
以竞赛项目为载体的控制技术基础课程改革
2023-01-13 12:04曹忠亮巢渊丁力黄明单文桃
高师理科学刊 2022年11期
曹忠亮,巢渊,丁力,黄明,单文桃
以竞赛项目为载体的控制技术基础课程改革
曹忠亮,巢渊,丁力,黄明,单文桃
(江苏理工学院 机械工程学院,江苏 常州 213000)
在工程认证背景下,针对当前机械工程领域内学生利用理论知识解决复杂工程问题较差的情况,在机械工程控制类课程控制技术基础教学中,强化竞赛式或项目式教学环节在课程内容体系中的作用.提出了以学生竞赛项目“小型无人分拣控制系统设计”融入课程实验教学改革方案中,以竞赛为导向,培养学生工程知识学习、复杂工程设计/开发解决方案的能力.教学改革运行的效果良好,改革后的教学能激发学生的学习兴趣,不仅提升了学生的理论与设计相结合能力,还有利于提高学生的创新能力.
控制技术基础;竞赛项目;课程改革
随着机电一体化技术的快速发展,控制理论在机械工程学科中的应用越来越受到重视.控制技术基础是机械大类专业课程体系中一门重要的技术基础课,也是大部分工科专业的必修课程.课程主要应用经典控制论中的基本概念和基本方法来为机-电-液系统建模、分析和校正.该课程为流体传动与控制、电机与拖动、计算机控制、电气控制基础等专业课程运用控制理论提供基础知识,在课程体系中具有承上启下的重要作用.通过控制技术基础课程多轮教学后发现,学生对日常教学比较厌倦,对课程中涉及到的数学建模、系统分析、传递函数等基础知识不能很好消化理解及应用,无法与实际设计应用相结合,亟需对控制技术基础课程进行改革.
当今移动机器人是智能机器人领域研究的一个重要分支,凭借其自动化程度高、安全可靠、适用性广等特点被广泛应用在无人分拣中[1-3].路径规划控制作为移动机器人的核心技术,直接影响其在分拣搬运任务过程中的效率及安全性.本设计主要研究小型无人分拣系统的路径规划控制部分,其主要涉及分拣搬运场景的环境建模方案设计,分拣搬运过程中的导航与路径规划控制问题研究.针对全局路径规划控制中存在的遍历节点数多等问题,提出一种基于动态加权启发函数的改进A*算法,提高全局路径规划的效率和路径平滑度;针对多车运行中可能发生的任务重叠和路径冲突等问题,应用基于“领航者-跟随者”的多车编队算法,实现多车编队行进.本文针对中国工程机器人竞赛中“小型无人分拣控制系统设计项目”为载体,将控制技术基础课程中涉及到的基础理论知识与竞赛项目设计相联系进行课程改革,改革后的教学能激发学生的学习兴趣,不仅提升了学生的理论与设计相结合能力,还有利于提高学生的创新能力.
1 面向小型物流场景的AGV路径规划总体方案设计
1.1 方案设计
对小型物流场景下的AGV路径规划进行需求分析,并按照任务要求和工作场景制定总体方案.针对定位与环境建图、导航与避障、多车协同等问题进行小型无人分拣系统路径规划方案的总体设计与系统开发平台的选择.首先,提出设计所依赖的ROS(Robot Operating System,机器人操作系统)与仿真平台,然后阐述了本设计的软件开发平台总体设计方案;其次,对定位与环境建图、导航与路径规划、多车协同等功能模块进行了算法比较及选用[4].
本设计依托ROS机器人操作系统实现路径规划算法,其软件平台的总体框架包括2个算法模块及1个机器人模型模块(见图1).ROS机器人操作系统作为小型无人分拣系统路径规划程序开发的主要系统框架,以便于配合团队中通讯、控制、货物识别等各功能的搭载.

图1 软件平台总体功能模块
1.2 导航与路径规划模块方案
在小型物流场景中,AGV路径规划是指在已建好的二维地图上,根据相应的算法从起始点到目标点之间寻找一条无冲突的最短路径.主流的路径规划算法有基于搜索、基于采样和基于智能仿生算法3类[5-6],常见路径规划算法对比分析见表1.

