激光雷达在地下矿井障碍物检测中的应用
2023-02-11 12:16姚蔚利
河南科技 2023年1期
姚蔚利
(中国中煤能源集团有限公司,北京 100120)
0 引言
采矿业是我国国民经济的基础和支柱产业。近年来,随着传感器、人工智能、计算平台等技术领域的突破,应用自动驾驶技术是当前采矿业发展的重要趋势。由于矿山的作业环境恶劣、危险度高,采用自动驾驶技术可保护人员安全,且能大幅提升工作效率,更加经济、节能和环保[1]。应用自动驾驶技术可对周围环境进行实时感知,然后自主规划路径进行行驶或采矿作业。
自动驾驶技术通过相机、激光雷达、组合导航等传感器对周围环境进行实时感知,以获得周围环境的障碍物信息,这是保证自动驾驶车辆安全可靠行驶的前提。相较于相机,激光雷达具有感知精度高、不受光照影响的优点,受到学者们的广泛关注[2]。
国内外学者对利用激光雷达的障碍物检测技术进行了许多的研究工作。Vu等[3]利用栅格地图的方法对运动目标进行检测,并通过贝叶斯公式推理由传感器误差造成的栅格状态不一致性,来检测运动目标,但没有对更新后的后验概率进行修正。Azim等[4]基于八叉树网格法来检测运动物体,然后用密度聚类算法进行障碍物检测,但其网格绘制过程复杂,导致难度加大。Frederik等[5]提出点云数据实时分割算法,利用激光雷达垂直于水平分辨角,将聚类的欧几里得距离特性在保留三维测量信息的同时,利用图像距离公式将数据缩小到二维,从而加快计算,并引入跳跃检测法来改进过分割问题和部分遮挡问题。Yin等[6]提出VoxelNet检测网络,将特征提取和边界框预测统一到单阶段的端到端深度网络中,其将点云划分为等间距的3D体素,通过引入体素特征编码,并将其连接到网络,从而生成检测算法。