滑动放电等离子体控制细长体头部背风区非对称涡实验研究
2022-12-09 08:58金元中郑博睿喻明浩刘园鹏张倩孙正中于涛
实验流体力学 2022年5期
金元中,郑博睿,*,喻明浩,*,刘园鹏,张倩,孙正中,于涛
1. 西安理工大学,西安 710048 2. 伦敦大学 城市学院,伦敦 EC1V 0HB 3. 重庆交通大学 绿色航空技术研究院,重庆 401135
0 引 言
战斗机的机动性和敏捷性是决定空战胜负的关键因素,其中机动性已成为现代战斗机最重要的技术指标之一[1]。为了获得战术优势,要求飞行器能在大迎角甚至在过失速条件下机动飞行。当细长体飞行器大迎角机动飞行时,其绕流流场呈现出复杂多涡流动现象,流场参数变化迅速,边界层的分离,旋涡的形成、发展和破裂以及不对称涡的产生,导致气动力和力矩出现很强的非定常非线性特性,最终在大迎角无侧滑状态下,产生强度很大、随机出现的侧向力和偏航力矩,影响飞行性能[2-4]。
已有研究发现:飞行器细长体背风区的非对称涡是产生这些随机侧向力的直接原因,侧向力的方向和大小均由这些强度和位置不对称的旋涡决定[5]。因此,需要寻求有效的控制手段抑制细长体背风区非对称涡的形成与发展,控制侧向力和偏航力矩,为提升飞行器大迎角飞行时的操纵性和稳定性提供技术支撑。
对于大迎角下细长体背风区非对称涡的成因,目前主要有两个观点[6-9]:1)黏性观点。在黏性作用下,细长体头部背风区边界层转捩点不对称,造成该区域分离点不对称,从而导致涡脱落点不对称,进而演化为非对称涡,最终产生方向和大小随机的侧向力。2)无黏观点。细长体背风区旋涡在空间上存在不稳定性,造成旋涡的空间拓扑结构不对称,进而诱发背风区流动不对称,最终产生不可预测的侧向力。
部分学者倾向于认同无黏观点[9]。本文基于“无黏观点”设计了顺流式滑动放电等离子体激励器,旨在沿来流方向在细长体头部背风区两侧产生对称的等离子体激励,在附壁效应作用下,细长体头部背风区两侧的等离子体射流在背风区中心位置汇聚为一股合成射流,起到类似三角翼背鳍将涡对隔离的效果,削弱非对称涡之间的相互作用,提高旋涡的稳定性。
根据有无外在能量输入,细长体非对称涡控制技术可分为被动控制技术和主动控制技术。被动控制技术主要有边界层转捩带、微鼓包、微凹坑、边条、头部钝化、自激振荡旗帜和涡流发生器等。主动控制技术主要有等离子体发生器、单孔位微吹气、头部轴向吹气、合成射流激励器、非定常小摆振片和微充气边条等[10]。与主动流动控制技术相比,被动流动控制技术需要改变细长体外部构型,导致成本增加;同时,当外部流场发生变化时,被动控制技术不能根据流场环境进行实时调节,控制效果降低。因此,近年来主动控制技术得到了更多的关注[11]。
