线为倾斜的直线,即行走速度为常数,在(8~9)s机器人处于静止状态,为90°转向做准备,(9~10)s是第一次90°转向阶段,在该过程中由于轮子与支柱表面由面接触变为线接触导致摩擦力发生突变,引起图中的位移曲线发生了一定的变化。(11~20)s机器人在围绕金属支柱做圆周运动,位移曲线为水平直线即Z轴上的位移没有发生变化。(22~23)s机器人实现第二次90°转向,与第一次转向的变化趋势相同,(24~26)s机器人沿着Z轴负方向行走,由曲线可知机器人在做匀速运动。(26~29)s机器人处于静止状态。

图12 坐标系设置Fig.12 Coordinate System Setting
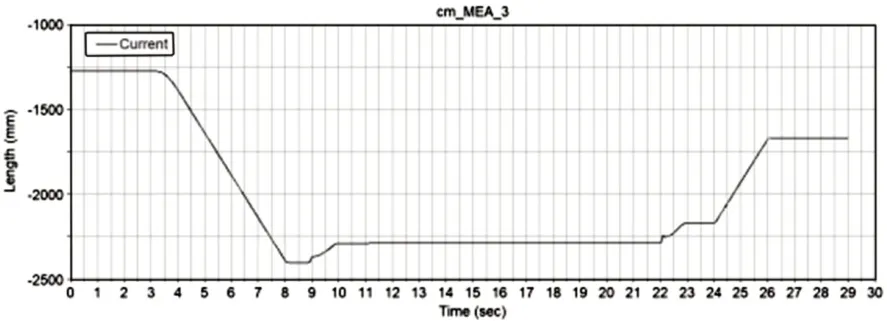
图13 机器人运动过程中的Z向位移曲线图Fig.13 Z-Direction Displacement Curve of the Robot During its Movement
5 实验研究
与石家庄某机器人公司合作制作样机一台并进行前行后退、90°转向等实验研究,如图14 所示。机器人正常行走速度为160mm/s。实验表明:(1)当工作间隙大于36mm时机器人会发生向下滑动,不能静止在支柱表面上。(2)机器人在正常行走时,测得的磁吸附力约为3750N,和仿真结果基本一致。(3)机器人在90°转向时,转向速度基本在30mm/s,可实现平稳转向。
6 结论
(1)针对高铁站雨棚金属,设计磁力爬柱机器人,分别介绍了机器人设计的技术指标,磁吸附装置以及90°转向机构。
(2)通过对机器人静止状态与行走状态受力分析,得出所需要的磁吸附力,采用40块(6×4×2.5)cm Halbach弧形阵列布局的永磁铁块制作磁吸附装置并通过数学模型得出工作间隙对磁吸附力有极大的影响。
(3)使用Adams软件与Ansys软件对磁力吸附爬柱机器人进行运动学仿真分析,并制作样机进行实验研究,证明其可行性。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
格言·校园版(2021年22期)2021-09-27
智慧少年·故事叮当(2021年3期)2021-06-29
初中生世界·七年级(2021年12期)2021-01-21
学苑创造·B版(2019年8期)2019-08-09
劳动保护(2018年8期)2018-09-12
少儿科学周刊·儿童版(2015年7期)2015-11-24
汽车电器(2014年8期)2014-02-28
