软衬硅橡胶表面仿树蛙足垫微阵列结构 对吸附力影响的体外研究
2022-11-25 07:16杨孟孟董梦璐李全利
口腔材料器械杂志 2022年4期
杨孟孟 董梦璐 李全利
(安徽医科大学口腔医学院,安徽医科大学附属口腔医院,安徽省口腔疾病研究中心实验室, 合肥 230032)
牙列缺失是临床常见病,会影响患者的咀嚼、发音、美观等功能。现阶段牙列缺失患者的主要治疗方案包括传统全口义齿和种植义齿,但是后者费用高,治疗周期长,而且要求骨量充足[1]。故对于费用受限或身体状况较差等的患者来说,传统全口义齿仍是第一选择。所以,如何改善牙槽嵴严重萎缩患者的全口义齿修复固位力,是义齿修复的重点和难点。
全口义齿的固位力与唾液的量和粘稠度、义齿基托与黏膜密合性、基托与黏膜的接触面积、边缘与黏膜形成的封闭性等相关[2]。目前临床提高义齿固位力的措施主要包括使用各种印模技术、提高义齿与黏膜的适合性、增加接触面积、提高边缘封闭性等[3]。相应的产品有BPS吸附性义齿、中性区义齿、全口义齿稳定剂等。但上述方法目前仍不能充分满足临床治疗的需要。
查阅文献发现,树蛙足垫的“湿粘接”机理似乎有应用于全口义齿的可能性。在干燥或是潮湿的环境中,树蛙均可以牢牢吸附在各种物体表面[4,5]。目前,树蛙足垫的仿生已应用于爬壁机器人、剃须刀、心电监测[6,7]等。但应用于全口义齿的研究尚未发现。Arthur C.Jermyn[8]曾将吸盘结构与全口义齿结合,制作出一种“吸盘义齿”。为了提高全口义齿的固位力,本研究仿照树蛙足垫的六棱柱状微图形结构,采用软衬硅橡胶材料,在其表面制作仿树蛙足垫微结构图形,评价其在模拟口腔环境中对吸附力的影响,为生物仿生吸附性全口义齿的制作提供实验基础,为全口义齿基托组织面的设计提供一种新思路。
1 材料和方法
1.1 材料与设备
软衬硅橡胶(Silagum-Comfort,SLC)(DMG公司,德国)、自凝牙托水和牙托粉(上海新世纪齿科材料有限公司)、光滑表面硅胶块(仿口腔咀嚼黏膜)、改良型SBF模拟体液(青岛捷世康生物科技有限公司)、微纳3D打印系统(NanoArch S130,深圳摩方新材科技有限公司)、扫描电子显微镜(ZEISS GeminiSEM 500,卡尔蔡司公司,德国)、岛津电子式万能试验机(岛津仪器(苏州)有限公司)。