等离子体流动控制技术是利用等离子体气动激励改善气动特性的新概念主动流动控制技术,具有响应时间短、无运动部件、激励频带宽等技术优势,已在机翼增升减阻、压气机扩稳增效和激波特性控制等方面取得重要进展[12]。近年来,等离子体控制细长体背风区非对称涡的研究越来越受到国内外关注。孟宣市[13-14]、郑博睿[15]、王健磊[16]、龙玥霄[17]等对采用等离子体流动控制技术的非对称涡流动控制机理进行了深入研究,在提高可控来流雷诺数、电参数最优化(激励电压、脉冲频率和占空比)、激励器几何参数最优化(激励器尺寸、结构和放电类型)等方面取得了一定成果[18-20]。
近年来,在介质阻挡放电等离子体激励器(Dielectric Barrier Discharge,DBD)研究的基础上,国内外开展了一系列等离子体滑动放电(sliding discharge)方面的研究[21-23]:通过给DBD 增加滑动电极、接入高压直流,提升DBD 激励器表面电场;激励器上表面中性粒子在更强的电场作用下,进一步促进DBD 表面空气电离;带电离子在电场力驱动下,向滑动电极加速运动;随着直流电压增强,等离子体放电面积增大,产生滑动放电效果。研究发现,与常规DBD 相比,滑动放电可以增大流动控制有效区域(dm2量级),提升最大诱导速度(同比提升1.5 倍),实现诱导射流方向可控(0°~180°可调),极大改善等离子体流动控制效果[24-26]。
为进一步改善等离子体流动控制效果,本文根据非对称涡成因假设,设计了顺流式四电极滑动放电等离子体激励器,即在常规介质阻挡放电等离子体激励器(DBD)基础上增加2 个裸露电极作为滑动电极,目的是扩大等离子体放电面积以增强等离子体诱导产生的体积力。
本文通过风洞实验研究不同激励电压、不同来流速度对细长体头部背风区非对称涡控制效果的影响规律。根据测压系统和粒子图像测速仪(PIV)的同步测量,分析等离子体激励诱导的旋涡与非对称涡之间动态相互作用的时空演变规律,进一步阐明等离子体放电对细长体绕流流场和非对称涡空间拓扑结构的作用效果。
1 实验设备及模型
1.1 实验风洞及模型
实验在空军工程大学低速闭环回流式风洞(图1)中开展。风洞实验段长1.0 m、宽1.2 m、高1.0 m,风速可调范围5~75 m/s,湍流度小于0.2%。
