无人机倾斜摄影测量三维建模及其精度分析
2023-01-15 08:31汤昭辉
北京测绘 2022年11期
汤昭辉 万 灿
(重庆交通大学 智慧城市学院, 重庆 400074)
0 引言
摄影测量技术在摄影技术发展的历史进程中经历了三个主要阶段,分别为模拟摄影测量阶段、解析摄影测量阶段以及数字摄影测量阶段,并且目前已经全方位地进入了数字摄影测量阶段[1]。倾斜摄影测量技术是将传统的航拍技术融入数字地面采集技术,在航空飞机上安装了多镜头相机或多种类型的感应器而构成的。此技术克服了传统航空摄影测量技术只能从竖直方向角提取地面图像的局限性,可以同时从竖直方向角和多个倾斜方向角得到影像数据,以达到获取反映地面真实情况的目的[2]。
无人机航空摄影测量技术提供了一种快速、高效地生产4D产品的技术,并且在地图测绘、城市建设、交通指挥、建筑物维修等方面扮演着积极的身份[3]。其中,4D指数字高程模型(digital elevation model,DEM)、数字正射影像(digital orthophoto map,DOM)、数字线划地图(digital line graphic,DLG)和数字栅格地图(digital Raster graphic,DRG)。由于倾斜摄影测量法的出现较晚,因此没有针对该模型精度的特定评估系统。然而,对倾斜摄影测量模型进行精度评价的同时也可以促进倾斜摄影测量技术的发展,这对将该技术应用于相关领域会更有帮助,因此要将重点放在建立三维模型的精度评价体系上[4]。
1 无人机低空航摄的主要流程
