基于三维激光扫描的高精度大坝变形监测技术研究
2023-02-15 13:46范泯进朱燕梅张宏达苟家强
水利技术监督 2023年1期
范泯进,朱燕梅,张宏达,陈 伍,苟家强
(四川中水成勘院工程物探检测有限公司,四川 成都 610072)
大坝在运行过程中受库区水位和其他地质因素影响,大坝坝体可能在沿着坝轴线或垂直坝轴线方向上产生变形,而当此种变形达到一定程度后会危及大坝安全。所以,大坝变形监测是贯穿于水电站建设、运行全寿命周期的重要工作内容。目前在大坝变形监测中常用的人工变形监测系统和自动化变形监测系统等,多采用“点”布设方式在大坝坝体或廊道内局部断面安装监测设施。这种布设方式下监测断面间距一般较大,所采集的形变数据也集中在断面附近,不能全面、连续、完整反映大坝形变情况。这些监测中的“盲点”区域,在水电站的整体平稳运行中存在一定安全隐患。
随着测绘技术的飞速发展,高精度三维激光扫描技术运用到大坝安全监测中。该监测技术可在有效测程范围内提供高密度、高精度点云数据,构建三维模型数据场,能够全面准确的反映大坝坝体的形变、裂缝发育、表面破损等细节信息。并以“全方位、无死角”的方式记录下大坝各个部位、在各个时期的运行状态;以“三维变形监测、三维实景记录”的方式在高精度下记录大坝廊道内“可见”和“不可见”信息,形成详细完整的大坝运行健康档案。
1 三维激光扫描技术
三维激光扫描技术主要通过三维激光发射器发出激光脉冲信号,以基于“面”的数据采集方式和亚毫米级测距精度,采集有效测程范围内扫描目标体的高密度、高精度点云数据。此外,可以通过同步影像采集系统,获取扫描目标体的“实景三维影像”信息。
通过后处理软件,对扫描获得的点云数据和影像数据进行处理转换,建构扫描体高精度、高密度的点云模型数据场。
2 数据采集与处理技术
2.1 点云径向密度去噪法