VoxelNet算法对行人及骑自行车的人具有较好的识别效果,但该算法对原始数据比较敏感,且实时性较差。此外,现有研究中障碍物检测技术多是面向城市结构化场景,对地下矿井场景的研究并不全面。
针对以上问题,本研究提出一种面向地下矿井环境的基于激光雷达的障碍物检测方法。使用激光雷达时,先对点云进行地面分割,提取高程障碍物点云,再利用改进的DBSCAN算法对障碍物进行聚类,并对目标的三维边界框进行拟合。利用公开的数据集及地下矿井点云数据进行模拟试验,从而验证本研究所提出的算法能实现准确、稳定、实时的障碍物检测。
1 地面分割
先进行点云地面分割,由于地下矿井环境多为比较平整的路面,且一般存在坡度。因此,本研究采用基于多平面拟合的地面分割算法来提取高程障碍物点云。
1.1 基于多平面拟合的地面分割
点云数据包括点空间坐标( )x,y,z。算法先根据点云数据的距离分成三个区域,然后利用RANSAC算法分区域进行地面分割。RANSAC算法通过反复选择数据中的一组随机子集来完成目标。算法的流程如下。①在设置的迭代次数内,每次随机选取3个点来确定一个平面方程。②将所有点依次代入该平面方程中,根据设定的距离阈值进行判定,若在阈值范围内,则认为该点属于该平面的内点,否则为外点。遍历所有点后,统计内点个数。③在迭代次数内,内点数量最多的平面方程即为地面方程,该地面方程下的内点就是地面点云集,外点就是障碍物点云集。
迭代中对3个点进行平面拟合,采用的线性平面模型关系式见式(1)、式(2)。

式中:n=(a,b,c)T为平面的法向量;d为平面拟合模型常数;X=(x,y,z)T,通过代入3个点坐标(x,y,z)求解n。