1.1 飞行准备
接受飞行任务,确定飞行实验区域,首先进行控制点测量,即在实验区均匀布设控制点,获取控制点的坐标,然后在进行航线的规划设计。
1.2 设置参数
根据实验区数据所要求的条件,确定好航线、航高、飞行速度以及重叠度的参数[5]。
1.2.1选择航高
根据影像的实际用途,联合各种比例尺成图的要求以及地面地形情况,再参考测图比例尺精度,即测图比例尺及其对应的地面分辨率选取相应的地面分辨率,最后根据式(1)得到航高[6]。
(1)
其中,H摄影航高;D为地表分辨率;f为物镜焦距;i为相机像素尺寸。
1.2.2影像重叠度
根据相关规范,像片重叠应该满足以下基本要求:航向重叠度在通常情况下应该为 60%~80%,但不得小于53%;旁向重叠度在通常情况下应该为 15%~60%,但不得小于8%。
1.2.3航线设计
按照测区尺寸大小,制定出无人机飞行航向和航线的长度,并且航线的数量不少于6条且为双数,还有就是按照表达式计算摄影基线的长度,由式(2)、式(3)推算出航线间隔宽度[7-9]。
其中,Lx为实验区实地航摄长度;Wx为航线旁向间距;Ix为幅长;Iy为幅宽;Cx为航线重叠度;Cy为旁向重叠度。
2 研究区域与数据
2.1 研究区域
本次实验采用了河北工程大学新校区部分场地为试验区域。河北工程大学地处于河北省邯郸市偏东部区域。校内有格式建筑,如教学楼、图书馆、宿舍园地等。本次实验区的经纬度范围为:114°35′34.44″E~114°35′50.68′E,36°39′23.36″N~36°39′37.01″N,南北方向长504.61 m,东西方向长506.74 m。
