基于分数阶Tikhonov 正则化的激光吸收光谱燃烧场二维重建光路优化研究*
2023-02-19 08:09庞维煦李宁黄孝龙康杨李灿范旭东翁春生
物理学报 2023年3期
庞维煦 李宁 黄孝龙 康杨 李灿 范旭东 翁春生
(南京理工大学,瞬态物理国家重点实验室,南京 210094)
为探究基于激光吸收光谱技术的燃烧场二维测量光路布置方式,实现有限投影下更精确的燃烧场二维重建,根据分数阶微积分理论,提出一种基于分数阶Tikhonov 正则化的光路优化方法.将经典的整数阶Tikhonov 正则化推广到分数阶模式,建立了基于分数阶Tikhonov 正则化的光路设计目标函数.利用遗传算法分析(0,1)范围内不同阶数的计算结果,得到最佳光路布置方式.采用近红外波段7185.6 cm–1 的H2O 特征吸收谱线结合20 条测试光路对10×10 离散化网格区域进行计算,对比分析五种光路布置方式对多种分布模型的重建结果,结果表明,基于分数阶Tikhonov 正则化的光路布置方式具有最佳重建效果.研究结果对有限投影条件下激光吸收光谱二维测量光路的优化设计理论研究具有重要意义,可以促进激光吸收光谱技术在复杂发动机燃烧场二维重建及燃烧效率提升方面的应用.
1 引言
可调谐二极管激光吸收光谱技术(tunable diode laser absorption spectroscopy,TDLAS)作为一种非接触测量手段,它通过穿过待测介质的激光束实现对流场温度、组分浓度及速度等参数的在线监测,具有测量灵敏度高、抗噪声干扰能力强、流场适用性强等优点,在发动机性能测试中发挥重要作用[1−4].受该技术的视线特性以及燃烧场不均匀分布的限制,需要结合断层扫描技术对测量光路系统进行设计,实现对燃烧场组分浓度或温度的二维分布测量,从而使TDLAS 技术更加广泛应用在发动机燃烧诊断、工业过程控制、环境传感测量等领域[5−8].
测量空间有限导致待测区域离散化网格数量远远大于测量系统可布置的光路数量.只有很少一部分离散化网格内有光线通过.由于“无光路”网格数量较多,光路投影角度不完备,且各角度下光路投影数目较少,燃烧场的二维重建属于病态方程组求解问题.常采用迭代求解算法对该类问题进行迭代求解,如代数迭代算法、最大似然-期望最大化算法、最小二乘QR 分解算法等,或采用模拟退火算法、遗传算法、Levenburg-Maquardt 算法等搜索算法迭代搜索最优解.但是这两类算法往往因其局限性而不能得到很好的解,对后续重建工作带来较大误差.Tikhonov 正则化方法为此类问题的求解提供一个很好的思路,以适当正则化参数和正则化矩阵来控制方程解的平滑性,得到唯一正则解.Tikhonov 正则化策略可以得到较好的燃烧场参数分布情况,还可以结合截断奇异值分解算法进行数学分析,截去引起解不稳定的小奇异值,降低原方程组病态性,提高原方程组解的稳定性.
TDLAS 光路系统的优化是燃烧场二维重建的关键,研究人员从不同角度展开了深入研究.平行光路[9−16]、扇形光路[3,12,17,18]是常见的规则TDLAS光路布置方式,但这两类规则光路布置方式在有限的投影数量下对燃烧场的重建具有较大限制,无法保证重建精度.理论上,增加光路数量会提高燃烧场二维重建质量.但在实际测试中,光路数量往往受限于激光器数量及测试环境,从而影响规则TDLAS 光路布置方式的重建效果.
部分学者对不规则光路布置方式进行研究,进而提升有限投影数量下的激光吸收光谱二维重建能力.Terzija等[15]提出使用正弦图几何坐标对穿过发动机气缸的27 条不规则成像光路进行优化,尽管他们进行了定量重建实验,但文中对于该方法的数学理论分析提及较少.宋俊玲等[19]定义每个离散网格内穿过的光路数量为权值因子,以温度场重建结果均方误差作为光路分布的优化标准,并通过数值模拟验证了不规则光路布置方式的重建性能.Tsekenis等[20]寻找光路优化的“无观察者”特征,得到最小空间分辨率,为TDLAS 光路布置方式的优化提供了一个较好的思路.Yu等[21]以最小化矩阵向量正交度建立优化函数,不断减小投影光路相关性,使光路可以携带更多测量数据.根据宋俊玲等[22]提出的虚拟光线重建方法,那奕君等[23]采用不规则光路布置方式,以多角度再投影对病态方程组进行二次求解,提高了二维重建精度.Grauer等[24]基于Bayesian 原理提出估计后验协方差矩阵的光路优化方法,结合单一正则化参数的Tikhonov正则化推导出光路优化目标函数表达式,仿真结果表明该方法可以衡量二维重建误差.Twynstra 和Daun[25]依据Tikhonov 正则化理论,推导出基于单一正则化参数的光路设计函数.根据光路矩阵奇异值分布判断正则化参数的选取范围,并通过数值模拟验证了该方法的正确性.李宁等[26]提出基于Tikhonov 正则化参数矩阵的TDLAS 光路优化算法,理论推导出光路设计函数,采用遗传算法获得优化后的光路布置方式.该算法采用正则化参数矩阵调节正则解的平滑度,但在优化过程中还需要更加注意方程解的数据细节.
有限投影数据很难精确重建燃烧场,因此基于Tikhonov 正则化方法的光路系统在优化过程中更应关注方程组解的细节信息.本文提出一种基于分数阶Tikhonov 正则化的燃烧场二维重建光路设计方法,引入阶数改善了正则解过于平滑的缺点,在系数矩阵奇异值的保留上进行优化,进一步提高重建质量.理论推导出分数阶Tikhonov 正则化光路设计函数,通过遗传算法选择最佳阶数,得到最佳光路布置方式.通过对不同模型及不同光路对比分析,验证基于分数阶Tikhonov 正则化设计的光路布置方式的重建效果.该方法可为基于TDLAS技术的燃烧场重建光路设计提供一定理论求解思路,对复杂燃烧场二维重建具有重要的理论研究意义和工程应用前景.
2 TDLAS 光路设计方法
2.1 标准Tikhonov 正则化二维重建原理分析
可调谐激光器发射出波长为ν的激光穿过待测气体区域,激光能量被气体吸收并产生衰减效应,其规律满足Beer-Lambert 定律:

其中I0与It为激光穿过待测气体前后的强度;ν为波长;X为待测区域气体体积浓度;L为激光在均匀气体介质中的传播长度;P为待测区域气体总压力;α(ν)为气体吸收系数;φ(ν)为吸收谱线线型函数;S(T)为吸收谱线的线强函数,表示气体对光强吸收的强弱程度.图1 所示为TDLAS 测量及重建示意图.

图1 TDLAS 测量及重建示意图Fig.1.Schematic diagram of TDLAS measurement and reconstruction.
在不同角度及位置布置测试光路,可以得到大量投影数据,实现燃烧场的二维诊断.将待测区域离散化,得到n个网格.假定每个网格内部的气体温度均匀分布,通过叠加每个网格内部的气体吸收贡献值从而得到气体吸收系数.(1)式的离散化形式可以表示为

其中Aij为第i条光路在第j个网格内的光程长度;xj为第j个网格内的吸收系数;bi为第i条光路测量得到的投影值,为光谱系数累积值.对于含有m条光路的测试系统,燃烧场二维重建的关键是求解如下矩阵方程组:

其中A为m×n阶吸收系数矩阵,x为n×1 阶未知数向量,b为m×1 阶投影向量.实际的燃烧场二维重建因测量空间有限,光路数m远小于网格数n,因此TDLAS 二维重建属于病态方程组求解问题.
Tikhonov 正则化是求解病态方程组的有效办法之一,它通过增加约束条件使(3)式的解存在且唯一.此时将方程组求解问题转化为求最小值问题:

其中λ为正则化参数,用于控制残差范数与解向量范数的平衡;L为n×n阶正则化矩阵,常为单位阵或1 阶微分算子.考虑到燃烧场为连续分布,因此本文中正则化矩阵L采用微分算子形式:

其中k为与第i个网格相邻的网格数.
通过数学推导,(4)式的最小化问题等价于求如下正则化线性方程组的解:

因为方阵ATA为半正定矩阵,且正则化参数λ非零,(6)式的解可以表示为

2.2 基于分数阶Tikhonov 正则化的光路设计原理
对于标准Tikhonov 正则化,通常情况下其正则解xλ会表现的过于光滑,即解向量经去噪处理后丢失了许多含有较小奇异值的数据细节[27].针对这一不足,Hochstenbach 和Reichel[28]根据分数阶微积分理论思想,提出一种分数阶Tikhonov 正则化方法.本文将该方法应用于燃烧场二维重建光路设计,将(3)式转化为如下最小值问题:

其中参数α为分数阶次,选择合适的α值可以提高(8)式中解的质量.当α=1 时为标准Tikhonov正则化,此时W为单位阵.
通过数学推导,(8)式的分数阶Tikhonov 正则化最小值问题可以得到如下正态方程:

由于矩阵ATA为半正定矩阵,通过数学计算后,(10)式的正则解可以表示为

2.3 基于分数阶Tikhonov 正则化光路设计方法及求解
分析正则解xα与精确解x*之间的误差δx,进一步得到:

其中I为单位矩阵.可以看出,影响误差δx的直接因素是系数矩阵A、正则化参数λ及阶数α.通过合理设计光路结构与恰当选择参数,可有效地减小误差δx.为了进一步讨论光路结构与激光吸收光谱二维重建的关系,本文定义F为光路设计目标函数:

为了优化光路布置方式,需要对非线性方程(13)进行求解.遗传算法是基于生物进化理论的自主寻优算法,以目标函数值作为搜索信息,从具有多个个体的初始群体出发,有效地搜索非必要点,能够得到较为准确的全局解.(13)式中正则化参数λ与阶数α均为固定常数.所有参数选定并固定后,光路设计目标函数F的变化仅与系数矩阵A有关,而系数矩阵A是由光路布置方式所决定,因此非线性方程(13)的最优解对应最优的光路布置方式.本文采取遗传算法对方程(13)进行最优值求解.图2 所示为遗传算法求解最优值的流程框图.
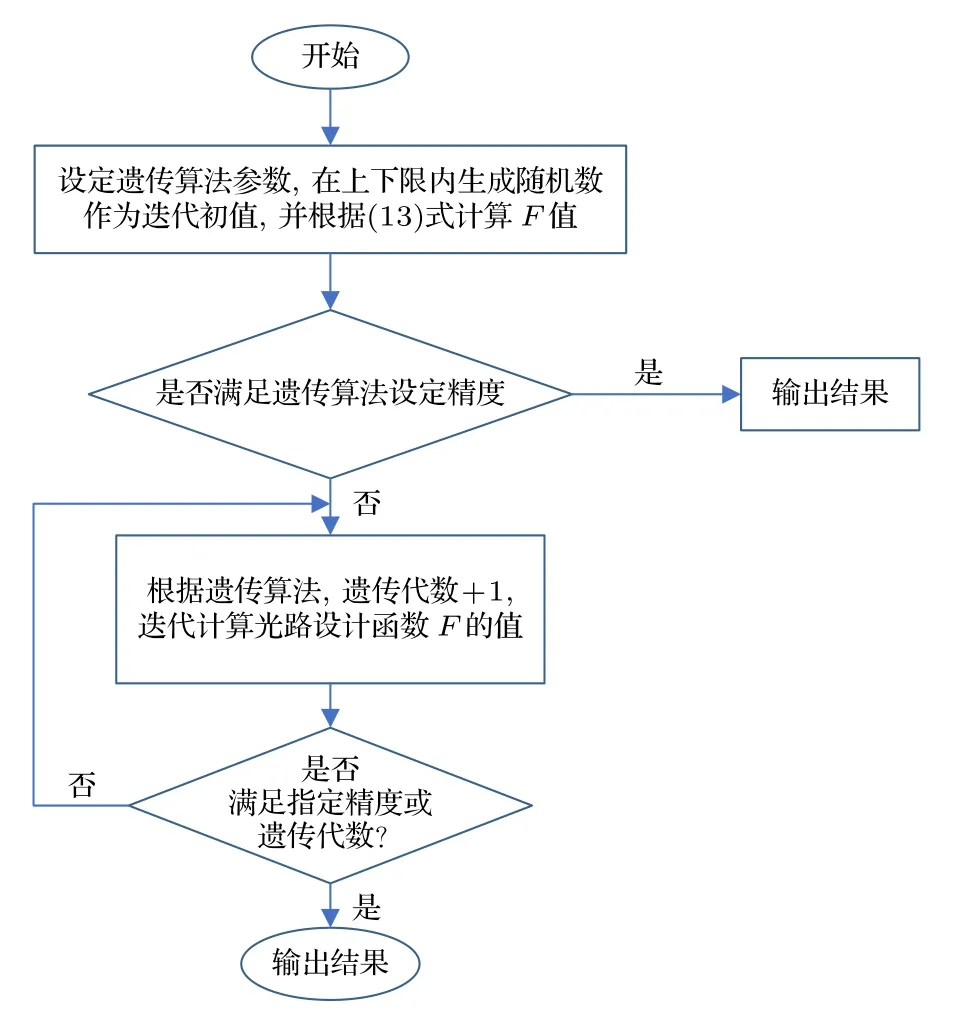
图2 遗传算法求解流程框图Fig.2.Flow chart of genetic algorithm.
本文采用遗传算法对20 条光路求解计算.将目标区域离散化为10×10 网格,以每条光路距离中心的距离及角度弧度值作为未知数,以上下限内的随机数作为初始种群,求解光路设计函数方程(13)每一代的最小值.遗传代数设定为2000 代,迭代完成后,输出最终的F值作为该光路设计函数的最优值进行保留.F值越小代表正则解越接近初始解,后续重建效果也更好.
2.4 阶数α 取值范围的选择
选定正则化参数矩阵L与正则化参数λ后,还需要确定阶数α的取值范围.
对投影矩阵A进行奇异值分解(SVD),可得

