
同向航迹对ITP距离的影响分析
2023-04-13 11:39张光明
现代计算机 2023年3期
李 曦,张光明
(中国民用航空飞行学院飞行技术学院,广汉 618307)
0 引言
随着社会经济的不断发展,骨干航路航班流量不断增加,民航空域日趋紧张,提高空域使用效率容量是迫切需要解决的问题。在海洋或偏远地区等无雷达覆盖区域,传统航空器飞行高度层变更需要满足80~100 海里(Nautical Miles,NM)以上的纵向间隔,导致空域利用效率低下。基于ADS-B(Automatic Dependent Surveillance-Broadcast)IN 的ITP(In-Trail Procedure)程序,可以利用ADS-B的高精度监视信息将计划变更高度层的航空器纵向间隔减少至15~20 NM,从而大大提高空域容量和利用效率。
国际民航组织《空中交通管理》(ICAO 4444)中规定,ITP 距离必须大于15 NM,速度差必须小于20 节。对于ITP 监视应用技术的研究,早在2005 年,FAA 成立的监视和广播服务项目根据ADS-B 技术多年研发基础,提出了多种基于ADS-B IN 设备的应用,其中就包括ITP 应用[1]。2007 年,美国宇航局NASA 公布了ITP 应用功能算法流程,在没有异常飞行操作,不考虑设备故障、通信无中断的情况下,验证了ITP操作的航空器碰撞安全性[2-4]。2008 年,针对ITP 应用的可行性验证,NASA 下属研究机构兰利研究中心(Langley Research Center,La RC)进行了海洋环境下ITP 外场测试实验[5],验证了ITP 应用能够在海洋航路上有效地实现高度变更操作,并减少航空器之间纵向间隔。2019 年,Izadi 等[6]使用全球海洋模型(一种快速时间计算机模拟工具)研究了ITP 的作业运营效益。2021 年,美国联邦航空管理局(Federal Aviation Administration,FAA)统计了2011 年至2016 年南太平洋上空航路的平均ITP距离为29 NM[7]。
国内方面,2019 年王秋拾[8]计算了同一航迹下的纵向碰撞概率,验证了ITP 的安全性。2020 年,黄清[9]研究了航空器的真实距离模型,在此基础上建立了ITP操作时航空器的碰撞概率模型,验证了ITP 操作的安全性。2021 年,苏卓琳等[10]利用高度层变更算法对具备高度层变更能力的航空器进行预判,增强了地面监管人员的情景意识。
目前,国内外对ITP的研究主要集中在计算碰撞概率、验证其可行性以及能够减少燃油消耗上,对ITP距离的研究比较少,并且对其碰撞概率的计算是在航空器航迹之间的角度为零(即相同航迹)时纵向重叠概率的基础上,这是ITP运行碰撞风险的最坏情况,这是一个门限值,并未考虑航迹夹角对ITP距离的影响。
本文考虑航迹夹角等因素,研究同向航迹(Similar track)不同夹角时ITP 距离问题,建立了ITP 距离求解模型,得到了ITP 距离随航迹交叉角度和爬升率以及速度差变化的关系,并根据夹角的不同动态调整ITP距离,确保在安全的基础上提高空域的使用效率。
1 ITP运行规则分析