2.2 航摄数据
本研究采用河北工程大学新校区部分场地的影像,其航摄影像数据总共有332张,包括垂直影像数据和倾斜影像数据。为保证影像数据的完整性,飞行航摄的范围要稍微大于实验区域的范围,试验区域航摄的相关参数如表1所示。本次的影像数据大小为12.1 GB,经检验筛选,其质量过关。
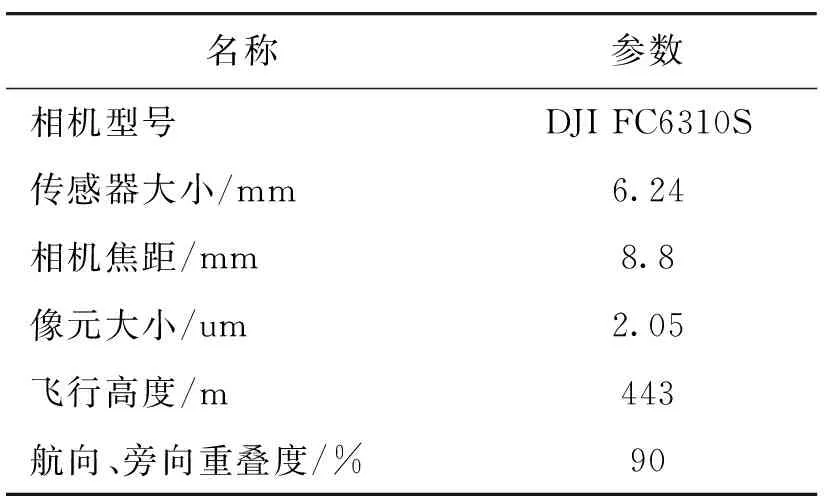
表1 航摄技术相关参数
2.3 控制点数据
在试验区布设并测量了12个像控点点,均匀分布在试验区内,坐标系统为CGCS2000坐标系统。其中,6个为建模使用到的控制点,剩下的内部检查点用于对模型精度的绝对精度进行评价。
3 研究方法
通过无人机倾斜摄影测量技术对河北工程大学新校区进行航摄,获得相应的影像数据,利用Smart3D 进行实景三维模型的建立,得到试验区的DOM、DEM、数字地表模型(digital surface model,DSM)以及三维点云;最后进行初步的精度评判或者某些独特的设施进行理论上的精度评判,然后在试验区选取特定检测点,通过外业的实地测量得到待定点的坐标数据,从而评价实景三维模型的具体精度状况,分析可能的影响因素[10-11]。具体技术路线如图1所示。
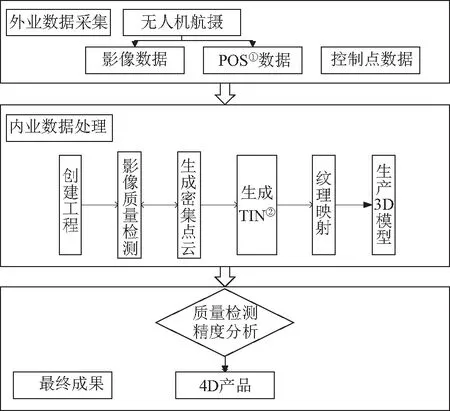
注:①定位定姿系统(position and orientation system,POS);②不规则三角网(Triangulated Irregular Network,TIN)。图1 技术路线