在水工隧洞和平面三维激光扫描中,由于激光扫描仪采用360度相位法方式扫描,在水、镜面等高反射率扫描面影响下将不可避免会产生噪点,而这些噪点的去除却十分繁琐,将耗费大量人力。因此,根据水工隧洞和混凝土结构面的特点,将其按几何结构进行轴向和径向微元划分,并通过对点密度和径向位移偏差分析,确定阈值进行去噪。
当扫描面处在扫描仪的最优扫描位时,将会形成高密度点云,而噪点分布则呈现零散、低密等特征。通过设置合适的断面角度微元径向点云噪点去除阈值,可以获得清晰完整的洞壁点云。如图1所示,隧洞局部桩号段采用径向密度去噪法处理前、后点云。
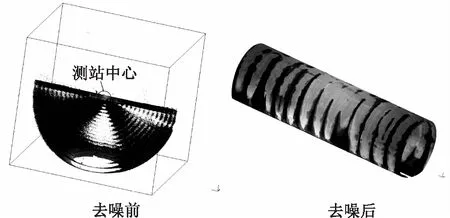
图1 点云径向密度去噪法处理前、后洞壁点云图
2.2 高精度点云缝合技术
三维激光扫描采集的点云数据量大,其单站扫描点数可达上亿,反映扫描目标表面信息详细而准确。然而由于测试表面与扫描仪存在距离差异、以及测试表面激光入射角度差异,将使得测试成果因测试表面多次扫描反射强度差异产生“雪花”点、以及由于扫描遮挡导致产生“漏洞”区域。
针对上述问题,通过研发“高精度点云去噪缝合技术”,采用专有算法充分利用每站扫描获取的高精度、高清晰数据,逐站进行匹配;并且对于单站扫描时被遮挡的无数据“漏洞”区域,采用多站优势高精度点云数据进行“漏洞缝合”;最终使得多站整体拼合图像清晰、细节特征明显,真正实现“实景还原”,不同扫描点云处理技术成果对比见表1。
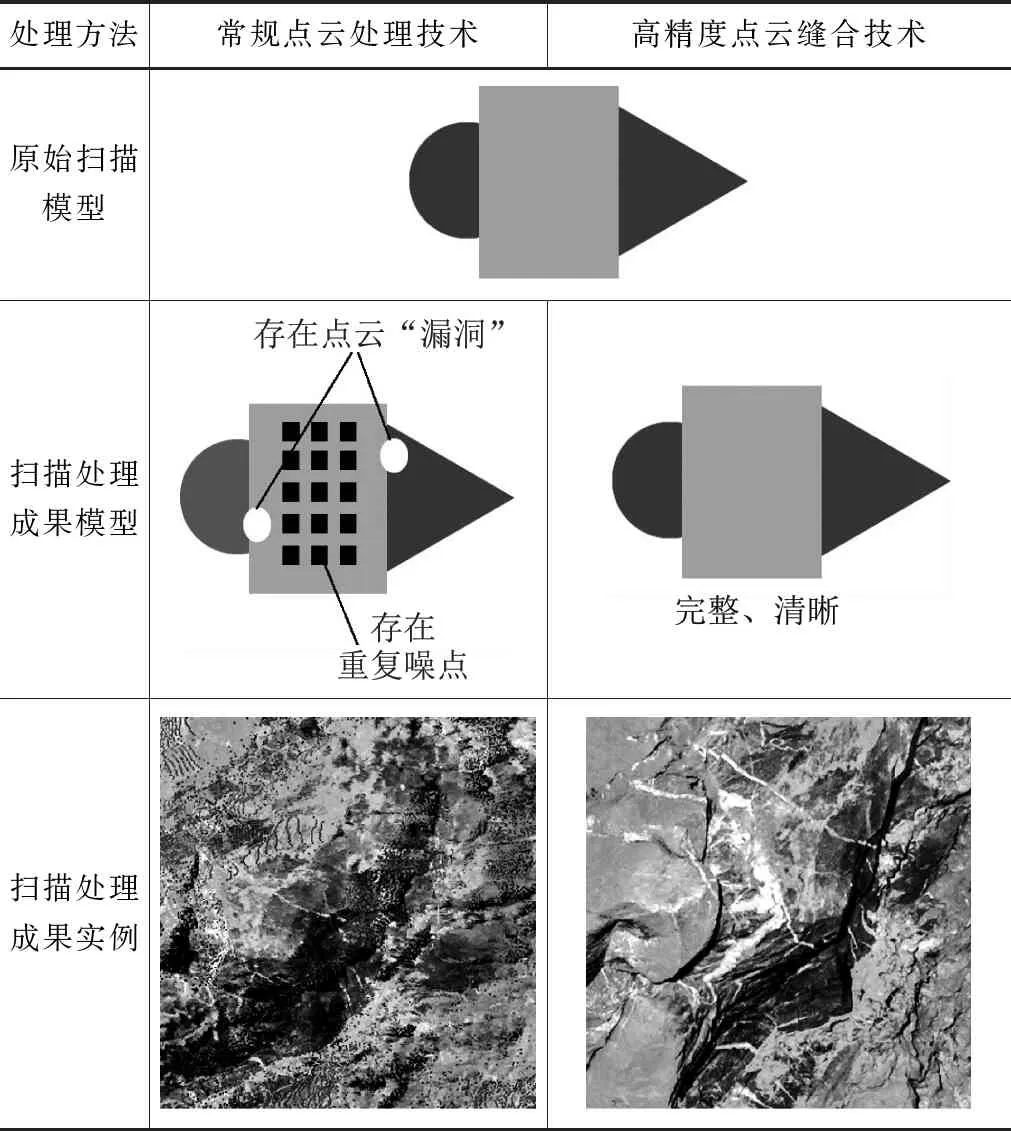
表1 不同扫描点云处理技术成果对比图表
2.3 改进的高精度形变分析算法
三维激光扫描的点云密度大、精度高,将三维点云数据场与设计模型或多期扫描数据进行计算分析,可反映扫描目标体的表面缺陷、位移、形变等情况,如图2所示。形变分析精度受点云精度和密度、环境噪点以及分析算法的影响,会存在一定的系统误差,该误差如果得不到有效控制或消除,会导致微小形变得不到反映或放大整体形变。通过分析水工隧洞实际结构特征,在国内外常用形变量分析方法的基础上采用改进的高精度形变量计算方法,实现形变量毫米级高精度提取分析。算法流程如图3所示。