细长体圆锥实验模型底部直径120 mm、圆锥半顶角10°,圆锥可拆卸头部长150 mm。安装初始迎角45°,侧滑角0°,可通过迎角机构精确调节,误差为0.2°,如图2 所示。模型表面测压系统采用PSI 公司的9816 压力传感器,采样频率为100 Hz,压力误差为0.1% FS,采集量程为±1 psi(6.895 kPa)。实验中,压力传感器对每个状态均采集10 s。
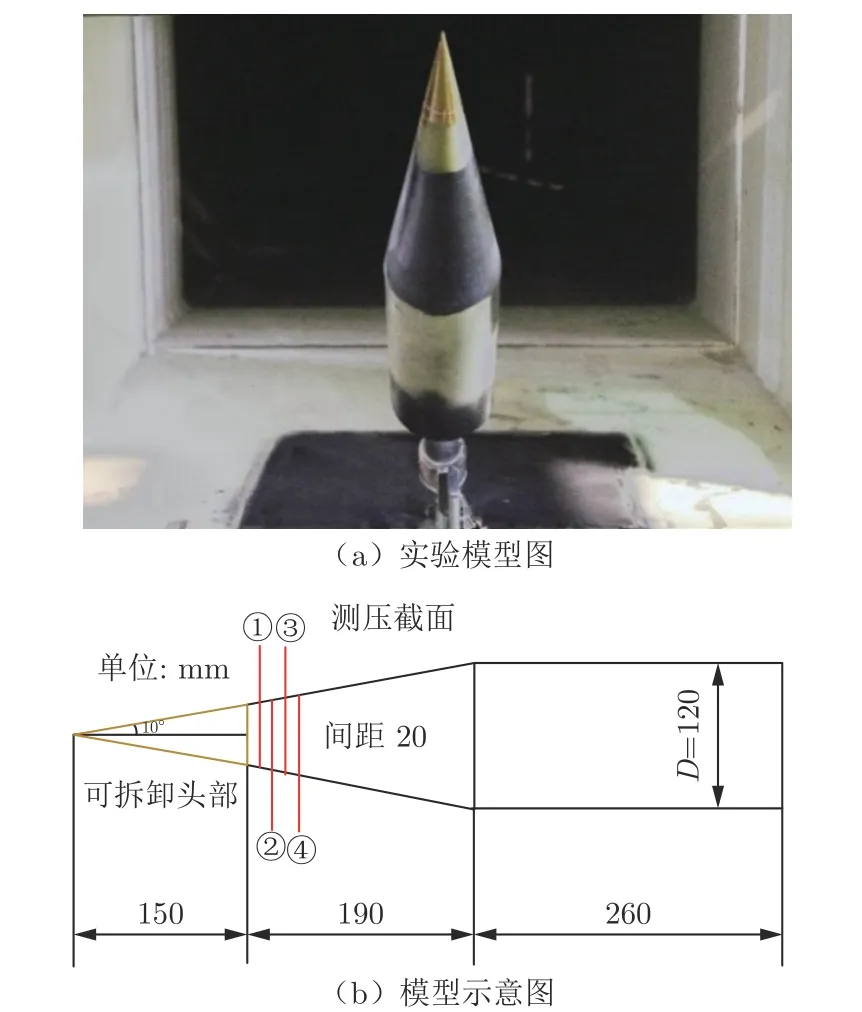
图2 细长体实验模型及模型示意图[25]Fig. 2 Schematic diagram of slender body[25]
采用二维PIV 对细长体头部背风区非对称涡的精细空间结构进行了定量研究。使用2048 像素×2048 像素的CCD 相机进行拍摄,拍摄截面为测压截面①,距离细长体顶点170 mm,如图2(b)所示,图像采集频率为5 Hz。激光以45°角照射于测压截面①。为避免模型表面反光影响拍摄效果,在细长体可拆卸头部之外的表面均匀喷涂哑光黑漆。PIV 示踪粒子判定准则为[27]:
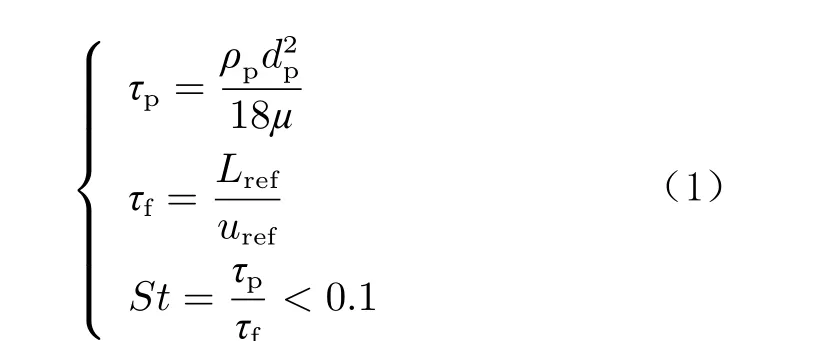
式中:τp、ρp和dp分别为示踪粒子的响应时间、密度和直径;µ为空气动力黏度;τf为外流特征时间;Lref为实验模型特征尺度;uref为实验主流速度。当斯托克斯数St<0.1 时,示踪粒子和外界流动有较高的同步性。经过计算,采用烟饼产生直径为2 µm、密度为1000 kg/m3的示踪粒子,投放于风洞实验段前端拐角处。根据相机成像原理,有如下公式[27]:
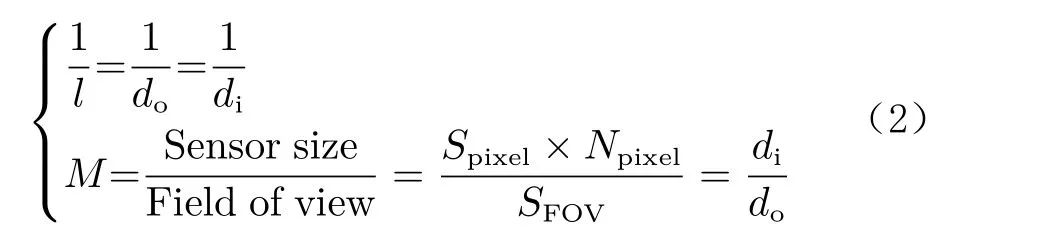
式中:l 为相机焦距;do为物距,di为像距;M 为成像放大倍数;Spixel为像素点面积,Npixel为像素点个数;SFOV为被测流场面积。经过计算,确定了成像放大倍数(M=0.1)和相机布置位置(与测压截面①距离675 mm 处,如图3 所示)。

图3 PIV 实验布局示意图Fig. 3 Schematic diagram of PIV experiment layout
PIV 实验布局如图3 所示。基于前期风洞实验[25],选择CTP-2000K 电源作为脉冲高压电源,选取流动控制效果较好的激励参数开展本次实验研究(脉冲频率f=300 Hz,占空比τ=30%)。实验中的其他电参数:载波频率fc=7.45 kHz,高压直流电压UDC=–6.2 kV。
