
基于毫米波雷达的某载货车盲区监测系统设计
2022-12-28 08:04李敬斌
汽车电器 2022年11期
李敬斌
(安徽江淮汽车集团股份有限公司, 安徽 合肥230601)
随着国内经济建设的快速发展,中国商用载货车保有量越来越多,由于载货车盲区较多,极易造成交通事故,一旦与载货车发生交通事故,造成的后果极其严重。载货车盲区是指车辆静止或行车过程中,由于载货车高度及长度尺寸较大,导致驾驶员视野受到遮挡所形成的区域,如果盲区内有其他车辆、行人或障碍物体存在时,视野受限的驾驶员无法做出正确的判断和选择操作,从而可能酿成严重事故。同时GB/T 39265—2020《道路车辆盲区监测(BSD) 系统性能要求及试验方法》[1]要求:车后3m后视镜左右3m为盲区范围,后视镜右4.5m为右转弯的盲区(图1)。车辆在行驶或转向过程中,实时监测驾驶员转向盲区,并在其盲区内出现其它道路使用者时发出警告信息,因此,消除载货车盲区问题亟待解决。

图1 盲区监测系统监测区域示意图
1 盲区监测系统设计方案
本文载货车毫米波汽车盲区监测雷达系统通过雷达传感器来监控本车侧后方的区域,可以在一定范围内探测到邻近车道上其它车辆的当前位置、行驶速度、行驶方向。如果一辆车处于视角盲区位置或以很快的速度从后面接近本车,那么车外后视镜上的报警指示灯点亮来提醒驾驶员。如果此时驾驶员打开转向灯,那么车外后视镜上的指示灯闪烁,提醒驾驶员有撞车的危险。根据载货车的车身结构以及盲区监测系统国标要求,系统采用左右单侧各2个毫米波雷达[2]系统方案,系统组成见表1。

表1 盲区监测系统零部件组成
1.1 雷达设计
本系统采用77GHz毫米波雷达方案,雷达外形图及结构框图如图2、图3所示,包括加特兰二代Soc77GHz 射频收发组件、中频处理模块、雷达基带信号处理模块3 个主要部分。77GHz射频前端集控制与收发功能于一体,射频前端发射的调频连续波信号经过频率调制,产生调频连续波射频信号,经过发射天线发射出去,发射信号遇到目标后被反射回来,反射信号经过接收天线进入混频器,与本振信号差频后输出一个中频信号,中频信号夹杂着杂波信号,经过中频信号处理电路进行滤波放大,再经过模数转换器(ADC) 将中频数字信号送给基带信号处理电路,经过数字信号处理后得出中频信息,进而根据理论公式计算出目标距离,得出距离速度信息,实现目标识别、跟踪,最后实现预报警及目标距离速度显示功能,具体参数列表见表2。
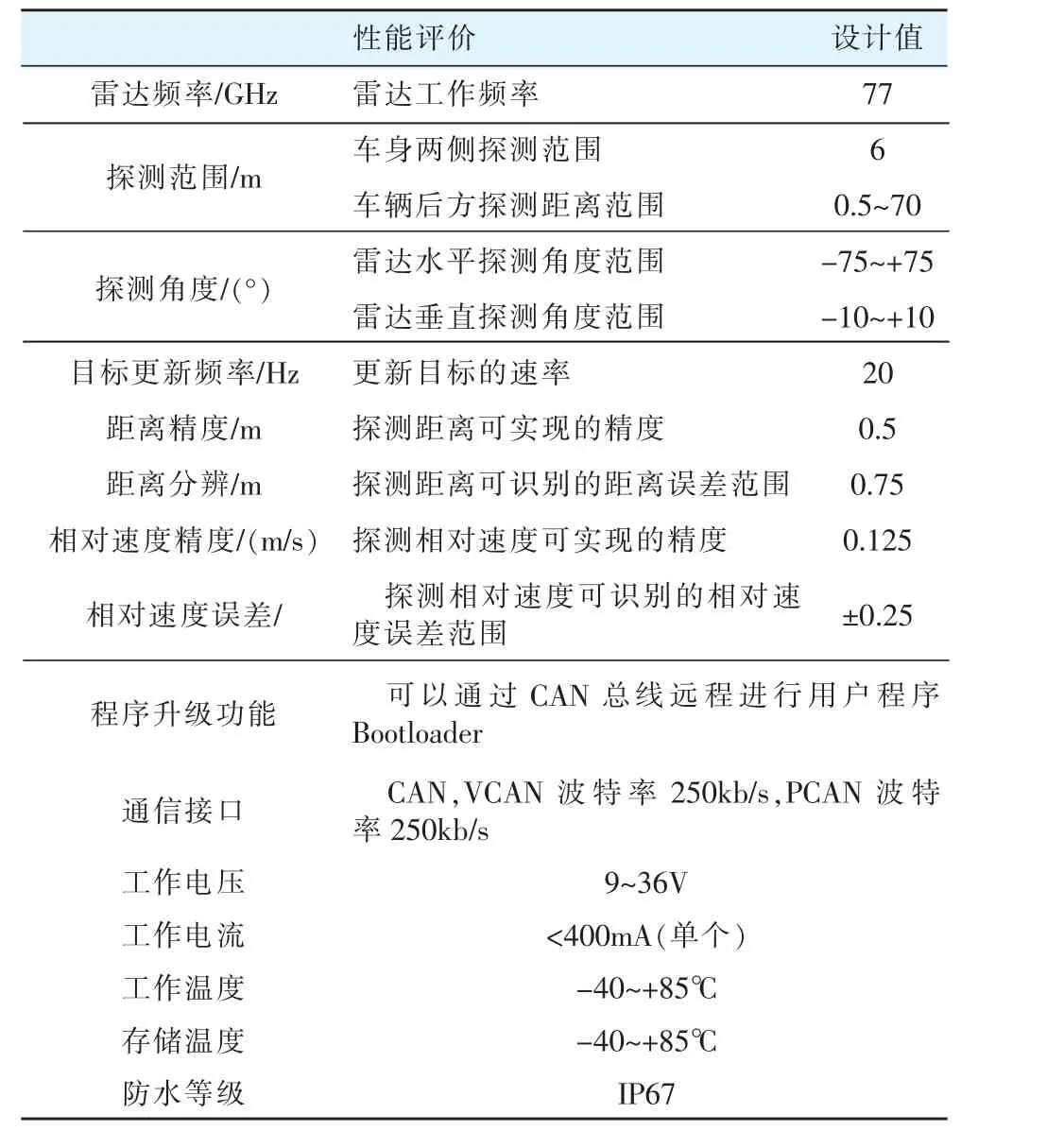
表2 盲区监测雷达基本性能参数列表