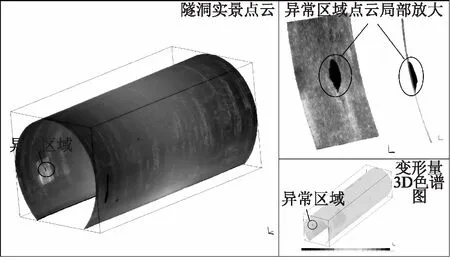
图2 三维激光隧洞形变分析成果展示图
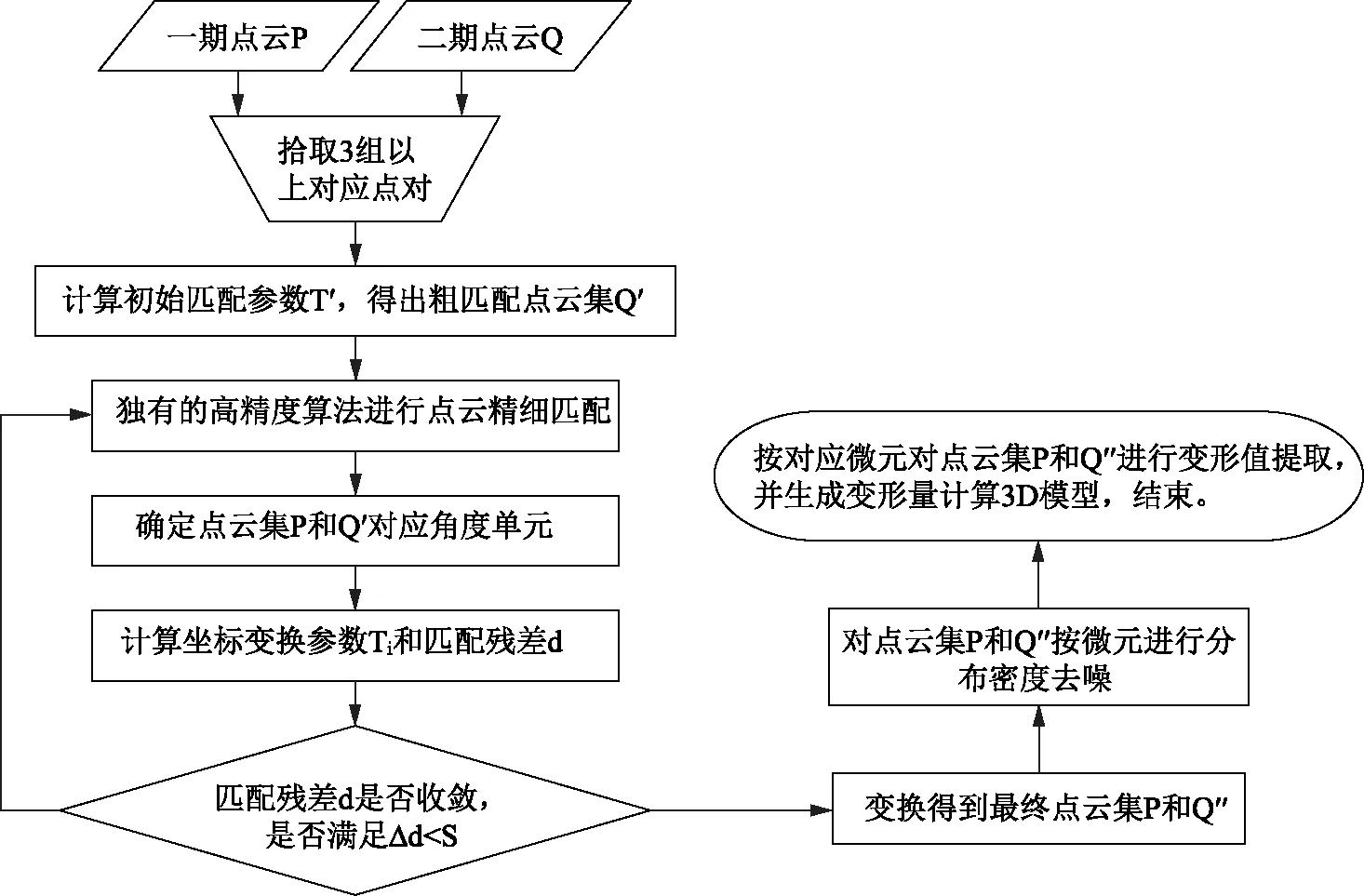
图3 隧洞形变分析算法流程图
3 三维激光扫描技术在大坝监测中的应用
3.1 测试情况简述
某大型水电站是控制性“龙头”梯级电站。通过在该水电站大坝1829m高程廊道分两期采用高精度三维激光扫描技术,监测在库水位1801m高程和1878m高程时大坝坝体整体形变情况。
3.2 现场布置与数据采集
3.2.1控制测量
通过与坝体控制点联测,并在各高程大坝廊道布置三维激光扫描测量控制点和测量控制点。其中,测量控制点布设置于洞内底板,扫描控制点采用专用靶球棱镜布设于洞内边墙。
3.2.2三维激光扫描现场布置
根据大坝廊道结构特征,三维激光扫描以4m间距布置测站,并同时采用高精度靶球棱镜、靶球与控制测量相结合方式进行扫描。大坝廊道1829m高程三维激光扫描均自左岸起始向右岸方向进行;现场测站布置间距4m(局部加密,如观测间内等),以滚动方式沿测线推进扫描。
3.3 三维激光扫描分析成果
大坝廊道三维激光扫描基准数据库以三维点云数据为基础,涵盖洞身整体三维坐标信息、激光影像图、裂缝发育情况等信息。
配准完成后的隧洞整体点云数据将统一到参考坐标系,隧洞点云将被赋予准确的三维坐标信息。根据点云数据可查询隧洞中任意点的三维坐标、任意两点间的距离等信息,可提取隧道任意间距的断面信息等。
3.3.1三维激光扫描实景点云成果图
通过三维激光扫描仪得到的洞壁外观表面具有三维坐标信息的点数据集合称为点云。经对各测站采集数据进行配准,点云去噪、“漏洞”缝合等处理后,最终得到大坝廊道全洞段三维点云数据。通过将点云与全景高分辨率彩色全景影像数据相融合,得到大坝廊道三维实景点云模型成果,如图4所示。