1.2 滑动放电等离子体激励器
本实验采用四电极滑动放电等离子体激励器,与常规DBD 激励器相比,可以产生更大面积的等离子体放电。
首先,将一对裸露的带状电极(长70 mm、宽1 mm,以厚度0.03 mm 的铜箔制成)对称布置于细长体圆锥实验模型头部表面(沿圆锥母线布置,周向角度θ分别为+90°和–90°),在2 个裸露电极之间的绝缘层下方布置扇形覆盖电极,形成常规DBD 激励器。绝缘层由厚度1 mm、相对介电常数2.17 的聚四氟乙烯薄绝缘材料制成。前期研究发现:激励器位置越接近圆锥顶点,流动控制效果越好;但若过于接近,激励器前端容易产生电弧放电。为兼顾激励器“尽量接近圆锥顶点”和“避免前端产生电弧放电”这两个原则,本实验中带状电极前端距圆锥顶点20 mm。为进一步改善DBD 激励器的流动控制效果,在2 个带状电极正中间、绝缘层上表面增加1 个等腰三角形的裸露电极作为滑动电极(以厚度0.03 mm 的铜箔制成),其两侧与带状电极均相距10 mm。滑动电极边长约30 mm,底边长约15 mm,前端距圆锥顶点60 mm。在2 个带状电极上施加交流电,滑动电极连接至高压直流,在圆锥可拆卸头部即可产生大面积的滑动放电。为防止滑动电极产生尖端放电,将其3 个角手工修剪出平滑圆形倒角。滑动放电等离子体激励器示意图及实物图如图4 所示。
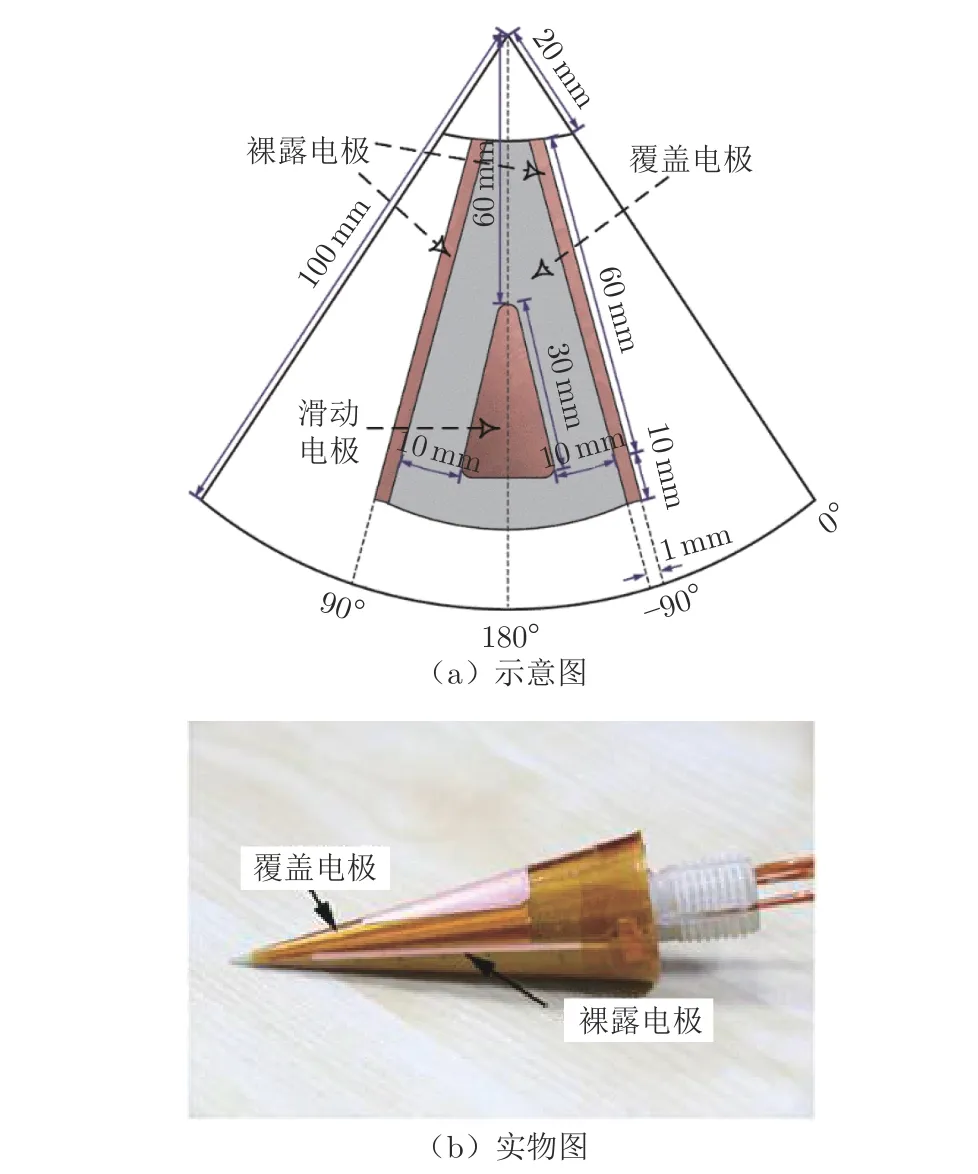
图4 滑动放电等离子体激励器示意图及实物图Fig. 4 Schematic diagram and image of sliding discharge plasma actuator
2 实验结果分析
2.1 激励电压的影响
保持来流速度u∞=10 m/s 和迎角α=45°,选取脉冲频率f=300 Hz(归一化频率f+=1.96)、占空比τ=0.3、直流电压UDC=–6.2 kV,研究不同激励电压Up-p(8、10、12、14 和16 kV)对细长体表面压力Cp分布的影响,结果如图5 所示。在关闭等离子体激励时(Plasma off),左侧吸力峰值较高(|Cp|=0.8969,θ=75°处),右侧吸力峰值较低(|Cp|=0.1221,θ=195°处),说明此时细长体背部左侧旋涡距表面更近,右侧旋涡距表面较远,表现为明显的非对称涡结构。

图5 不同激励电压下的细长体表面压力分布Fig. 5 The pressure distribution with different actuation voltages
