路面裂缝的结构光车载检测技术研究
2022-12-21 01:38刘希伟
交通科技与管理 2022年23期
刘希伟
(新疆公路桥梁试验检测中心有限责任公司,新疆 乌鲁木齐 831000)
0 引言
基于2d影像的检测路面裂缝技术,因为难于克服路面阴影、污渍、不均光照等不利因素的干扰,测量结果经常会存在相当数量的误判或者漏检。针对2d影像裂缝检测技术所存在的技术不足,3d结构光检测技术相继得到开发应用。该技术利用3d识别和信息获取优势,形成抗御环境光干扰能力强,细节获取更充分,影像反应更接近真实物态,识别精度更高等技术优势,被越来越广泛地应用到路面裂缝检测中。
1 线结构光扫描检测原理
1.1 线激光扫描原理
路面裂缝的结构光检测技术属于非接触式路面裂缝检测技术,应用线激光三角检测原理实现裂缝测量,具体见图1所示。圆柱体代表摄像机,立方体代表线激光器,摄像机光轴与线激光器光平面的交点建立水平测量基准面,θ1为测量基准面法线与线激光器光平面的夹角,θ2为测量基准面法线与摄像机光轴的夹角。按θ1的角度,激光从一侧投影激光平面至基准面上面,在基准面上构成一条直线激光条纹。如果基准面存在物体或变形,光条被调制发生变形。摄像机以θ2的角度从另一侧检识扫描反射光,经过数理模型变换和识别处理,获得扫描面的裂缝信息。结构光检测技术能够形成对路面裂缝的3d识别系统,因此其裂缝识别更立体、直观和准确。

图1 线激光检测原理
1.2 感受器组合方式
依据线激光与摄像机的空间几何关系,线结构光感受器的结构可分为3种,见图2所示。
图2 感受器组合方式
(1)垂直投射线激光到待测物体表面,摄像机从一侧倾斜采集数据。
(2)线激光从一边投射到被测物体表面,摄像机垂直捕获数据。
(3)线激光被斜投射到被测物体表面,摄像机也从另一侧斜向捕捉数据。见图2具体所示,β是线激光平面和摄像机光平面之间的夹角[1]。
1.3 路面缝隙抗颠簸结构光检测模型
结构光检测路面缝隙抗颠簸模型见图3所示。
图3 路面缝隙抗颠簸结构光检测模型
当承载平台颠簸时,检测面与线激光间的距离就会不停地变化,检测分辨率因此深受干扰。为了克服这个问题,在图3所示的感受器抗颠簸测量模型中,将摄像机镜头的光轴与检测平面的交点水平移动至基准面的下方,其与基准面的距离就是颠簸量Δd的最大值,这样即使颠簸过程中,检测分辨率依然可以满足检测精度要求。
2 感受器参数计算与优化选择
2.1 感受器参数计算
检测指标包括:扫描速度v、测宽L、测深±ΔH,深度分辨率dz、纵向分辨率dy,横向分辨率dx。
系统扫描获得包含道路信息的光条影像,每条影像反映xoz平面的形态变化,dx表示镜头在x轴向上的分辨率,dz标示镜头z轴向上的分辨率。dy表示系统与道路横断面采样在y轴方向上的距离,其与帧率fps、扫描速率v之间的关系式:

感受器的结构参数包括检测宽度l、高度H、镜头焦距f、摄像机光轴与光平面夹角β、镜头视区等。
(1)实际检测宽度l与感受器数量n。假设单车道为3.75 m宽度,由于高度限制,单套感受器无法满足这样的宽度。为此采取了如下技术处理,检测宽度≤2 m,使用1套感受器,检测宽度>2 m,则应用2套感受器[2]。
(2)检测高度H公式如下,其中θ为线激光器的扇形角度。

(3)镜头视区ROI公式:

(4)帧率fps公式如下,其中v为扫描速度,dy为纵向分辨率。

(5)镜头焦距f公式:

(6)摄像机光轴dz与光平面夹角β公式:

(7)检测宽度l'计算公式:

(8)横向分辨率dx'计算公式:

满足dx'≤dx,返回结束;否则增加焦距f,记f',从(6)或(5)重新开始计算。相对简洁的是从(6)重新开始计算,该计算中深度分辨率变得更高。从(5)重新开始计算,深度分辨率不变,但感受器体积会缩小。
通过前述设计方法,可以得到满足检测系统要求的感受器结构参数值和取值范围。
2.2 感受器参数优化选择
2.2.1 感受器成像模型
感受器成像模型见图4所示,其中包括3个坐标系:Og-XgYgZg世界坐标系、Oc-XcYZc摄像机坐标系和O-XYZ影像坐标系。Og-XgYgZg由Oc-XcYZc和激光平面确定。其中的Zq轴为摄像机光轴,Oc为摄像机光轴中心点。Zc轴与像平面的交点即为影像坐标系O点,即像平面的中心,摄像机坐标轴与影像坐标轴平行,线激光平面与Zc轴的交点为世界坐标系Og点。Yg轴垂直于线激光平面,Zg轴为Zc轴在线激光平面上的投影。

图4 感受器的成像模型
2.2.2 感受器测量误差分析
治疗中体表光学监测X、Y和Z方向分别平移(0.02±0.24)、(0.09±0.40)和(0.02±0.18) mm,CBCT验证分别平移(0.01±0.37)、(0.03±0.24)和(0.03±0.19) mm,两者比较差异无统计学意义,t值分别为0.04、0.41和0.58,P值分别为0.97、0.68和0.57。
(1)间接测量误差分析。依据线结构光成像模型,通过直接测量感受器结构参数和对应的像点坐标,根据已知的函数关系,可以计算出被测物体的坐标值。通过函数关系将前述数学模型总结如下:

根据误差分析理论,可获得物体坐标的测量误差:

式中,k取Xg和Zg,i则取值H、f、X和Y,Δk表示感受器测量误差,Δi表示感受器结构参数的校准误差和测点坐标的获取误差。出于方便计算考虑,式中测量误差Δ取2的范数,即:

(2)测量误差的因素影响关系。感受器测量误差的影响因素有2个:一是物体像点坐标获取误差;二是感受器参数或校准误差。对于给定的系统,感受器参数已基本被精确校准,故基本可以忽略误差。像点坐标获取算法确定后,假定像点误差为定值,也就是ΔX=ΔY=δ,则感受器测量误差:

2.2.3 感受器结构参数优化
由以上分析可知,感受器在像面上的测量误差分布并不规则。因此通过研究图像平面中最大测量误差像素点,分析感受器参数对误差的影响,优化感受器结构参数。像面为2Tx×2Ty。像平面X=±Tx上,Y=Ty的边缘点所对应的最大测量误差为:

在确定像点坐标获取算法后,δ值即得以确定,但探测宽度所要求的感受器参数H和f须给予确定。所以影响感受器测量误差的主要是β,并且其影响呈现非线性特点。
可以采用优化定义准则的方式确定相关感受器参数。目标函数即为上述关系式(13)。在考虑规格空间限制和满足系统检测指标的前提下,尽可能获得目标函数的最小值,即为优化的结构参数。
2.3 试验计算与优化结果
2.3.1 试验初步计算结果
实例检测宽度50 cm,纵向分辨率1 cm,横向分辨率0.1 cm,深度分辨率0.1 cm,扫描速率为80 km/h。深度测量±10 cm:测量范围10 cm,颠簸±10 cm,线激光扇角度 44°[3]。
基于感受器参数计算技术获得的计算结果如下:H=61.9 cm,摄像机的帧频为2 223fps,f=1.2 cm,67.69>β>22.49,β=25°得到摄像机的感受区域ROI≥(1 553,499),选择ROI=(1 600、550)。然后基于0.17 cm的形变量、不同的颠簸和测深条件,进行测量,每个测量段的6个不同位置测量所得像素变化具体见表1所示。
表1 测量所得像素变化结果
检测数据显示,最大颠簸量和测深条件下,测量系统符合0.1 cm的深度分辨率功效要求,对工程测量具有应用价值。
2.3.2 进一步优化计算结果
上节计算得出67.69>β>22.49的结构光角度组合成果,但这仅是一个取值区间。该节再借助上述感受器参数优化确定选择方法,进一步优化取值。所获得的感受器参数优化仿真结果具体见图5所示。曲线显示,当β取值47°时,获得最小检测误差,因此β=47°即为最佳解,从而进一步提高了测量精度。
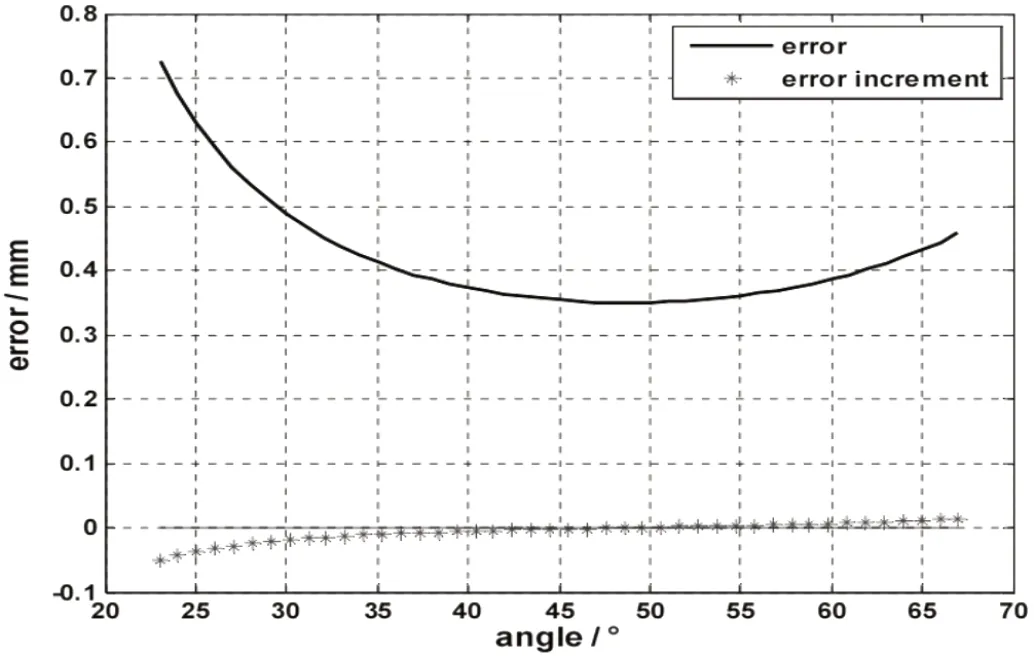
图5 检测误差与β的影响关系
通过对前述感受器结构参数的改进结果,即β=47°时,检测系统在不同颠簸条件下测量不同测深下的1.7 mm变形量,根据检测面不同位置的像素变化结果数据显示,参数改进后,检测系统的检测精度有所增强。
3 结语
该文开展了路面裂缝的结构光车载检测技术研究,主要包括:
(1)介绍了线结构光检测原理,包括扫描原理、感受器组合方式、抗颠簸结构光检测模型等技术点。
(2)介绍了感受器参数计算与优化选择技术,包括感受器参数计算、感受器成像模型、感受器测量误差分析、感受器结构参数优化等技术点。
(3)介绍了试验计算结果,验证了该技术的工程适用性。
猜你喜欢
南京林业大学学报(自然科学版)(2022年3期)2022-11-29
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
新世纪智能(英语备考)(2021年11期)2021-03-08
中国现代医药杂志(2020年10期)2020-12-14
应用数学(2020年2期)2020-06-24
中国公共安全(2017年11期)2017-02-06
百科知识(2016年21期)2016-12-24
办公自动化(2016年18期)2016-12-17
探测与控制学报(2015年4期)2015-12-15
新闻前哨(2015年2期)2015-03-11