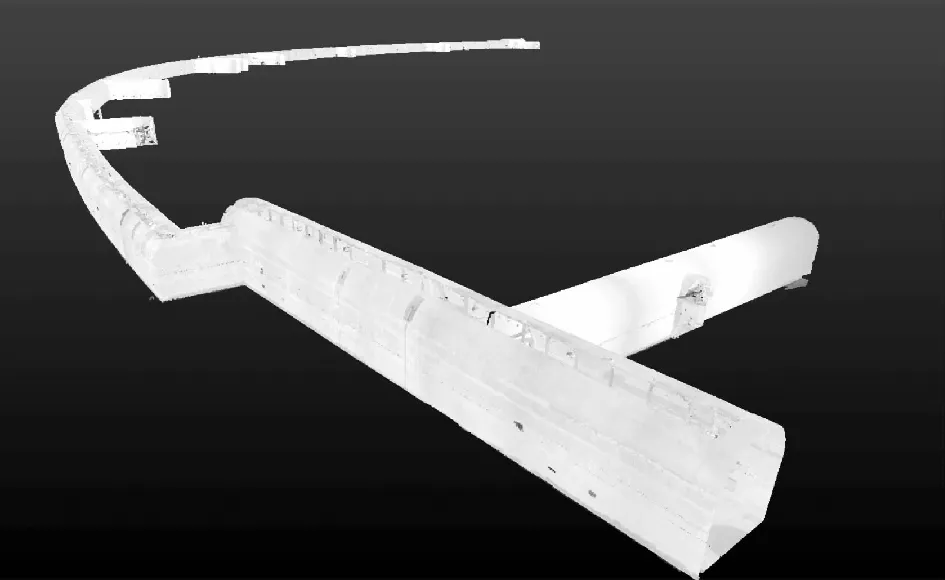
图4 1829m高程大坝廊道整体实景点云展示图
3.3.2三维激光扫描灰度点云成果图
以每测站三维激光扫描仪位置为球心,通过软件将该测站三维激光扫描所得的点云数据投影到一个球形的展开图中,并且将洞壁对激光的反射率以不同的灰度等级表示,即可生成该测站三维激光扫描的灰度全景图。混凝土表面当有裂缝、掉块、蜂窝麻面等缺陷时,会出现激光反射强度差异,缺陷将呈现区别于完整混凝土的表观特征。通过自动识别扫描数据中激光反射率强度特征和不同缺陷的表观特征,对洞壁混凝土裂缝进行自动提取,然后进行人工校核。
3.3.3形变位移量分析
三维激光扫描数据中每个三维点均有一个特定的坐标,从每个点的坐标计算可得点与点之间的距离,根据点云坐标可知大坝廊道内侧表面体型信息;此外,通过在远端山体内布置多个参考不动点,对在不同水位高度情况下采集大坝廊道点云数据进行分布校准,然后对同一桩号位置的洞壁点云数据进行精确匹配、对比分析、计算可获得大坝廊道在不同水位高程下各区域位移情况。通过解译不同高程廊道在不同水位情况下3D位移量成果,可分析大坝在三维空间中不同高程、不同区域受力形变情况及趋势。
为便于分析和直观了解拱坝形态,建立以拱坝中心线走向为参考坐标轴的三维空间坐标系统,该坐标系以高程方向为“Z轴”,以朝向高海拔方向为+、以朝向低海拔方向为-;以拱坝中心线为“Y轴”,以朝向下游方向为+、以朝向上游方向为-;以垂直拱坝中心线为“X轴”,以朝向左岸方向为+、以朝向右岸方向为-。三维激光扫描分析“坝拱中心线坐标系统”示意如图5所示。
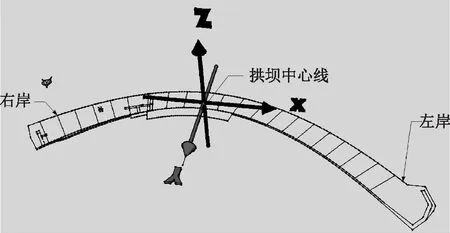
图5 三维激光扫描分析“坝拱中心线坐标系统”示意图
大坝1829m高程廊道内布置扫描测试控制点9个,该控制点同时采用三维激光扫描仪与全站仪进行扫描测试。此外,对整条廊道同步进行三维激光扫描测试,通过现场扫描和数据处理、分析,获得了大坝1829m高程廊道在不同水位下三维空间形态点云成果、以及其在不同水位情况下位移情况。