与关闭等离子体激励时相比,当激励电压增大至8 kV,细长体表面压力分布曲线左右两侧压力分布变化不大,仍表现出明显的非对称结构;当激励电压增大至10 kV,左侧吸力峰值(|Cp|)有所降低,右侧 吸 力 峰 值 有 所 上 升,从0.1221 变 化 至0.1547(θ=195°处),两侧压力分布向对称趋势发展;当激励电压增大至14 kV,左右两侧吸力峰值之差大幅减小,左 侧 吸 力 峰 值 从0.8969 变 化 至0.8491(θ=75°处),右侧吸力峰值有所上升,从0.1221 变化至0.2935(θ=195°处),非对称涡结构向对称状态演变;当激励电压增大至16 kV,从图5(b)可明显看到:两侧压力分布接近对称;左侧吸力峰值从0.8969 变化至0.4872(θ=75°处),右侧吸力峰值从0.1221 变化至0.4146(θ=195°处);两侧最大峰值之差从初始的0.7718 降低至0.0726,降幅达90.6%,表明此时细长体头部背风区由原本的非对称涡结构演变为对称涡结构。
对比图5(a)和(b)可以发现:随着激励电压的升高,右侧吸力峰值上升,左侧吸力峰值降低,两侧压力分布趋于对称,细长体背风区由原本的非对称涡向对称涡演变。其机理在于:
1)细长体头部背风区左右两侧对称布置的等离子体激励器沿来流方向产生两组等量的诱导射流,由于附壁效应,诱导射流会贴着细长体背部曲面向背部中央运动,最终在背部中央汇聚为合成射流,阻断非对称涡之间的相互干扰,形成了新的涡系结构空间分布。
2)等离子体激励电压越高,激励能量越强,边界层与主流之间的动量交换更强,导致分离点后移,同时在细长体背部中央汇聚为合成射流的能量增强,对非对称涡之间动态干扰的抑制效果加强,使得背风区旋涡更贴近细长体表面,重新形成稳定的非对称涡空间拓扑结构,流动更不易分离。
图6 为测压截面①处不同激励电压下非对称涡空间结构的PIV 流场显示结果。图中,蓝色代表顺时针正涡量,红色代表逆时针负涡量。当关闭滑动放电等离子体激励时,左侧蓝色旋涡离表面较近,右侧红色旋涡离表面较远,形成非对称空间拓扑结构。开启等离子激励时,左侧旋涡位置变化不大,右侧旋涡向表面靠近。当激励电压增大至10 kV 时,左侧旋涡开始远离表面;继续增大至12 kV,左右两侧旋涡高度差缩小,旋涡的空间非对称性得到抑制;当激励电压增大至16 kV 时,右侧旋涡从高位涡演化为低位涡,两侧旋涡空间位置趋于对称,旋涡的空间非对称性基本得到抑制。