其中UA,VA为左右奇异向量列矩阵;ΣA为矩阵A的奇异值σi所组成的对角矩阵.将(14)式代入(10)式,可以得到分数阶Tikhonov 正则化解的表达形式为

其中(ui,b)表示向量ui与b的内积;ui,vi分别为正交阵UA,VA的列向量.
不同正则化方法有不同滤波函数,滤波函数的收敛情况与解向量的平滑程度紧密相关.定义分数阶Tikhonov 正则化方法的滤波函数为

分析上述滤波函数的渐近性,可以得到
其中O(·)表示高阶无穷小量.由(17)式可以看出,当矩阵A的奇异值逐渐趋于0 时,滤波函数φtikh,α(δi)也逐渐趋向于0,而φtikh,α(δi)收敛过快是解向量过于光滑的原因.图3 为奇异值在10–11至103时滤波函数随阶数α变化的曲线图.
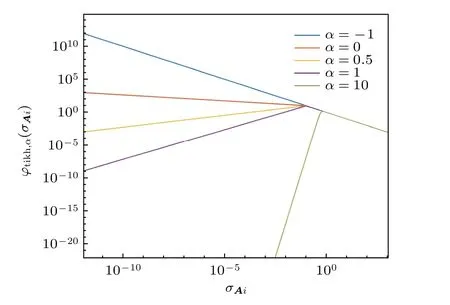
图3 滤波函数随阶数α 的变化Fig.3.Variation of filter function withα order.
由图3 可知,当α取值大于1 时,滤波函数收敛较快,使得方程组的解过于光滑,导致丢失了许多小奇异值关联的奇异向量,而这些向量反映的是重建数据的细节.当α取负数时,滤波函数在很大奇异值范围内单调递减,表明其去噪能力过弱,导致正则解收敛性较差或不收敛,对后续二维重建带来较大误差.由此说明阶数α的最佳取值范围为(0,1).从滤波函数的渐近性可以看出,相比于标准Tikhonov 正则化,分数阶Tikhonov 正则化收敛速度更慢,即较小奇异值对应的分量被有效保留下来.因此选择0<α<1,滤波函数可以提供更合适的平滑度,(10)式得到的解的质量会高于标准Tikhonov 正则化.综上所述,在(0,1)范围内选择合适的阶数α,可以有效地保留小奇异值对应的奇异向量,抑制较大奇异值对应的分量,提高解向量xα范数而逼近精确解,使方程组的解可以携带更多有效信息,重建结果更精确.
2.5 正则化参数λ 的选择
正则化参数λ的选择对燃烧场的二维重建效果具有重要影响.本文的正则化矩阵L非单位阵,因此不能通过L曲线法等方法确定λ的具体取值.
为了更准确地选取正则化参数λ,本文在不同阶数α取值时对光路设计函数(13)式进行遗传算法迭代分析,由迭代结果选取最佳的正则化参数λ.本文以10×10 离散化网格,20 条光路测试系统为研究对象,图4 为不同阶数下不同正则化参数的1000 代遗传算法求解结果.
从图4 可以看出,当阶数α取不同值时,正则化参数λ取1 或0.1 时可以带来更小的光路优化函数值.当正则化参数λ取102时,不同阶数下光路优化函数F的值均很大,且很快达到稳定状态,表明过大的正则化参数λ会使正则化的作用过于明显,正则解过于平滑.当正则化参数λ取较小的值时,正则解的平滑程度得到控制,但过小的正则化参数λ仍不能得到光路优化函数F的最小值,会带来较大的重建误差.综合考虑,正则化参数λ的最优取值范围为(0.1,1),因此本文后续的重建效果对比中,λ取0.5.
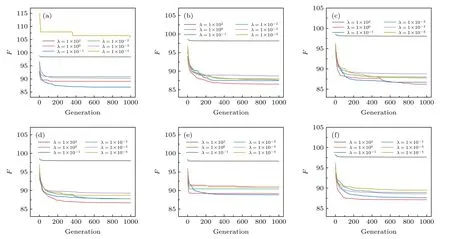
图4 不同阶数下正则化参数取值对遗传算法结果的影响(a)α=0.2;(b)α=0.4;(c)α=0.5;(d)α=0.6;(e)α=0.8;(f)α=1.0Fig.4.Influences of regularization parameters on the genetic algorithm results under different orders:(a)α=0.2;(b)α=0.4;(c)α=0.5;(d)α=0.6;(e)α=0.8;(f)α=1.0.
图5 所示为遗传算法对光路设计函数(13)式求解的最优值变化过程,以及对应的光路布置方式图像.
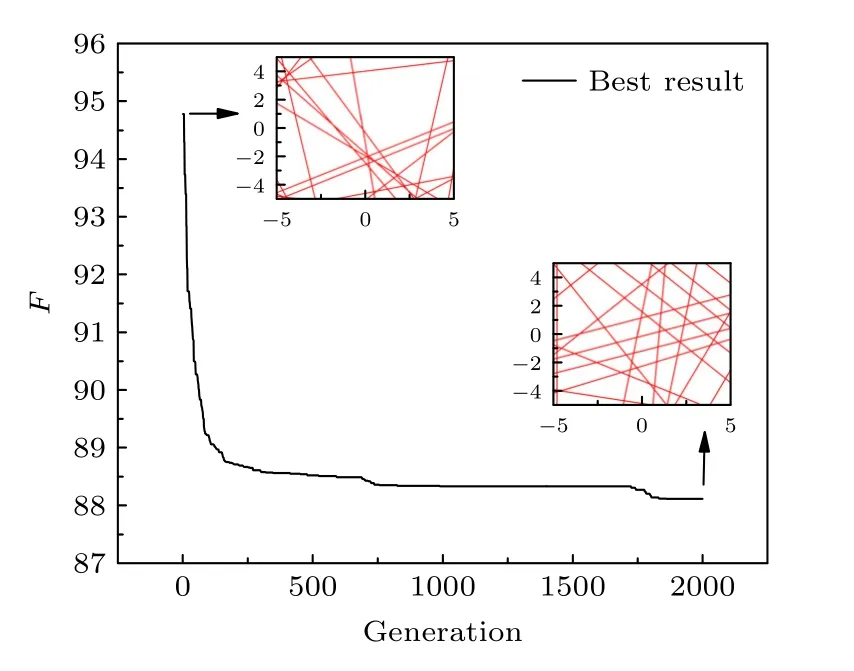
图5 光路优化函数的遗传算法求解Fig.5.Genetic algorithm solution for beam optimization function.
分数阶Tikhonov 正则化可以得到较好的光路布置方式,进而计算得到燃烧场的温度与浓度分布情况.本文的研究重点为利用分数阶Tikhonov 正则化方法得到有限投影下的光路系统,评估该光路系统的重建效果.为了更好地比较重建结果,以网格吸收系数为指标对重建图像质量进行对比分析.定义吸收系数平均相对误差ε,用来描述重建结果与初始模型之间对应网格内数据的平均差异:

式中,N为离散化网格数目,为模型吸收系数,为计算得到的吸收系数.误差ε值越小,表明重建图像与初始模型匹配度越高,重建质量越高.
3 TDLAS 二维重建仿真
3.1 分数阶α 的取值选择
分数阶Tikhonov 正则化方法的实质是:通过阶数控制投影方程计算精度,选择阶数α以提高方程组解xα范数,进一步逼近方程组的精确解,提高光路优化函数的求解精度.根据(13)式可知,系数矩阵A的奇异值会直接影响重建光路的布置方式,因此在(0,1)范围内选择合适的阶数,以该阶数对应光路为最优光路布置方式,进一步提升重建效果.
为了进一步分析阶数α的取值及作用,以20 条光路,10×10 离散化网格为例进行讨论.在(0,1)范围内选取五个α值,α=1.0 时为标准Tikhonov 正则化.图6 所示为光路优化函数的遗传算法求解.
由图6 可以明显地看出,当α=0.4 时,光路优化函数的遗传算法求解结果最小,此时最小的F值对应(10)式的最优解,也对应(8)式的最小值.因此,选择α=0.4 作为最佳阶数,可以更好地保留方程组精确解的有效信息,重建质量得到提升,同时选择该阶数对应的光路进行后续不同光路重建效果的对比分析.