3.1 基于Smart3D构建三维模型
为保证后期建模成果的质量,建模前应注意航摄影像数据采光情况以及图像畸变等问题[12]。利用Smart3D构建试验区域的三维建模。
三维建模的成果可在Acute3D Viewer 界面进行浏览。经过匹配、内定向、约束平差、空中三角测量等生成三维实景模型如图2所示。
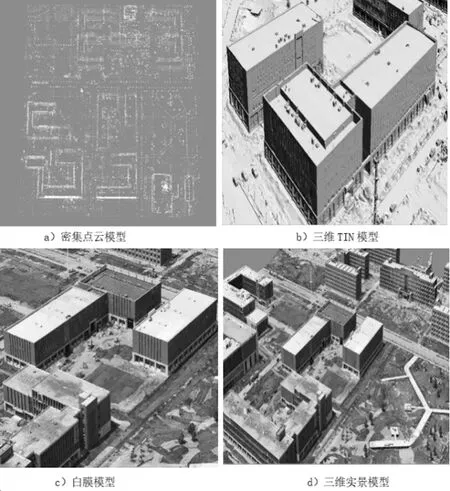
图2 三维模型生成
3.2 模型精度评价及分析
3.2.1相对精度
对于Smart3D构建出的三维模型,首先可以从相对精度上对模型进行分析[13]。相对精度分析即是通过对特征明显的地物,如建筑物、跑道、走廊等,并用测距仪、全站仪等测绘仪器多次量测取平均值;然后打开模型并找到与实地测量相对应的地方,利用量测工具测出对照值;最后计算出模型量测值与实地测量值的偏差并分析结果。
使用毫米级测距仪和全站仪量取了试验区内教学楼、楼道、道路的长度和高度,记录下测量地点。为了确保精确度的准确性,距离量取是尽量使量取时的高差小于1 cm,如表2所示。
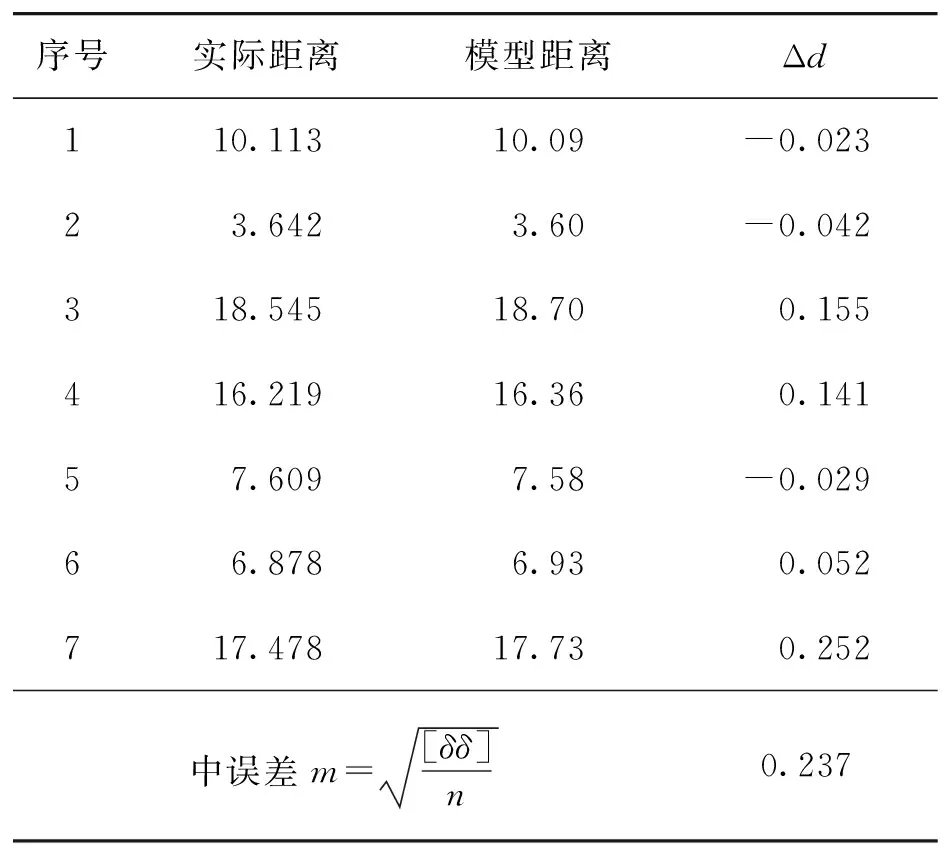
表2 相对精度对比分析 单位:m