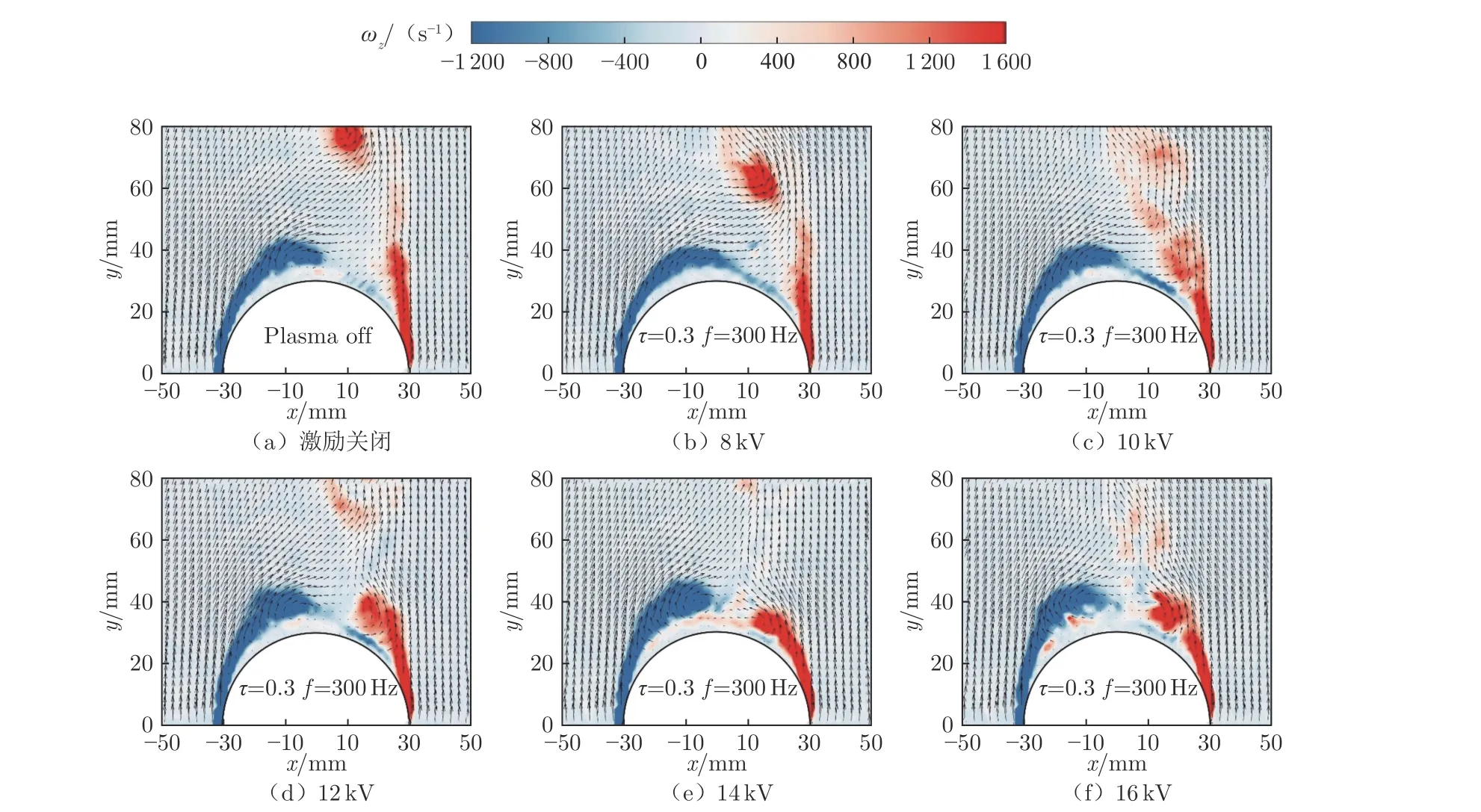
图6 不同激励电压下的等离子体流动控制PIV 测量结果Fig. 6 PIV measurement plasma flow control results at different actuation voltages
为分析不同激励电压下滑动放电等离子体激励器的控制效果,对截面压力系数积分,求得局部侧向力系数。侧向力系数CC计算公式如下:

式中:Cn为第n 个截面局部侧向力,选定测量截面①(n=1);来流动压q∞=1/(2ρ∞u∞2),p∞为来流参考静压;截面直径d=19.1 mm;测压孔个数k=24;下标i 表示测压孔编号,pni表示第n 个测压截面第i 个测压孔的压力值;测压孔间隔角度Δθ=15°。定义侧向力指向细长体右侧时为正(逆流向右侧),可求得关闭等离子体激励时的局部侧向力系数CC=0.643。
为便于评估等离子体激励器的控制效率,将施加/未施加控制的侧向力系数之差ΔCC与未施加控制的侧向力系数CC,off的比值定义为侧向力控制效率η:
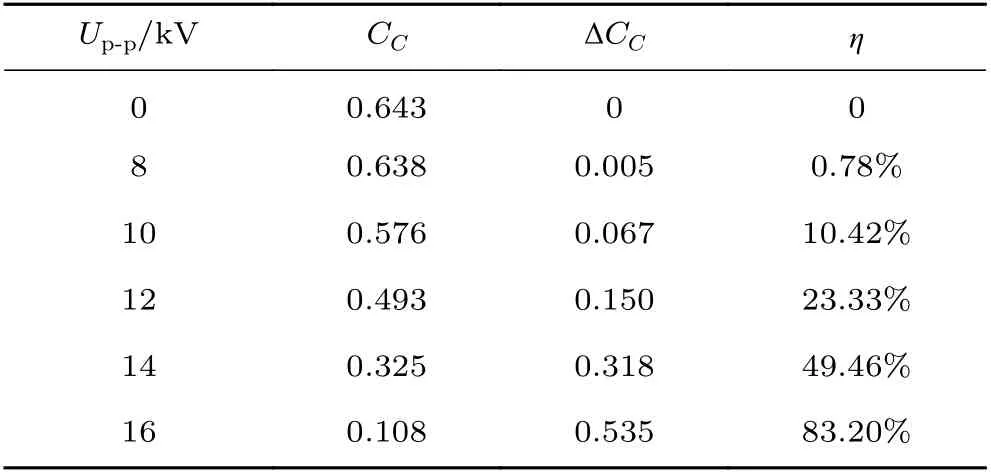
表1 不同激励电压对侧向力控制的影响分析Table 1 Analysis of the influence of different actuation voltages on lateral force control
2.2 不同来流速度对侧向力控制的影响
研究不同来流速度u∞(10、15、20 和25 m/s)下滑动放电等离子体激励器对细长体表面压力分布的影响。保持激励电压Up-p=16 kV、脉冲频率f=300 Hz(归一化频率f+=1.96)、占空比τ=0.3、直流电压UDC=–6.2 kV、细长体迎角α=45°。测压结果如图7 所示。
由图7(a)可见:当u∞=10 m/s、关闭等离子体激励时,左侧吸力峰较低(|Cp|=0.0613,θ=75°),右侧吸力峰较高(|Cp|=0.6232,θ=285°),两侧峰值差值为0.5619,呈现出明显的非对称涡结构。开启等离子体激励后,左侧吸力峰值上升,而右侧吸力峰值降低,两侧峰值差值从0.5619 减小为0.0932,即两侧压力分布接近对称,表明在u∞=10 m/s 时,原本明显的空间非对称涡受到等离子体激励的抑制。在此工况下,通过滑动放电在细长体头部背风区两侧产生体积力,向边界层注入流场动量,产生诱导旋涡,形成合成射流,改变了非对称涡空间结构,有效地抑制了侧向力。