1.2 方法
1.2.1 设计及分组 查阅文献资料[9],设计4组(A、B、C、D)不同参数的仿树蛙足垫微结构,即不同间隔分布的、不同边长和一定高度的六棱柱的微图形结构(图1a、b,表1),对照组E为表面无微结构的平面样片,图1c、d为与实验组相对应的反结构图形。
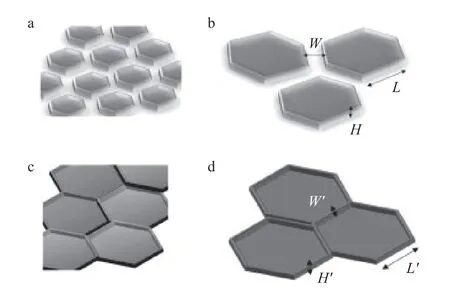
图1 仿树蛙足垫微结构及其反结构示意图
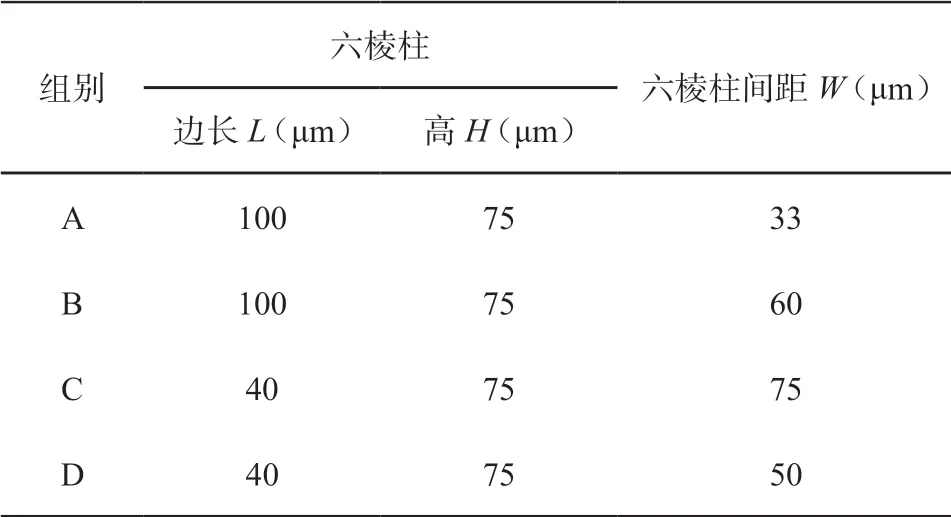
表1 4组不同尺寸的仿树蛙足垫微结构
1.2.2 3D打印反结构样片 按上述设置的4组微结构参数分别构建相应的反结构阴模(图1c、d,表1)3D模型(尺寸8 mm×8 mm×2 mm),输出STL文件,导入3D打印机,光敏树脂材料分层打印并固化,获得仿树蛙足垫微结构的阴模。SEM 进行形态学表征。
1.2.3 制备软衬硅橡胶样片 如图2所示,按比例调和牙托粉与牙托水,制作一定大小的自凝塑料块,室温固化后打磨、抛光、清洁。在其表面涂抹SLC软衬硅橡胶专用粘接剂,然后用注射枪将SLC软衬材料注射于自凝塑料块表面,材料固化前,将带有反结构的阴模样片轻轻按压至软衬材料表面,室温固化,脱模。将获得的硅橡胶片修整成8 mm×8 mm×2 mm大小的尺寸,确保翻制出来的模型厚薄均匀。获得表面含有仿树蛙足垫微结构的硅橡胶样片(A,B,C,D),以及无微图形的表面光滑的硅橡胶平面样片(E,阴性对照)。按上述方法制作A ~ E组样片各5个,用于后续吸附力测试实验。然后将自凝塑料块换成玻璃板,用同样的方法,A ~ D每组再各制作1个样片,用于后续SEM观察。评估其是否达到最初设计的形态及参数要求,包括尺寸变化、结构破损率等。样片制作流程见图2。
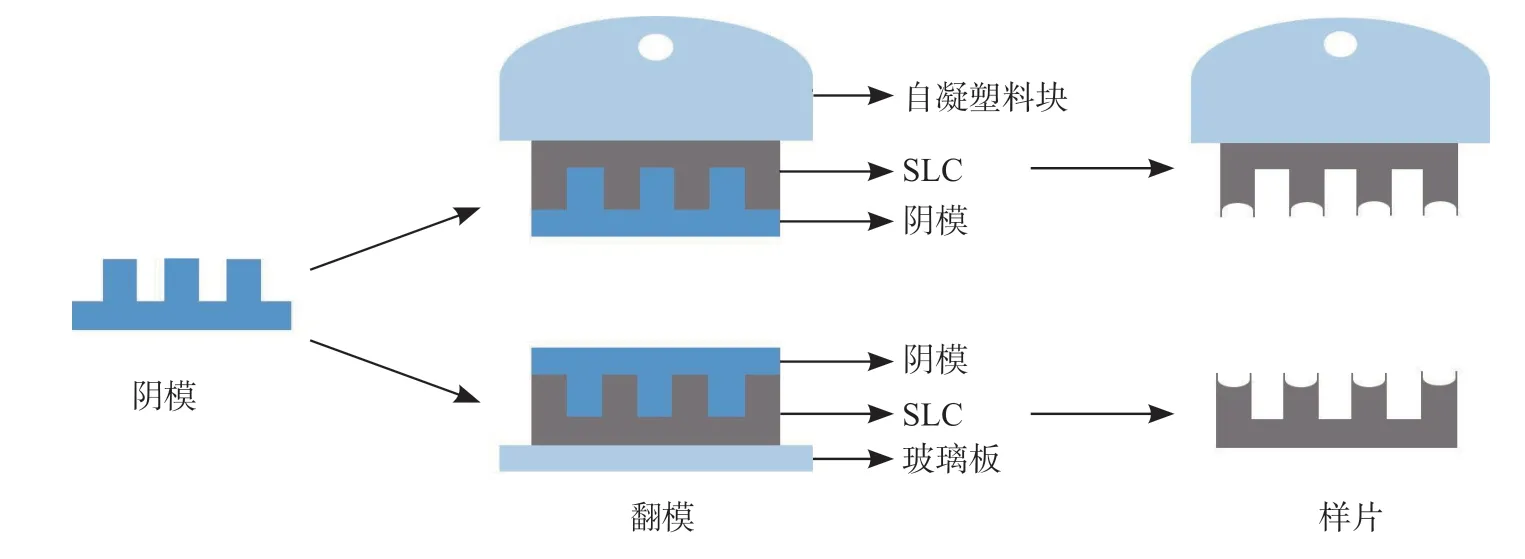
图2 微结构样片制作流程示意图
1.3 吸附力测试