图6 不同阶数取值下的光路优化函数求解Fig.6.Solution of beam optimization function under different order values.
3.2 分数阶α 取值的影响因素分析
研究不同网格尺寸对分数阶Tikhonov 正则化阶数取值的影响.系数矩阵A的奇异值会随着测量区域尺寸的增大而增大,正则化参数λ的值也应随之变化.以上文α=0.4 为最优阶数,保持该阶数固定不变,改变正则化参数λ的值,以改变正则项在(10)式中的比重,实现(13)式更精确的求解.
以1 m 网格为基准,当网格边长缩小至0.1 m时,正则化参数的最优取值区间由0.1 至1 缩小为0.01 至0.1.当网格边长扩大至10 m 时,正则化参数的最优取值区间扩大为1 至10.因此可以认为当网格尺寸发生变化时,只需将基准正则化参数λ与测量区域尺寸相乘,从而保证最终阶数的选择不变.在此基础上,光路设计函数(13)式可以等价为如下形式:

其中λα为固定常数,以1 m 测量区域尺寸的取值为标准;l为测量区域网格的边长.当λα固定时,阶数α的取值不会发生改变,当λα变化时,阶数α的取值会发生改变.
另外,测量区域的尺寸恒定时,加密网格或增加光路数量基本不会改变系数矩阵A的奇异值,正则化参数λ的取值不会随之发生变化,因此,不会影响阶数α的取值.
3.3 基于分数阶Tikhonov 正则化的光路设计与重建效果对比
根据分数阶微积分理论,利用分数阶Tikhonov正则化方法得到燃烧场重建的光路设计函数,结合遗传算法可以得到优化后的激光吸收光谱二维测量光路布置方式.为验证该光路布置方式的重建效果,分别与以下光路布置方式得到的重建结果进行对比:方式(a)2×10 正交光路布置方式;方式(b)4×5 扇形光路布置方式;方式(c)交叉光路布置方式;方式(d)基于标准Tikhonov 正则化设计的光路布置方式;方式(e)基于分数阶Tikhonov 正则化设计的光路布置方式.图7 所示为不同光路布置方式的分布情况及其极坐标投影点.