表1 不同路径规划算法的优缺点
基于搜索的算法主要有Dijkstra算法、A*算法等.A*算法与Djkstra算法相比,增加了启发函数,以便于在搜索过程中进行启发式估计,极大提升了搜索效率,同时保证了路径的最优性,但不适用于在环境复杂的大空间场景;基于采样的算法主要有RRT(Rapidly-exploring Random Trees,快速拓展随机树)算法、RRT*算法,它们应用于动态障碍物、高维状态等微分限制的情况下,但代价大、实时性差、最佳性差;智能仿生算法是以模拟生物进化、昆虫觅食、筑巢等行为为对象,主要包括遗传算法、蚁群算法等,适用于求解和优化复杂问题,具有一定的并行能力,但运算速度缓慢,解早熟.根据小型物流场景空间小、特征环境低等特点以及对物料运输投送过程中高效率和高准确性的要求,综合搜索效率和路径有效性的考虑,选取A*算法作为本文无人分拣系统的全局路径规划算法,并在原有的基础上加以改进,以提高搜索效率,提高路径平滑度.
2 AGV路径规划研究
2.1 AGV单车路径规划研究
对现阶段视觉SLAM和激光SLAM进行对比后,确定选用点云计算量小,计算便捷,测距准确且不易受光照影响的激光SLAM进行本设计的环境建模方案,并对比选用基于滤波的Gmapping算法.粒子滤波的核心策略是随机采样,主要包括初始化、搜索、决策及重采样4个阶段.在初始化过程中,对AGV的位姿进行初始化;在搜索过程中,粒子被随机分配,然后通过反馈获得目标相似度信息;在决策阶段,通过加权和近似随机样本,代入概率密度函数,求取近似积分,最后得出粒子权重;在重采样阶段,根据权重的比例复制粒子并重新分配.粒子滤波算法将重复上述过程,并最终完成地图估计.主要工作流程见图2.
为了解决因粒子过多而引起的庞大运算,Gmapping算法从改进提议分布和选择性重采样入手,降低粒子数量,避免因重复采样而引起的粒子耗散问题.在现实场景中Gmapping算法适用于空间较小、特征环境简单的室内场景下进行定位与建模.
2.2 AGV多车协同路径规划研究
无人分拣系统中,AGV单车的路径规划只需要在得到的栅格地图上确定出发点和目标点,搜索出一条最短路径.针对AGV多车的路径规划问题,如何解决分拣任务的分配,避免AGV多车在行进中的路径冲突,是实现小型物流场景下AGV多车安全高效完成物料搬运的首要任务[7-8].小型无人分拣系统的运行空间来看,可简化为出发区、取货区及投放区,同时存在包含建筑物和固定货架的固定障碍物,以及包含行人、运行中的配套机械的随机障碍物(见图3).考虑到AGV单车的功能及多车协同上的分拣运输效率和任务分配,采用多车编队行进的移动方式可以有效避免各车之间单独行进的碰撞冲突,提高多车运行中的安全性,减少运输空间的占用和任务分配的复杂度.

图2 粒子滤波算法流程
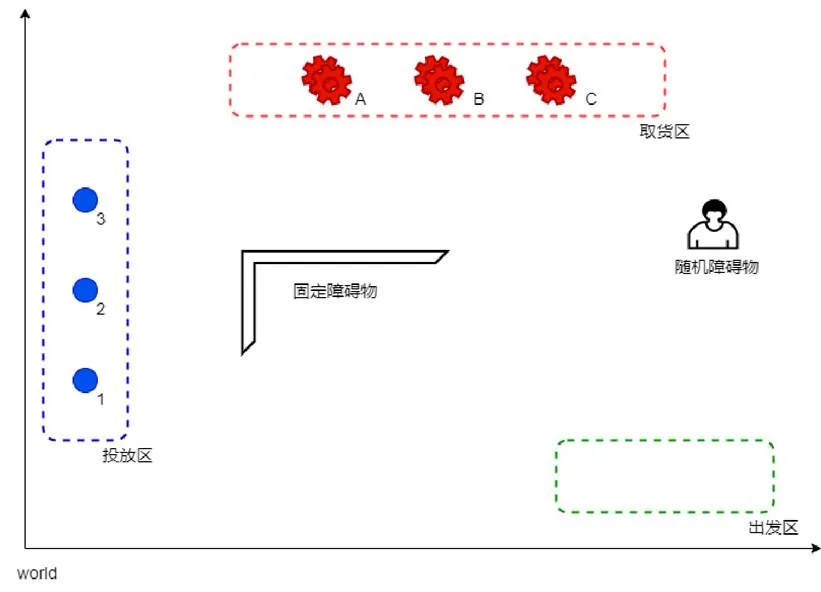
图3 分拣工作场景示意图
3 仿真结果与分析
3.1 AGV单车建图功能仿真
为验证本文所设计的路径规划环境建图算法的可行性和有效性,在Gazebo仿真软件中建立环境地图(见图4).左半部分主要用于无人分拣系统的多点发布和多车编队的运行场景,右半部分主要用于全局及局部路径规划算法的验证.同时,需要提前配置好AGV的里程计信息和雷达信息.