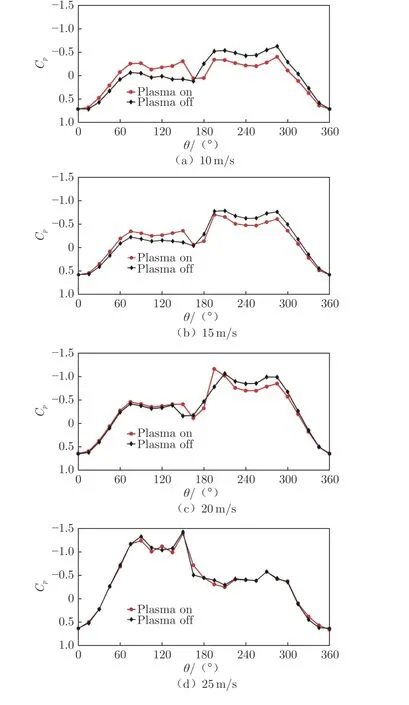
图7 不同来流速度下的压力分布对比Fig. 7 Comparison of pressure distributions at different wind speeds
由图7(b)可见:当u∞=15 m/s 时,左侧吸力峰值有所上升,右侧吸力峰值有一定程度降低。施加控制可以改善吸力峰值不对称状况。对比图7(a)发现:随着来流速度增大,非对称涡控制效果减弱。当u∞=20 m/s 时,施加控制后的吸力峰值不对称状况被轻微抑制,与u∞=10 m/s 时相比,控制效果进一步减弱。如图7(d)所示,当u∞=25 m/s 时,控制基本趋于无效,施加控制后的流场接近未施加控制时的状态。
对上述实验结果进行分析可知:随着来流速度增大,细长体头部背风区边界层分离线向上游移动,分离区变大,细长体头部背风区非对称分离涡增强;而等离子体放电产生的动量并未随之而动态改变,脉冲激励注入的能量不足以帮助流体克服随来流速度增大而逐渐增强的逆压梯度,细长体头部背风区非对称分离涡的位置未发生变化,等离子体控制随来流速度增大而逐渐失效。
图8 为测压截面①处不同来流速度下非对称涡空间结构分布的PIV 流场显示结果。当u∞=10 m/s、关闭等离子体激励时,左侧蓝色旋涡离表面较远,右侧红色旋涡离表面较近,形成非对称空间旋涡结构。开启激励后,左侧旋涡和右侧旋涡空间位置趋于对称,与图7(a)测压曲线结果契合,表明滑动放电等离子激励在此工况下有较好的控制效果。当u∞=15 m/s、开启激励时,左侧旋涡得到抑制,控制效果与u∞=10 m/s 时近似。对比图7(a)和(b)的测压结果可知:u∞=10 m/s 的控制效果更好,压力分布更加对称;继续增大u∞至20 m/s,控制效果变差,非对称涡结构和不施加控制的状态接近;继续增大u∞至25 m/s,非对称涡系结构趋于未施加控制的状态,可以认为等离子体控制基本无效。

图8 不同来流速度下的等离子体流动控制PIV 测量结果Fig. 8 PIV measurement results of plasma flow control with different incoming wind speeds