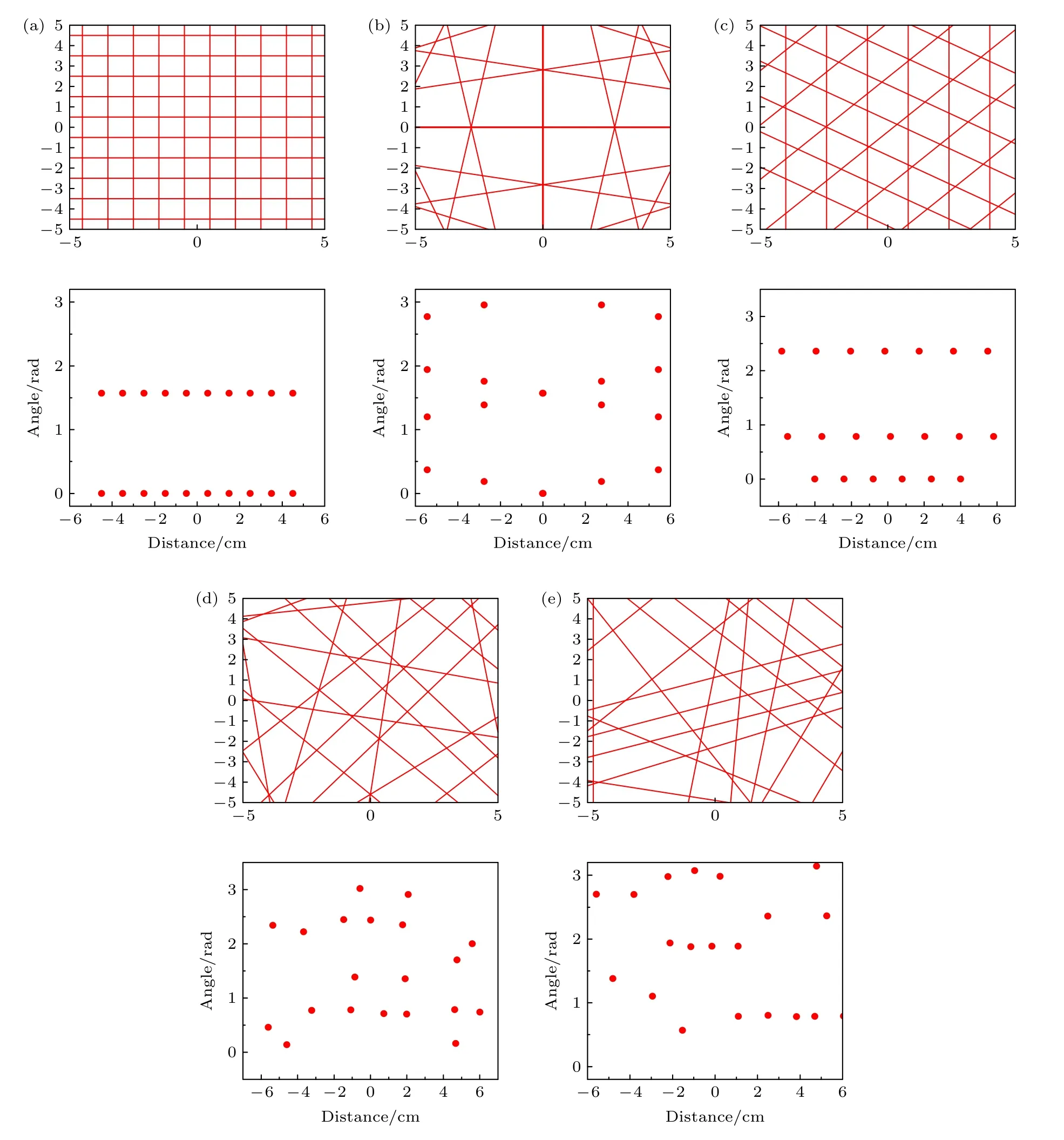
图7 五种光路布置方式的空间分布图与投影点分布图(a)2×10 正交光路布置方式;(b)4×5 扇形光路布置方式;(c)交叉光路布置方式;(d)基于标准Tikhonov 正则化设计的光路布置方式;(e)基于分数阶Tikhonov 正则化设计的光路布置方式Fig.7.Spatial distribution and projection point distribution diagram of five beam arrangements:(a)2×10 orthogonal optical path arrangement;(b)4×5 fan-shaped optical path arrangement;(c)cross optical path arrangement;(d)beam arrangement based on standard Tikhonov regularization design;(e)beam arrangement based on fractional Tikhonov regularization design.
选取不同高斯模型为研究对象,讨论不同光路布置方式在不同模型下的重建结果.将测量区域离散化为10×10 网格,选择燃烧场中的H2O为测量对象,选择其近红外波段7185.6 cm–1处的特征吸收谱线为测量谱线,重建模型分别采用单峰高斯分布模型与双峰高斯分布模型,光路数量均为20 条.为控制变量,图7 中的光路布置方式均使用相同正则化参数(λ=0.5)下的标准Tikhonov正则化方法,直接计算得到重建结果.图8 与图9为不同重建模型及不同光路布置方式下的重建结果图.