从表2中可以看出模型长度误差大为0.252 m,最小误差为-0.023 m,相差了0.228 m,并且中误差为0.237,其误差都要低于0.3 m。其中第7组为建筑物间距测量,第3组和第4组为建筑物的高度测量,其余的为建筑物、道路、阶梯、长度测量,从数据结果和测量方式来看,可以得到以下两个结论:①第7组的误差最大,测量的是建筑物之间的距离,丛图高差有-12.37 cm,因此可能产生的原因是测量时的距离是斜距,而需要的是平距;②第3组和第4组误差其次,测量的是建筑物的高度,因此可能产生的原因是模型生产时角点的偏差较大。剩下的误差都比较小,精度较高。
综上所述,在模型中进行量测时,应该尽量选择高差相差不大、遮挡物较少的地方,并且选择要选择清晰的角点量取高度。
3.2.2绝对精度
建立三维模型很重要的方面是代替大比例尺测图,为了解决本次所构建的三维模型是否能达到其要求的精度这个问题,以下将计算绝对精度[14]。
(1)平面精度:加载模型,并用内置工具测量待定检测点的坐标,最后与实测控制点对比求得中误差。查阅相关规范得到大比例尺测图地物点平面相关精度要求。
控制点与模型待定点的坐标对照如表3所示,为了确保数据的保密性,控制点前三位数用*号表示。其中,X为控制点横坐标;Y为控制点纵坐标;Z为控制点高程;X′为三维控制点横坐标;Y′为三维控制点纵坐标;Δx为X与X′的差值;Δy为Y与Y′的差值;Δxy为平面误差。
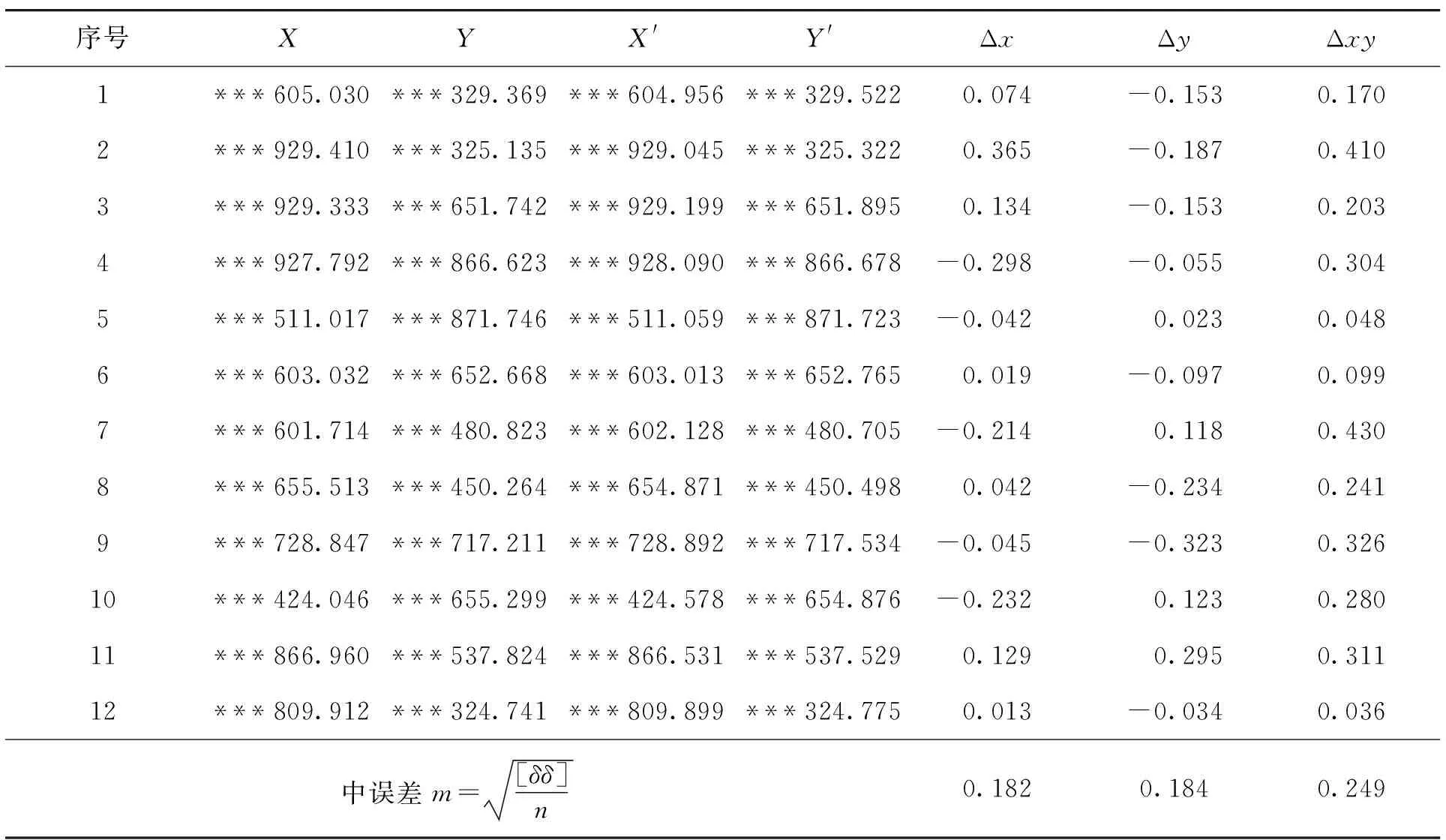
表3 平面点精度分析表 单位:m
从表3中可以得出结论,模型平面精度的情况为:该模型的X方向的中误差为0.182 m,Y方向的中误差为0.184 m;最大平面坐标误差为0.430 m,最小平面坐标误差为0.036 m,平面坐标中误差为0.249 m小于0.25 m,其精度刚好满足大比例尺测图的精度要求。