图2 毫米波雷达外形图
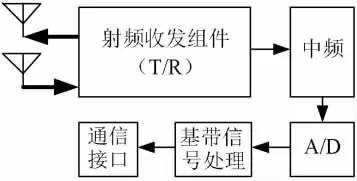
图3 毫米波雷达结构框图
1.2 系统开关
当车内电源被接通,系统完成自检后默认开启,可通过车辆内部的开关对盲区监测系统进行开启和关闭操作。本方案系统开关采用硬线开关形式,如图4所示。当该开关被按下时,盲区监测雷达系统所有功能将被关闭或开启。
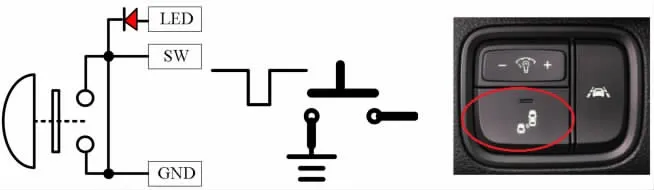
图4 系统功能开关示意图
1.3 报警指示
根据一般驾驶员的驾驶习惯,当驾驶员有变道的意愿时,会首先观察变道一侧的后视镜,因而盲区监测系统采用指示灯的方式,并且将指示灯集成在后视镜上(图5) 或望向后视镜视野方向的位置,方便驾驶员变道前确认盲区是否存在目标。盲区监测功能的报警类型有标准型报警和增强型报警两种。
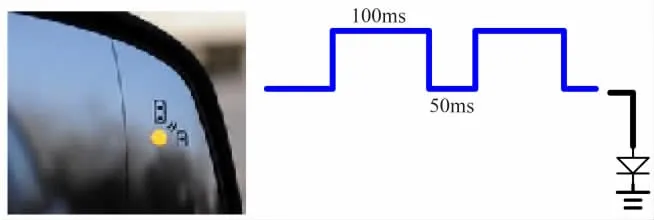
图5 外后视镜指示灯及驱动方式
1) 标准型报警:当有一侧盲区报警信息产生且本车该侧转向灯未点亮时,为标准型报警。此时,外后视镜处的报警指示灯长亮。
2) 增强型报警:当有一侧盲区报警信息产生且本车该侧转向灯点亮时,为增强型报警。此时,外后视镜处的报警指示灯闪烁。
1.4 网络交互
盲区检测系统需要与整车进行交互,系统与整车部件拓扑如图6所示。
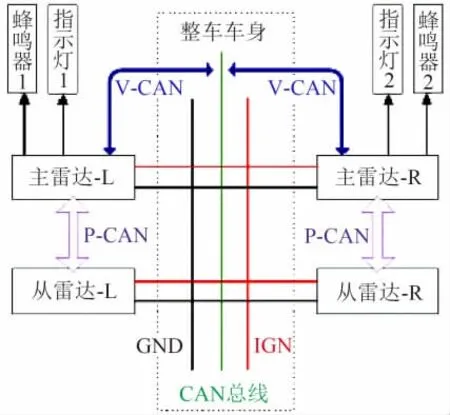
图6 盲区监测系统与车辆部件拓扑
盲区监测系统需要通过车辆CAN总线获取车辆的部分信息,作为功能应用的输入;报警指示可以是光学或声学的指示器,也可通过网络广播到整车总线以便做更多形式的报警;同时可以将整个预警系统的相关诊断、故障信息上报等。根据系统与整车的拓扑,毫米波雷达预警性系统通过V-CAN接入到车身CAN网络,实现系统与整车的信息交互。通过获取车辆的实时参数,作为预警系统的报警初始条件,同时,在符合规范的前提下,系统可以上报雷达的当前报警状态以及系统的状态和诊断信息等,供车辆进行二次应用开发。系统对车身参数的需求以及上报的信息如表3所示。