通过分区域多平面拟合地面分割,实现对地下矿井存在坡度的地面与高程障碍物点云分割,提高地面分割的准确度。
2 障碍物检测
2.1 目标聚类
本研究采用DBSCAN[7]密度聚类算法,并根据点云密度随距离变化的特征,采用自适应阈值的改进方法。DBSCAN算法是一个具有代表性的基于密度的聚类算法,与划分层次聚类方法不同的是,其将簇定义为密度相连的点的最大集台,能把具有足够高密度的区域划分为簇,并在有噪声的空间数据库中发现任意形状的聚类。DBSCAN算法是由密度可达关系导出的最大密度相连的样本集合。按照距离选择不同的邻域阈值来搜索核心对象,以此来适应点云的空间分布特点。
DBSCAN算法有两个主要参数,即邻域半径ε、簇最小点数MinPts。算法的流程如下,在点云数据集中任选一点作为起始点,按照给定的ε和MinPts,查找所有从这一点密度可达的点。算法根据点云密度随距离降低的特点,引入距离参数,在距离增大时,ε会随之增大,而MinPts随之减小,以此来保证在不同探测距离上,算法能自适应找到合理的参数组合。
DBSCAN算法对数据集中的异常点不敏感,根据距离特征来选择不同的邻域阈值,从而有效解决其欠分割与过分割问题。参数的匹配对聚类的效果影响很大,本研究通过对邻域阈值以及邻域样本数阈值进行联合调参,在地下矿井场景中的夯道环境中,对近处及远处的目标均能获得良好的聚类效果。
2.2 目标三维边界框拟合
在获得障碍物的点云聚类簇后,为更准确地描述目标的特征信息,要对聚类簇进行三维边界框拟合,从而获得目标的尺寸、位置、朝向等特征。由于地下矿井场景中目标多为矿用车辆、矿工等,采用凸包矩形迭代拟合的方法来获得目标的三维边界框。