(2)高程精度:同平面精度的评价方式相同,通过量测模型上的相应控制点的高程,在与实际控制点的高程对比计算出相应的误差,最后进行分析评价。
控制点与模型待定点的坐标对照如表4所示。
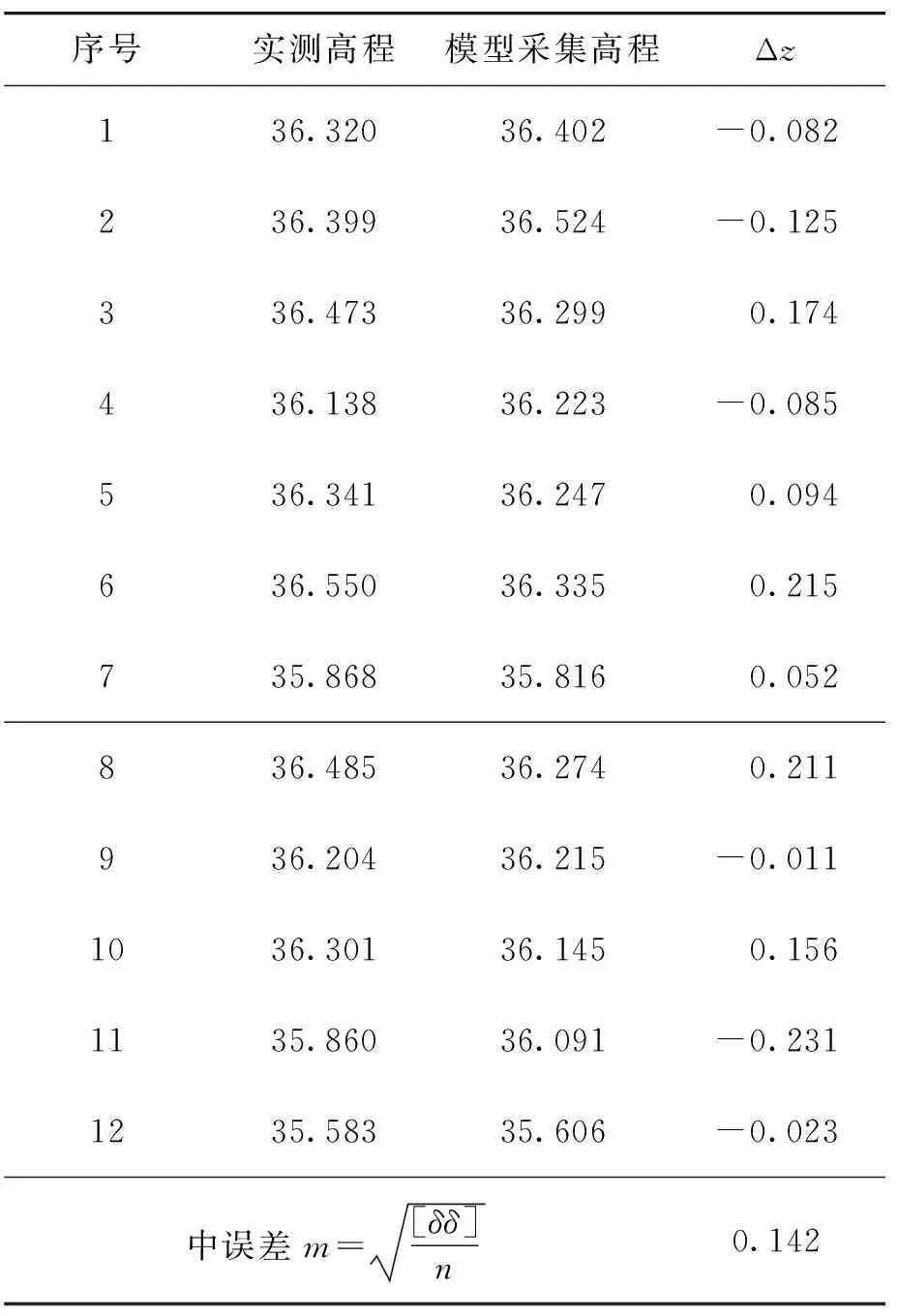
表4 高程精度分析表 单位:m
从表4可知,该模型的高程误差没有明显的规律性,且正负偏差的个数都相差一致。其最大误差为-0.231 m,最小误差为-0.011 m。查阅地形图的高程精度要求可知,高程中误差为±0.142 m,小于大比例尺测图规定的0.5 m的1/3,即0.17 m,满足大比例尺的精度要求。
3.2.3房屋角点精度
为研究模型房角点的坐标精度是否满足大比例尺测图的规范要求以及宅基地的精度[13],在模型上量测并验证了9个角点坐标。通过全站仪实地测量相应角点坐标,与模型坐标对比计算分析其误差,得到如表5所示的结果。
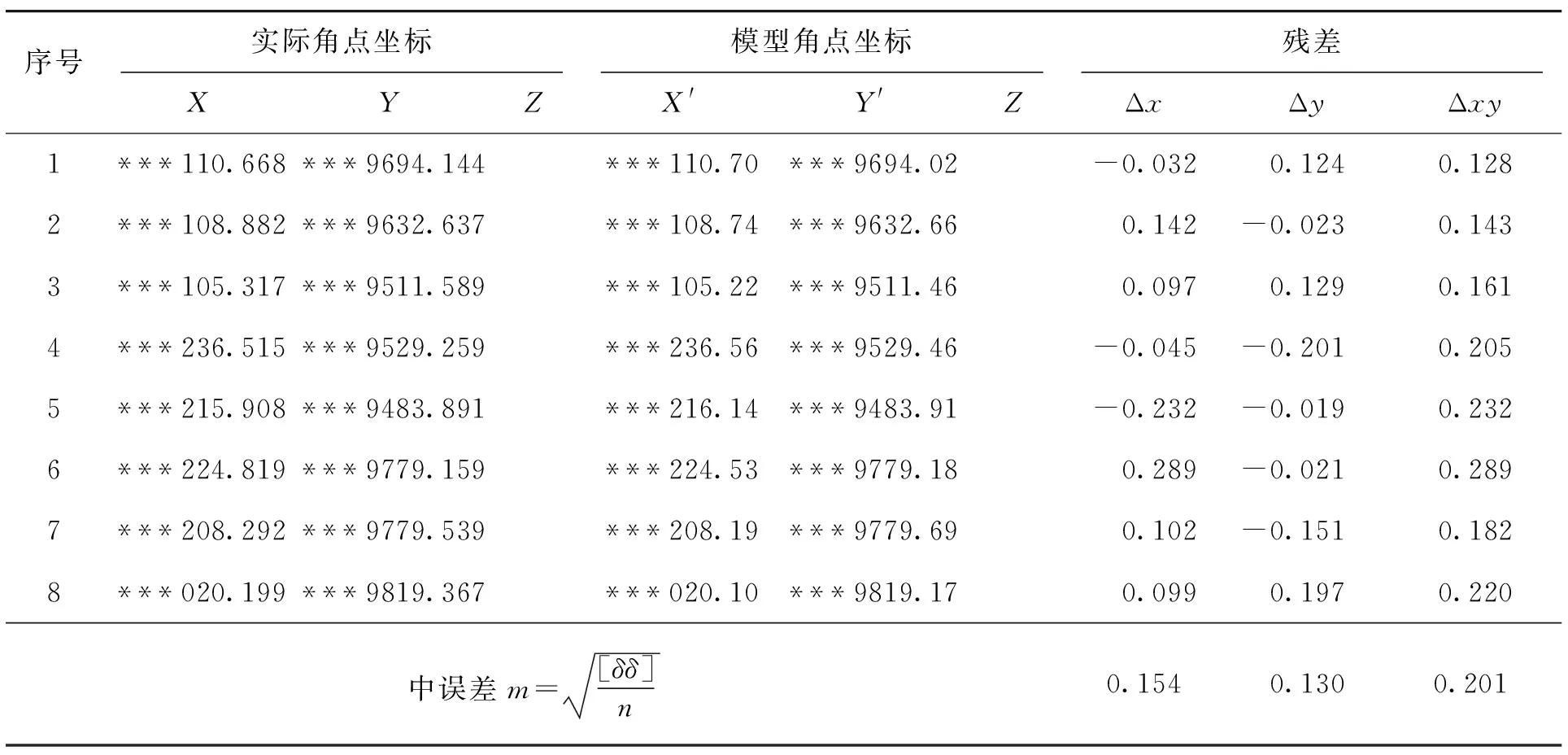
表5 建筑物角点误差 单位:m
从表5可看出,X方向上的中误差为0.154 m,Y方向上的中误差为0.130 m,坐标中误差为0.201 m。对于1∶500比例尺的数字测图来说,其精度只有Y方向上的中误差小于0.15 m,满足精度要求,另外两个都大于0.15 m,但与相差的不是很大。因此产生此结果的原因可能是如上文提到的角点模型生产时角点的偏差较大。