根据式(3)计算不同来流速度下施加等离子体控制时的局部侧向力系数,根据式(4)计算滑动放电的侧向力控制效率。如表2 所示,当u∞=10 m/s、开启等离子体激励时,滑动放电具有较大的控制效率,最高可达83.48%。随着u∞增大,控制效率逐渐降低。u∞=25 m/s 时,控制效率仅为5.95%。预测在u∞=26 m/s 左右时,等离子体控制细长体非对称涡无效。因此,还需进一步改善控制手段和方法。

表2 不同来流速度对侧向力控制的影响分析Table 2 The influence of different wind speeds on lateral force control
3 结 论
基于滑动放电等离子体控制非对称涡的应用前景,本文深入研究分析了激励电压、来流速度对非对称涡控制效果的影响规律,得到如下结论:
1)PIV 流场结果显示:非对称侧向力的产生是由模型背风区流场中旋涡的非对称分布导致;抑制非对称涡的空间不对称性是减小侧向力的主要方法。本文实验中,激励电压16 kV、脉冲频率300 Hz(归一化频率1.96)、占空比0.3 及直流电压–6.2 kV是控制细长体非对称涡的最优参数,最大控制效率可达83.48%。
2)实验所采用的顺流式滑动放电等离子体激励器沿来流方向在细长体头部背风区两侧产生对称的等离子激励,在附壁效应作用下,两侧等离子体射流在细长体头部背风区中心位置汇聚为一股合成射流,削弱非对称涡之间的相互作用,改变非对称涡空间结构,提高旋涡的稳定性,抑制较大的侧向力。
3)激励电压是影响等离子体激励器控制效果的主要因素。相同激励条件下,放电强度与激励电压的大小呈正比。增大激励电压可以有效提升体积力,为激励器附近流场注入更多的动量,从而改变细长体头部背风区非对称涡形态。
4)自由来流速度对激励器控制效果有较大影响。相同激励条件下,自由来流速度越高,控制效果越差。
目前的研究主要集中于中低雷诺数范围,与实际工程应用仍有较大差距。为实现等离子体流动控制技术的工程应用,仍需进一步创新控制方法。
猜你喜欢
能源工程(2022年2期)2022-05-23
北京航空航天大学学报(2021年7期)2021-08-13
作文通讯·初中版(2021年1期)2021-04-01
水利规划与设计(2020年1期)2020-05-25
制造技术与机床(2018年10期)2018-10-13
制造技术与机床(2018年8期)2018-10-09
固体火箭技术(2015年6期)2015-04-24
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2014年6期)2014-12-10
河南科技(2014年5期)2014-02-27