用双面胶将硅胶块粘固在万能材料试验机的下夹具上,将带有样片的自凝塑料块悬挂固定于材料试验机的上夹具上,硅胶块表面涂抹薄层人工唾液(如图3)。调节试验机的横梁高度,使样片与硅胶块缓慢轻接触,然后施加(9.8±0.2)N的载荷力30 s,使样片吸附在硅胶块中央。然后以5 mm/min的速度分开,记录两者分开时的最大载荷值。按照上述拉伸实验方案,每个样片分别测试3次,得到吸附力数值。
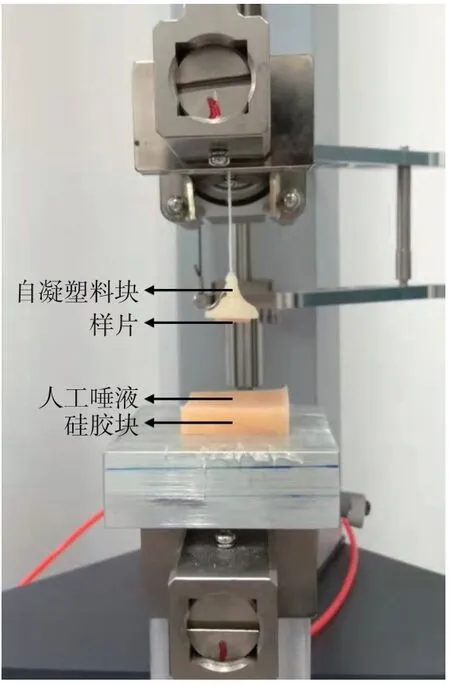
图3 吸附力测试示意图
1.4 统计学分析
采用SPSS 23.0软件进行统计分析。吸附力数据用±s形式表示,数据分析采用单因素方差分析(One-way ANOVA),组间两两比较采用SNK-q检验,P<0.05 表示差异具有统计学意义。
2 结果
2.1 SEM观察结果
图4显示3D打印仿树蛙足垫微结构的阴模样片,是凹进去的六棱柱结构,结构完整,未见明显破损。通过测量可得其微结构尺寸与预设的微结构尺寸差异约为2.72%。

图4 3D打印的阴模样片
图5显示SLC翻制的样片。可见其微结构形态与预先设计的基本一致,表面光滑完整,尺寸与预设的微结构尺寸差异约3%,横截面观察结构破损率不足10%,纵截面观察结构破损率约15%。右图可见柱子外边缘呈层叠条纹状。
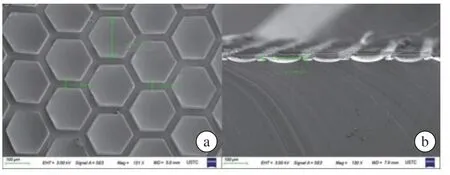
图5 SLC翻模后样片的SEM图像
2.2 吸附力测试结果
各组吸附力比较结果见表2。4个实验组的吸附力与对照组相比差异均有统计学意义(P<0.05),B、D组间吸附力差异没有统计学意义(P>0.05),其余任意两组间的吸附力差异均有统计学意义(P<0.05)。其中,A组吸附力最好。
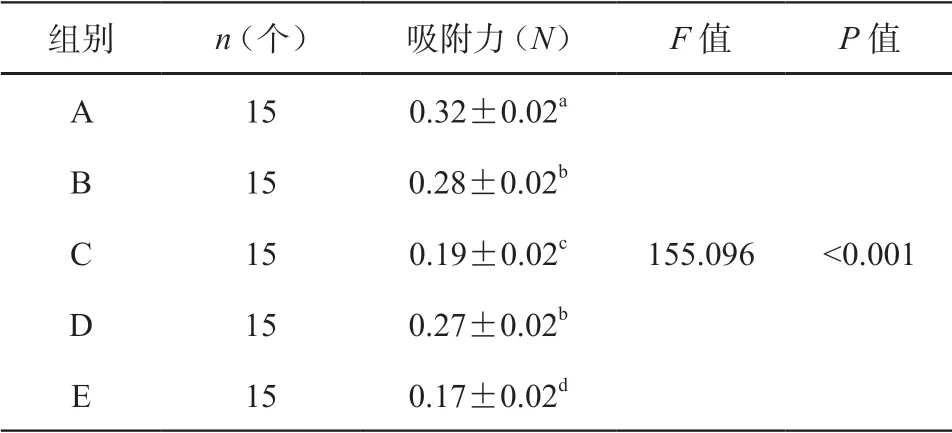
表2 各组吸附力数值
3 讨论
研究表明,树蛙能牢牢吸附于物体表面主要是依靠足垫分泌粘液产生毛细作用[4]。此外,边界摩擦、机械互锁、负压吸附等也在这一“湿粘接”过程中起到一定的作用[5]。从提高全口义齿固位力的角度出发,针对全口义齿吸附区是一个整体这一问题,根据树蛙足垫的吸附机理,该研究拟制作的仿生义齿可将整体划分为无数个互不影响的小单元,从而在局部吸附被破坏的情况下仍能保证全口义齿的固位。