表3 CAN信息交互信号列表
2 盲区监测系统布置方案
本文采用单侧双毫米波雷达设计,以实现雷达最优探测性能及满足国标要求为前提,结合车辆的数模以及实车测试,将系统安装在前轮挡泥板金属支撑杆侧面,通过雷达支架固定在金属支撑杆上,其安装位置如图7所示。

图7 盲区监测雷达安装位置示意图
系统覆盖范围需满足国标要求,具体覆盖区域(淡绿色的区域为雷达有效探测区域) 如图8所示,双雷达系统对单侧的目标检测覆盖无死角,可以实现国标要求区域的目标探测,可通过设计优化的安装角来实现对侧后方和侧前方目标的有效探测(安装角度较小,对侧后方或前方目标辐射能量较强,有利于目标的检测),且对于侧向目标检测,对后期开发实现除去BSD功能的LCMA、RCTA、FCTA等功能,高有效性的检测结果是必不可少的。

图8 盲区监测系统覆盖范围
在行车状态下,盲区监测系统对本车的驾驶员两侧车道视野盲区进行监测。车后3m及后视镜左右3m为盲区范围,后视镜右4.5m为右转弯的盲区,车辆在行驶或转向过程中,实时监测驾驶员转向盲区,当有目标车辆出现在该区域且满足报警条件时,系统将对驾驶员做出报警指示。盲区监测功能报警区域(淡红色区域) 如图9所示。

图9 载货车盲区监测系统报警区域示意图
3 系统工作
3.1 系统自检
系统自检项目包括雷达系统关键电子元器件和模块状态是否正常、系统的初始化参数是否正常、车身交互信息是否正常等。当盲区监测雷达成功上电后,立即进行自检,此时外后视镜的指示灯点亮且持续时间小于3s,仪表盘上系统状态指示灯点亮,当自检结果正常时,车内仪表盘和外后视镜的指示灯都熄灭,雷达进入工作状态;当自检发现故障时,外后视镜的指示灯熄灭,而车内仪表盘的指示灯保持点亮,待问题处理完毕后系统恢复正常。系统上电自检流程如图10所示。

图10 系统上电自检流程图
3.2 系统工作状态
盲区监测系统包括系统关闭、系统待机、系统激活及系统故障4种状态,系统工作状态示意图如图11所示。
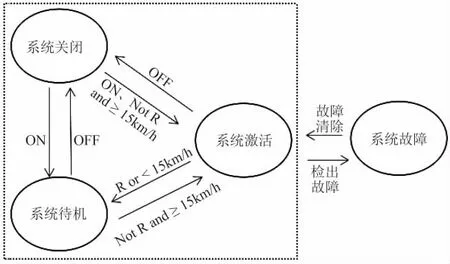
图11 系统工作状态示意图
1) 系统关闭:系统开关关闭时,系统处于关闭状态,此时系统不能工作。
2) 系统待机:系统开关开启后,系统进入待机状态,此时可以监测系统覆盖探测区域目标的运动状态,系统不能进行盲区监测预警工作。
3) 系统激活:系统处于待机状态时,若本车行驶速度不低于15km/h且车辆不处于倒挡状态时,系统进入激活状态,此时,系统实时对盲区范围进行监测,对进入该区域的目标进行报警提示。系统满足激活条件时,盲区监测的报警功能在以下情况任意一种发生时生效:①当有目标车辆的任意部位从后方进入报警区域时,立即进行报警;②当本车以一定速度超越目标车辆,目标车辆进入报警区域时,可以设定满足国标要求的延时,若目标仍处于盲区范围,则进行报警,反之,则不报警。
当本车行驶速度小于15km/h或车辆处于倒挡状态时,系统进入待机状态。
4) 系统故障:当系统检测到故障无法继续工作时,系统进入故障状态,待故障清除后系统可进入激活状态。
4 结束语
本文以布置在载货车前轮挡泥板上4个77GHz毫米波雷达为主体,实现盲区监测功能,通过探测车辆盲区中的目标车辆对驾驶员予以提醒,从而有效避免变道过程中由于后视镜盲区而发生的事故,提高了驾驶辅助作用,对后续开发ADAS相关功能奠定了基础。
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
铁道通信信号(2018年12期)2019-01-31
资源再生(2017年4期)2017-06-15
中国新闻周刊(2017年21期)2017-06-15
汽车文摘(2015年11期)2015-12-02
中国卫生(2015年5期)2015-11-08
汽车零部件(2015年8期)2015-06-23
专用汽车(2015年1期)2015-03-01
汽车科技(2015年1期)2015-02-28
客车技术与研究(2014年6期)2014-02-28