图4 仿真环境场景
3.2 AGV多车编队协同功能仿真
为验证多车编队协同方案的有效性和稳定性,需要将URDF模型以3辆AGV的形式导入到Gazebo仿真环境中,并对每辆车的命名和tf坐标进行区分,来实现各车的坐标发布和跟随,跟随效果见图5.3辆AGV以三角编队直线行进,领航者在前,跟随者在两翼保持编队以相同的速度前进.当手动将其中一个跟随者AGV拖离编队,以改变跟随者位置时,可见被拖离车辆将加速追赶编队,最终恢复编队阵型(见图6).
当手动将领航者AGV脱离编队,改变领航者位态时,可见2辆跟随者AGV加速追赶头车,并根据头车位姿旋转行进角度,最终实现编队恢复.仿真结果表明,应用“领航者-跟随者”算法能够有效避免各车之间发生碰撞,并能够在编队受到干扰后进行动态恢复,验证了算法的可行性和有效性.
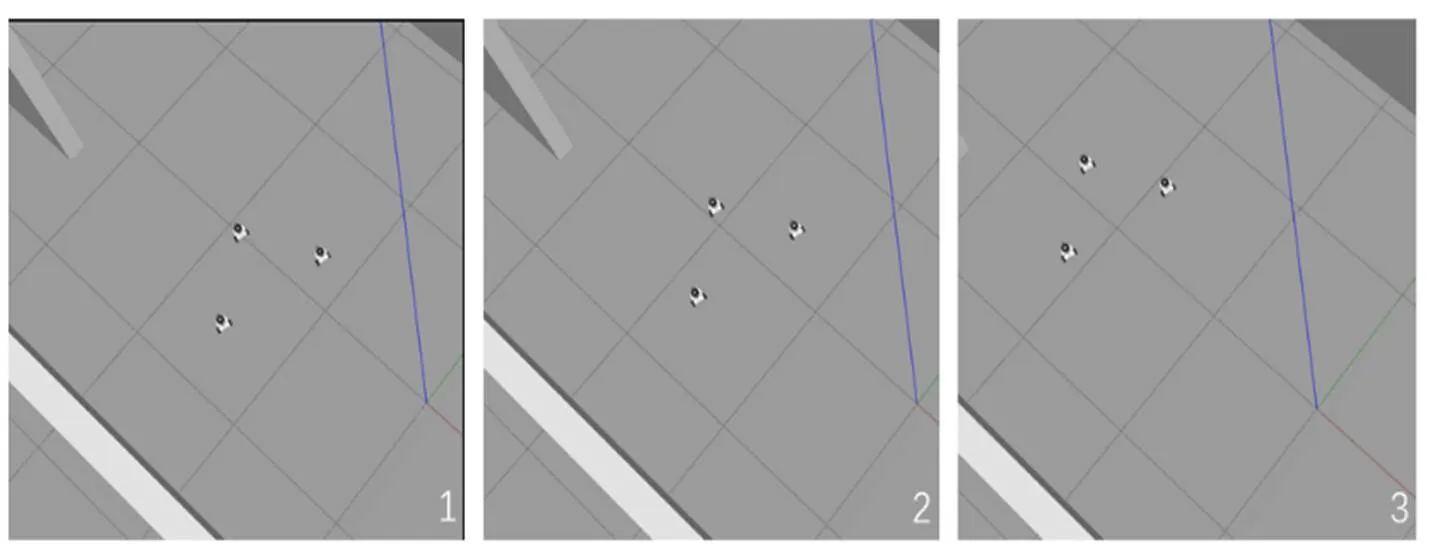
图5 AGV多车编队行进效果
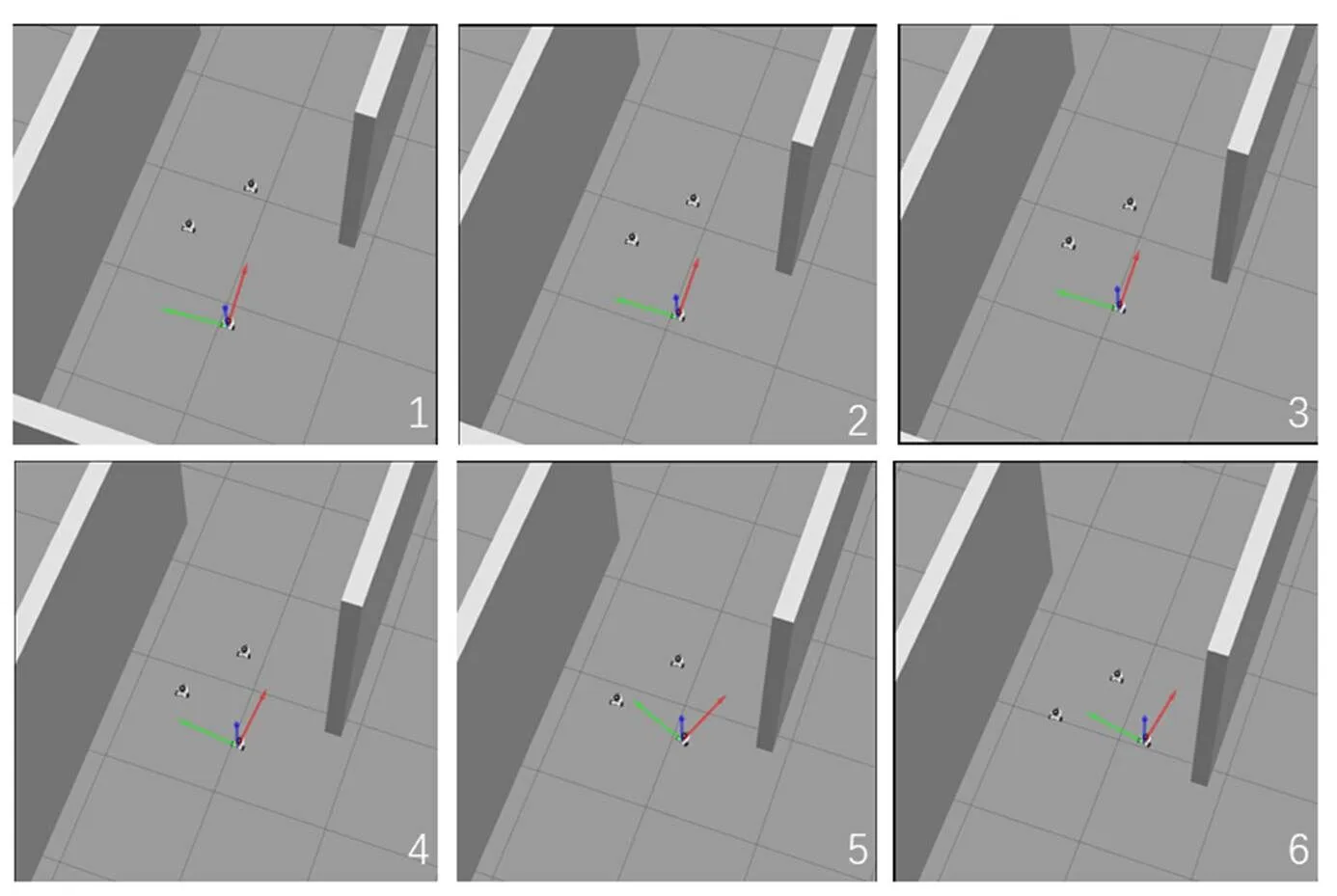
图6 干扰“跟随者”位置时编队的恢复效果
4 教学改革总体评价
通过引入中国工程机器人大赛竞赛项目“小型无人分拣控制系统设计”融入教学环节在课程内容体系中,改革后的教学能激发学生的学习兴趣,学生可以很好地将理论知识转化到实际应用场景.例如:数学建模、电机控制、传感器技术等基础理论,在程序编制、模型建立、系统分析等方面得到较大提升,提升了学生的理论与设计相结合能力,还有利于提高学生的创新能力,教学改革运行的效果良好.