其次,在基托组织面增加一些微结构,其相对的比表面积增加。同时口腔黏膜又具有一定的适应性,因此,在压力的作用下,可以增加吸附面积。最后,由于微结构的设计参考了树蛙足垫及吸盘结构,应用于全口义齿时相当于在义齿原有的吸附机制上附加了毛细作用和负压吸附作用[10]。本研究中4组实验组与对照组相比吸附力均有增大,这是由于微结构表面与物体接触时增加了相对比表面积,还增加了摩擦力等,从而提高了吸附力[11]。
研究表明[9],六棱柱的边长L、高度H、六棱柱间的间距W等参数均会对吸附力产生影响。但作者认为不应仅单独考虑个别参数的影响,应综合H、L、W来研究对吸附力的影响。据此,本研究中微结构的设计是将各个参数的最优尺寸结合起来(如只考虑L时,100 μm及40 μm时吸附力最优;只考虑H时,75 μm为最优尺寸等),综合研究对吸附力的影响。本研究主要聚焦在各种尺寸参数综合时六棱柱微结构的整体结构形态,六棱柱的分布密度等,故没有针对单个影响因素进行多组梯度设计。依据上述理论来解释本实验的结果:首先对比A、B组,当H和L一定时,W越大,相同面积下的六棱柱数量就会减少,两个表面间的实际接触面积减小,吸附力就小;C和D是同等道理。就A、C组来说,当H一定时,两者的比较就不能仅依靠单一因素,可根据W/L来确定。根据已有研究,吸附力随W/L的增大而减小,这是因为实际接触面积的减小。很明显A组的W/L值小于C组。而B、D之间并不遵循这一规律,理论分析B组吸附力应大于D组,但表2的结果表明B、D组间的吸附力差异并无统计学意义。原因可能是翻模过程中B组柱子损坏率较大,或是B组进行吸附力测试时,接触界面有污染,从而导致其吸附力下降。故根据实验结果,如果要将上述参数应用于全口义齿组织面,应选择A组参数,即L= 100 μm,H= 75 μm,W= 33 μm。