凸包矩形迭代拟合方法的算法流程如下。①将点云聚类簇投影到二维平面,并获得其凸包多边形[8]。②对凸包多边形的相邻两点进行矩形拟合,矩形的对边通过距离相邻两点连线最远的凸包点,并计算投影点云中的所有点到矩形四条边的距离,比较得到四个距离的最小值,并求和。③对凸包所有的相邻点进行矩形拟合,选择最小距离和最小的矩形作为最终的矩形拟合框。④结合点云聚类簇的z方向高度值来获得目标最终的三维边界拟合框。计算公式见式(3)、式(4)。
经过凸包矩形迭代拟合,从而获得障碍物的位置、尺寸、朝向等空间特征,实现了完整、准确、可靠的障碍物检测。
3 试验结果
3.1 KITTI公开数据集
本研究采用KITTI的检测数据集[9],KITTI数据集是由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办。KITTI数据集的数据采集平台装配有2个灰度摄像机、2个彩色摄像机、1个Velodyne 64线3D激光雷达、4个光学镜头以及1个GPS导航系统。本研究选择激光雷达点云数据进行测试。
本研究所提出的算法的障碍物检测效果鸟瞰可视化效果图如图1所示。其中,网格中心处为车辆原点位置(激光雷达位置),包围框表示障碍物检测结果。环境中运动目标较多,场景多样,运动复杂度较高,显示了该算法障碍物检测结果较为可靠,验证了该算法的可行性与有效性。
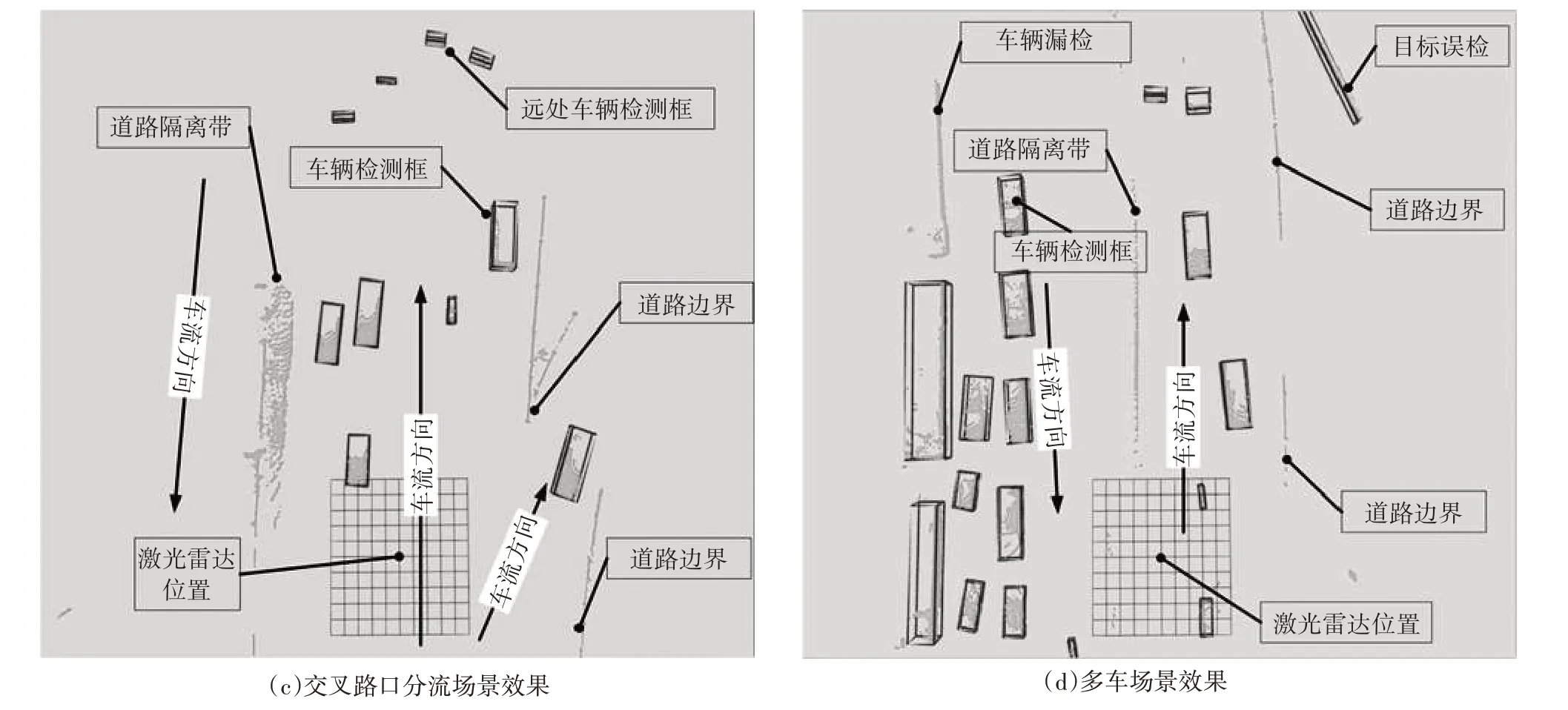
图1 障碍物检测效果鸟瞰图
3.2 地下矿井数据集试验
经过离线的仿真算法验证,本研究再利用地下矿井数据集进行试验验证,数据集由搭载激光雷达和组合导航的矿用车辆在地下矿井进行录制采集,具有与实车测试几乎相同的试验条件。