以竞赛为导向,培养了学生工程知识学习、复杂工程设计/开发解决方案的能力,在理论成绩方面逐年提升.将教学项目与竞赛项目有机融合,为全国大学生机械创新大赛、互联网+大赛、“挑战杯”全国大学生课外学术科技竞赛、中国工程机器人大赛等各类赛事提供后备人才和锻炼机会.
综上所述,本文以小型物流场景下的无人分拣系统AGV平台为研究对象,对环境建模以及路径规划问题进行研究,并在传统A*算法的基础上对启发函数进行动态加权,提高了全局路径规划效率,并对规划路径进行了平滑性处理.应用基于“领航者-跟随者”算法的AGV多车路径规划算法,实现了AGV多车高效地完成物料搬运任务.以竞赛项目为载体的课程教学改革,使学生得到了锻炼,学会了团队合作,真正体会了什么是专业知识与实践设计相结合,拓展了学生实际建模与设计能力,更好地提高学生的创新意识和创新能力.
[1] 杜壮.制造业服务化趋势明显机器人从“笼子”作业走向人机共融[J].中国战略新兴产业,2021(10):107-119.
[2] 余娜娜,李铁克,王柏琳,等.自动化分拣仓库中多AGV调度与路径规划算法[J].计算机集成制造系统,2020,26(1):171-180.
[3] 郭心德,丁宏强.离散制造智能工厂场景的AGV路径规划方法[J].广东工业大学学报,2021,38(6):70-76.
[4] 张国荣,王志亮,赵振栋,等.移动机器人同时定位与建图研究综述[J].软件导刊,2019,18(10):5-7.
[5] 任伟建,高强,康朝海,等.移动机器人同步定位与建图技术综述[J].计算机测量与控制,2022,30(2):1-10.
[6] 王春颖,刘平,秦洪政.移动机器人的智能路径规划算法综述[J].传感器与微系统,2018,37(8):5-8.
[7] 赵鑫.移动机器人路径规划算法研究综述[J].电子元器件与信息技术,2021,5(7):239-240.
[8] 张开乐,陈兴文.基于激光SLAM实现AGV自主导航技术的仿真[J].山西电子技术,2021(5):32-34.
Reform of control technology fundamentals course with carrier of competition projects
CAO Zhongliang,CHAO Yuan,DING Li,HUANG Ming,DAN Wentao
(School of Mechanical Engineering,Jiangsu University of Technology,Changzhou 213000,China)
Under the background of engineering certification,in view of the current situation that students in the field of mechanical engineering use theoretical knowledge to solve complex engineering problems,it takes the teaching of the mechanical engineering control course control technology fundamentals as an example to strengthen competition-style or project-based teaching.It is proposed to integrate the student competition project small unmanned sorting control system design into the course experiment teaching reform plan,and take the competition as the orientation to cultivate students′ engineering knowledge and complex engineering design/development solutions.The teaching reform has achieved good results.The reformed teaching can stimulate students′ interest in learning,which not only improves students′ability to combine theory and design,but also helps to improve students′ innovative ability.
control technology foundation;competition project;curriculum reform
1007-9831(2022)11-0091-05
TP13∶G642.0
A
10.3969/j.issn.1007-9831.2022.11.018
2022-05-12
江苏理工学院教学改革与研究项目(11610112121)
曹忠亮(1983-),男,黑龙江齐齐哈尔人,副教授,博士,从事控制技术、机电一体化研究.E-mail:caoliang-8302@163.com
猜你喜欢
建材发展导向(2019年13期)2019-08-24
电子制作(2019年7期)2019-04-25
北京航空航天大学学报(2017年3期)2017-11-23
中国广播(2017年9期)2017-09-30
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15
诗潮(2017年5期)2017-06-01
北京航空航天大学学报(2017年10期)2017-04-20
照明工程学报(2016年3期)2016-06-01
中南财经政法大学学报(2015年5期)2015-04-07
海军航空大学学报(2015年4期)2015-02-27