此外,图5的SEM结果表明,在硅橡胶软衬材料翻模过程中六棱柱结构会存在破损,可能的原因有:一是材料自身原因。Silagum-Comfort[12]软衬材料与义齿基托材料具有牢固的粘接性,但其流动性并不优越。由于本实验设计的尺寸参数均为微米级,而材料要流入凹六棱柱内,故在翻模过程中部分硅橡胶材料并不能完全进入凹六棱柱内,所以翻模的结构会存在一定破损率。二是制作吸盘结构过程可能存在问题。六棱柱结构顶端的吸盘结构主要是靠部分充填技术[13],即依靠液体的毛细作用及困在孔洞内的空气来实现的。在这一过程中,如果孔洞内的空气有溢出,则相对应的吸盘凹型结构会受影响。
根据前述实验,本研究中仿生全口义齿的制作过程如下:(1)常规制取终印模、灌注终模型。(2)数字化扫描模型。(3)3D建模,将参数A的反结构加到3D建模的表面(微结构设计在距边缘约2mm-3mm处,以保证边缘的封闭性),3D打印表面含有微结构阴模的模型。(4)在3D打印的模型上常规制作组织面为SLC软衬硅橡胶材料的全口义齿,仿生全口义齿即制作完成。
本研究是将样片与硅胶仿生模型进行吸附,这只是一个体外的吸附实验单元,具体应用到口内时,与黏膜之间是否仍有这种吸附效果,是否会对黏膜有不良影响仍不清楚。另外,临床应用过程中,能否保持功能状态下表面微结构有增大吸附力的效果?在休息时该作用能否消失或减小从而减小对黏膜的不良影响等问题,仍值得研究。
4 结论
本研究结果表明,在软衬硅橡胶材料表面制作适宜尺寸的仿树蛙足垫微阵列结构可以提高硅橡胶材料表面对其他物体的吸附力。这一设想为改善全口义齿固位力提供了一种新思路,但其临床应用仍待进一步研究。
猜你喜欢
船海工程(2022年6期)2023-01-02
口腔颌面修复学杂志(2021年6期)2021-11-30
Asian Herpetological Research(2020年4期)2020-12-30
机电工程(2020年10期)2020-11-04
小哥白尼(野生动物)(2020年5期)2020-09-24
石家庄铁道大学学报(自然科学版)(2020年4期)2020-02-22
中华老年口腔医学杂志(2019年4期)2019-01-04
小学科学(学生版)(2018年7期)2018-08-13
中华老年口腔医学杂志(2016年3期)2017-01-15
Zoological Research(2016年1期)2016-03-22