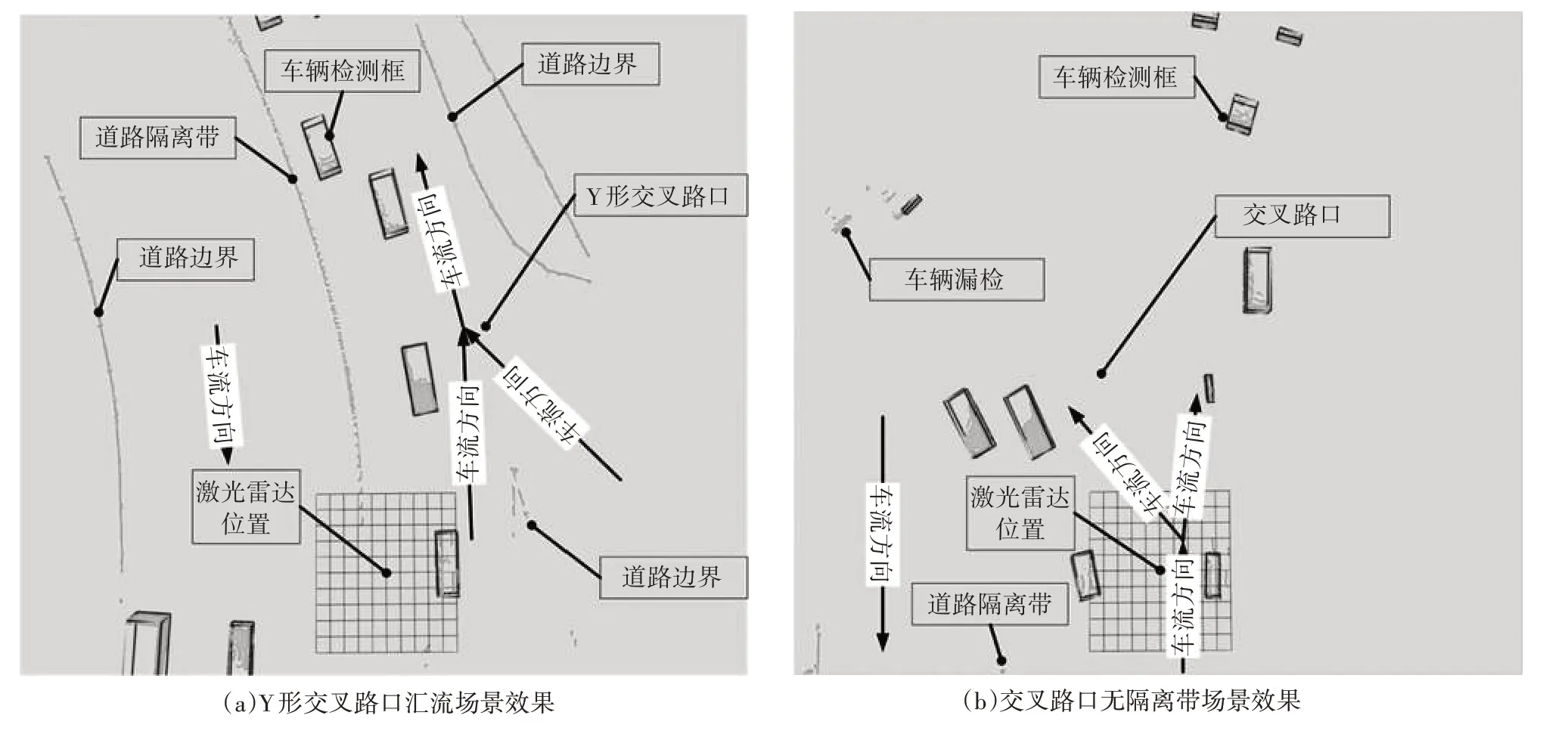
在地下矿井数据集试验中,选择典型场景对障碍物检测的结果进行可视化展示,如图2所示。在这两个场景中,环境中的目标均为矿用车辆。其中,网格中心处表示数据采集车辆原点,包围框表示障碍物检测结果。由图2可以看出,障碍物检测算法对地下矿井环境中目标的拟合效果较好,对矿用车辆等进行了较为准确的拟合。此外,本研究提出算法的实时性也得到了验证,经过仿真试验与地下矿井数据集试验验证,本研究提出的地下矿井障碍物检测算法满足可行性与有效性,得出了较为准确的障碍物检测结果。
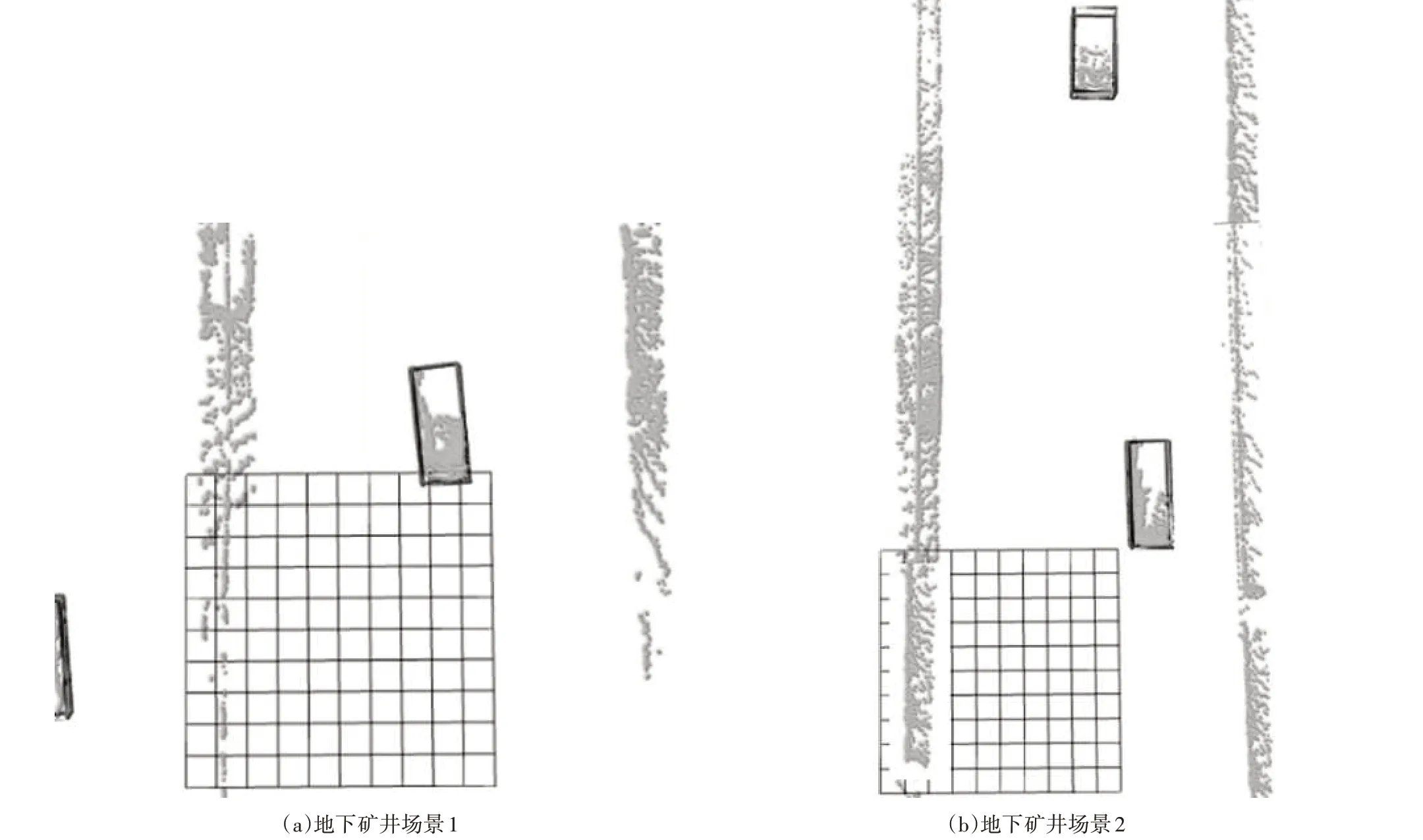
图2 地下矿井数据集检测结果
4 结语
本研究对基于激光雷达的地下矿井障碍物检测算法进行了研究,重点研究多平面拟合地面分割算法对坡度路面有较高的鲁棒性。同时,采用改进的自适应阈值的DBSCAN聚类算法进行障碍物检测,再利用凸包矩形迭代拟合方法进行三维边界框拟合,完成对地下矿井障碍物检测算法流程。经过仿真及实车数据集试验分析,本研究提出的算法满足可行性与有效性,能实时准确地实现对地下矿井环境中障碍物的检测。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
数学年刊A辑(中文版)(2020年2期)2020-07-25
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
中学生数理化·八年级数学人教版(2017年4期)2017-07-08