图8 单峰分布模型与不同光路布置方式的重建结果图(a)重建模型;(b)2×10 正交光路布置方式;(c)4×5 扇形光路布置方式;(d)交叉光路布置方式;(e)基于标准Tikhonov 正则化设计的光路布置方式;(f)基于分数阶Tikhonov 正则化设计的光路布置方式Fig.8.Reconstruction results of unimodal distribution model and different beam arrangements:(a)reconstruction model;(b)2×10 orthogonal beam arrangement;(c)4×5 fan-shaped beam arrangement;(d)cross beam arrangement(e)beam arrangement based on standard Tikhonov regularization design;(f)beam arrangement based on fractional Tikhonov regularization design.

图9 双峰分布模型与不同光路布置方式的重建结果图(a)重建模型;(b)2×10 正交光路布置方式;(c)4×5 扇形光路布置方式;(d)交叉光路布置方式;(e)基于标准Tikhonov 正则化设计的光路布置方式;(f)基于分数阶Tikhonov 正则化设计的光路布置方式Fig.9.Reconstruction results of bimodal distribution model and different beam arrangements:(a)Reconstruction model;(b)2×10 orthogonal beam arrangement;(c)4×5 fan-shaped beam arrangement;(d)cross beam arrangement;(e)beam arrangement based on standard Tikhonov regularization design;(f)beam arrangement based on fractional Tikhonov regularization design.
从图8 可以看出,对于单峰分布模型,不同光路布置方式得到的重建结果存在差异.光路布置方式(a)和方式(b)的重建结果相比其他方式的重建
结果较差,峰值位置与模型相同,但峰值大小存在明显偏差,重建误差分别为0.0974 和0.0633,且在吸收系数较小的区域重建误差更大,如图8(b)和图8(c)所示.光路布置方式(c)在光路布置方式(a)的基础上增加了投影角度,相比前两种方式,该方式的重建质量明显提升,误差为0.0503,但重建图像的峰值大小相比原模型依旧存在较大误差,如图8(d)所示.光路布置方式(d)和光路布置方式(e)得到的重建结果很好,重建结果的峰值位置和峰值大小均与原模型基本吻合,重建误差分别为0.0307 与0.0236,但是与重建模型相比,光路布置方式(d)和光路布置方式(e)得到的重建结果在模型边界处依然会有一些网格存在误差(图中黑色部分所示),如图8(e)和图8(f)所示.
从图9 可以看出,对于双峰分布模型,不同光路布置方式对应的重建结果具有较大差异.光路布置方式(a)的重建结果最差,峰值位置与峰值大小均与原模型有较大偏差,重建误差达到了0.0485,如图9(b)所示.方式(a)的正交光路虽然能够保证每个网格内部均有光线通过,但投影角度过少,相邻光线距离过近是其重建误差较大的原因.后四种光路布置方式均能够重建得到较准确的峰值位置.光路布置方式(b)的重建误差为0.0411,重建结果如图9(c)所示.扇形光路增加了投影角度,但相邻的光线会重复穿过同一个网格,因此重建误差也较大.对于光路布置方式(c)而言,该方式将方式(a)改为三角度投影,重建结果如图9(d)所示,重建误差为0.0387,可见重建质量相比于方式(a)有了较大提升,但重建峰值大小相比原模型依旧存在较大误差.这是由于方式(c)的投影角度增加,每个投影角度上的光线数量减少且相邻平行光线之间的距离增加.但该光路布置方式的光路利用率较低,因此需要选择利用率更高的光路布置方式来提高重建精度.
基于标准Tikhonov 正则化的光路布置方式(d)和基于分数阶Tikhonov 正则化的光路布置方式(e)对应的重建结果较好,重建得到的图像峰值位置与原模型较为吻合,峰值大小更接近原模型,二者的重建误差分别为0.0336 与0.0228,如图9(e)和图9(f)所示.相比之下,基于分数阶Tikhonov正则化的光路布置方式得到的重建效果更加理想.该方法在标准Tikhonov 正则化的基础上,在AAT的伪逆中引入阶数α可以有效地保留投影矩阵较小的奇异值,使计算得到的光路数据能够尽可能多地携带精确解的细节信息,从而降低正则解的平滑性,达到更好的重建效果.
以四峰高斯分布模型为例,验证基于分数阶Tikhonov 正则化设计的光路布置方式对复杂燃烧场的重建能力.分别采用上述五种光路布置方式对其进行重建,重建结果表明,基于分数阶Tikhonov正则化设计的光路布置方式的重建能力最好,重建误差为0.0415.虽然重建结果中有个别网格内的数据存在偏差,但重建结果依然能够较为准确地反映燃烧场模型中的峰值数量和峰值位置.因此在实际复杂燃烧场工况下,基于分数阶Tikhonov 正则化设计的光路布置方式依然可以提供有效的燃烧场重建结果,从而对燃烧状态进行诊断.
4 结论
实现不完备投影数据下燃烧场二维重建的关键是光路布置方式的优化.本文基于激光吸收光谱技术,采用分数阶Tikhonov 正则化方法对燃烧场投影病态方程组进行求解,获得最优光路布置方式.为解决采用标准Tikhonov 正则化方式得到的正则解过于光滑这一问题,提出了一种基于分数阶Tikhonov 正则化方法的光路优化思路,通过数学推导建立光路优化函数,采用遗传算法分析得到优化后的光路布置方式.分析了分数阶数的作用效果,表明分数阶Tikhonov 正则化方法可以通过选择合适的阶数来提高重建精度.利用基于分数阶Tikhonov 正则化方法的光路布置方式与其他光路布置方式分别对不同高斯分布模型进行重建效果对比,结果表明本文设计的光路布置方式的重建精度最高,能够达到更好地重建效果.研究结果对有限投影条件下的激光吸收光谱技术二维重建技术理论研究具有重要意义,为激光吸收光谱二维重建技术在燃烧诊断领域的实际化应用提供技术支撑.
猜你喜欢
怀化学院学报(2021年5期)2021-12-01
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
华东师范大学学报(自然科学版)(2021年3期)2021-06-03
陕西科技大学学报(2019年4期)2019-07-04
数学年刊A辑(中文版)(2019年1期)2019-01-31
教育教学论坛(2018年39期)2018-09-25
理科考试研究·初中(2017年5期)2018-03-07
中学生数理化·八年级物理人教版(2017年10期)2018-01-22
中国高新技术企业·综合版(2013年1期)2013-02-04