如图6所示,通过将大坝1829m高程PL05-2~PL19-2垂线观测系统观测数据投影到“坝拱中心线坐标系统”中,其位移量表现为:沿Y轴向位移量处于14~37mm之间;X轴向位移量处于-4~2mm之间,其中坝拱中心线至左岸坝基之间呈负值,坝拱中心线至右岸坝基之间呈正值。
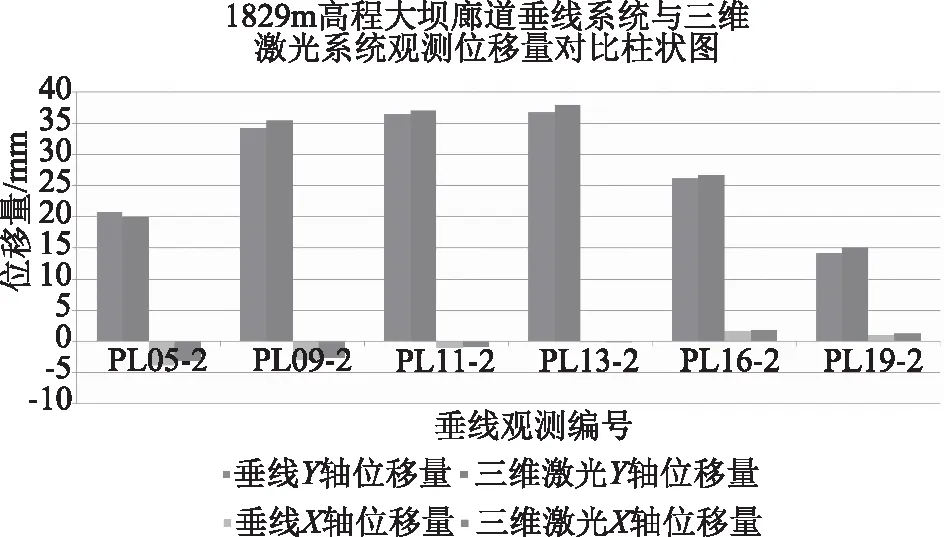
图6 1829m高程大坝廊道垂线系统与三维激光系统观测位移量对比柱状图
而通过对三维激光观测系统扫描所得PL05-2~PL19-2观测间点云成果进行位移分析,各观测间位移量表现为:沿Y轴向位移量处于15~38mm之间;X轴向位移量处于-4~2mm之间;其中坝拱中心线至左岸坝基之间呈负值,坝拱中心线至右岸坝基之间呈正值,与垂线观测系统整体趋势较一致。
4 结语
三维激光扫描技术已具有较高的测距精度和点云密度,运用在大坝形变监测中可以获得连续、完整、丰富的监测信息。同时,本文通过研发点云径向密度去噪法、高精度点云缝合技术、改进的高精度变形分析算法等,构建了基于三维点云场景的水电站大坝变形监测高精度数据处理方法,实现了大坝变形监测自动识别与智能分析,可以为水工建筑物全寿命周期的安全监测提供科学、有效支撑。
猜你喜欢
社会科学战线(2022年6期)2022-08-25
水电站机电技术(2022年4期)2022-04-18
资源导刊(2020年5期)2020-06-12
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2017年9期)2017-12-18
西部大开发(2017年7期)2017-06-26
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
中外医疗(2015年5期)2016-01-04