3.2.4结果分析
从以上的精度结果中可以看出,三维模型的误差没有特定的规律,但分布范围相对均衡。其中,相对精度中的长度和高度误差都小于0.3 m,且分析出几点产生误差较高的原因;平面坐标中误差,高程中误差为±0.142 m,小于大比例尺测图规定得0.5的1/3,即0.17,都满足《三维地理信息模型数据产品规范》的规定;房屋角点误差要高于1∶500比例尺的数字测图相关规范的精度要求,但相差都不大。
4 结束语
随着倾斜摄影测量技术的发展,尽管目前的一些算法有较好的匹配效果,精度也能满足小比例尺的测量,但是这还不能满足高精度产品的要求,并且匹配的速度也比较慢。因此接下来需要研究出更高精度、高效率的影像匹配算法来弥补上述的不足。倾斜摄影测量是近几年才发展起来的新兴技术,相应的精度评价系统还不够完善,则今后需要找到以更加高效、精确的评价因子,研究出一些更加科学、严谨的评价模型。
猜你喜欢
计算机应用与软件(2022年12期)2023-01-31
计算机仿真(2021年8期)2021-11-17
全球定位系统(2021年1期)2021-03-26
当代陕西(2020年23期)2021-01-07
电子技术与软件工程(2018年10期)2018-07-16
消费导刊(2017年8期)2018-01-18
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
全球定位系统(2015年4期)2015-02-28
全球定位系统(2015年4期)2015-02-28