实施高度层变更的基本流程:第一步是确定参考航空器;第二步是判断是否能够满足高度层穿越的条件;第三步是向空管发出高度层穿越的请求;第四步是实施高度层的穿越动作[11]。
ITP 航空器(ITP traffic):完全有资格(从设备、操作员和飞行机组资格的角度)实施ITP 机动的航空器,且其飞行机组正在考虑改变飞行高度层。
参照航空器(reference traffic):一架或两架相同方向,具有合格的ADS-B数据,符合ITP速度/距离标准,且存在潜在冲突的航空器。
航空器在改变高度层时,具体情况如图1所示。

图1 6种典型ITP运行示意图
要执行ITP必须满足以下条件[11]:
(1)ITP距离>15 NM并且接近地速差<20节,或者ITP距离>20 NM并且接近地速差<30节。
(2)航迹夹角:ITP 航空器和参照航空器同向飞行,两架航空器之间夹角的绝对值小于45°。
(3)ITP 航空器爬升/下降能力:对执行ITP机动的航空器要求能够以300 ft/min 或以上的速度爬升/下降。
2 ITP距离模型建立
2.1 基本假设和变量定义
由于穿越高度层的情况很多,这里考虑航路结构比较复杂的情形,考虑两架航空器的运动情况。所以本文主要研究两架航空器交叉航迹上,ITP航空器向上爬升穿越高度层的情形。
为了安全,选择更加保守的运行方式,任何时刻两架航空器绝不可能同时出现在冲突区内,即两架航空器不会在同一时刻进入冲突区,顺序进出冲突区。
为了方便描述,运算所用到的运算符号如表1所示。
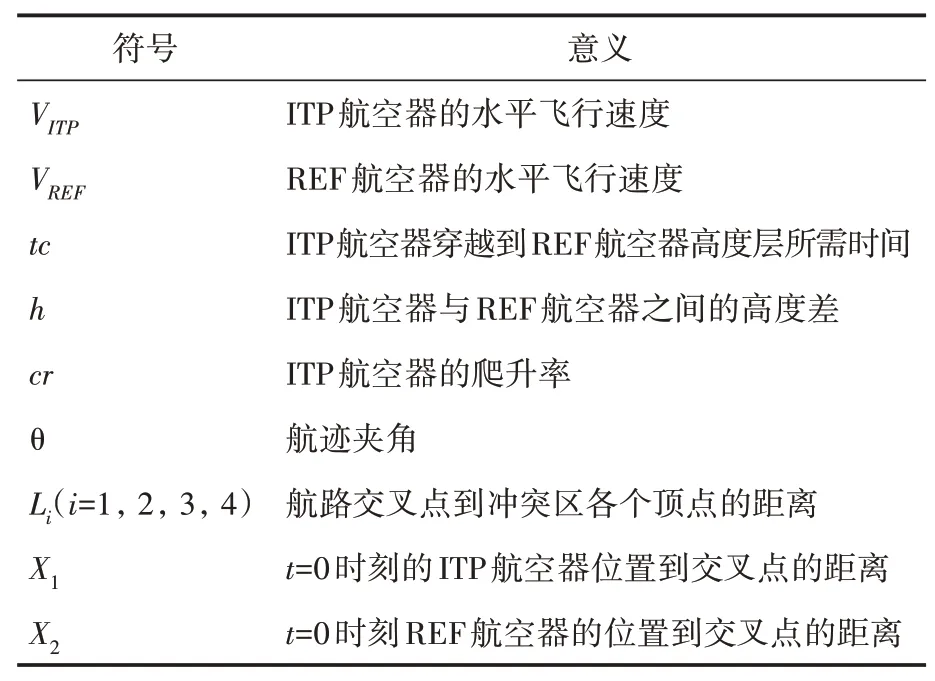
表1 运算符号说明
2.2 ITP距离和冲突区分析
目前对于ITP距离的研究都是基于同一航迹进行的,具有保守性,因此,本文研究同向航迹下的ITP距离,考虑到实际运行过程当中,航迹夹角对ITP 距离的影响。ITP 距离的示意图如图2所示。
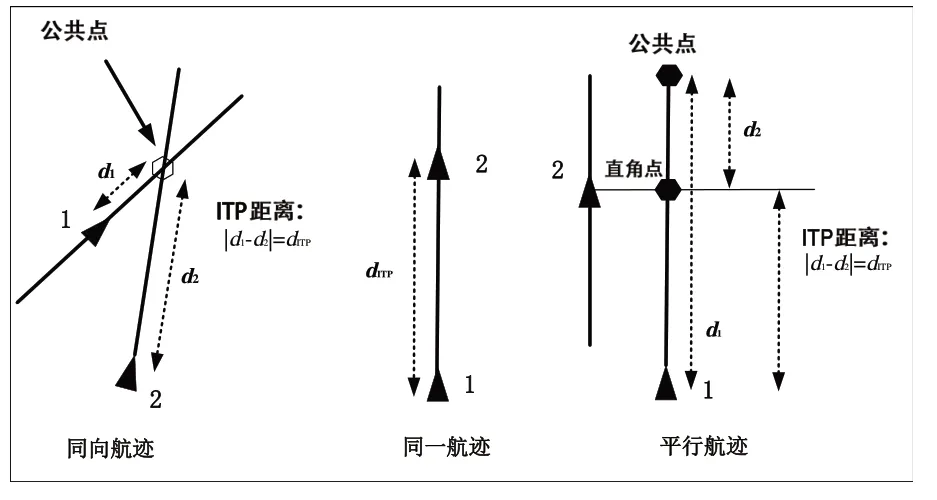
图2 ITP距离定义示意图
为了保证两架航空器在航路飞行时不发生碰撞,根据DOC 9689 文件[12]的附录1 引入冲突区概念,通过侧向间隔标准来确定侧向间隔点,再以航路交叉点到侧向间隔点的距离为半径画圆形成一个圆形保护区,所画的圆与两条交叉航路的交点确定的矩形即为冲突区域[13],只要任意时刻两架航空器不同时出现在冲突区内,即两架航空器不会在同一时刻进入冲突区,一前一后进出冲突区。
基本假设:
(1)假设航路飞行的两架航空器都是匀速飞行;
(2)假设两条航路相交于一点O,航向间的夹角为θ;
(3)假设ITP航空器在t= 0时刻开始变更高度层;
(4)航空器在航路上飞行的时候考虑位置误差,假设航空器的位置误差η满足正态分布,即η~N(0,σ2);
根据假设(4)可以进一步得到,两架航空器之间的侧向距离为Sy,当两机之间的间隔小于或者等于d0时,视为两架航空器发生碰撞,则满足关系式:
式(1)中,当碰撞概率等于安全目标水平(TLS)时,就可以得到航路飞行的侧向最小安全距离Sy。
具体的交叉航路的冲突区如图3所示,其中的Sy表示航路飞行时的侧向安全距离。冲突区建立在REF 航空器所在高度层的平面上,以航迹水平投影的交叉点为中心,建立矩形冲突区。
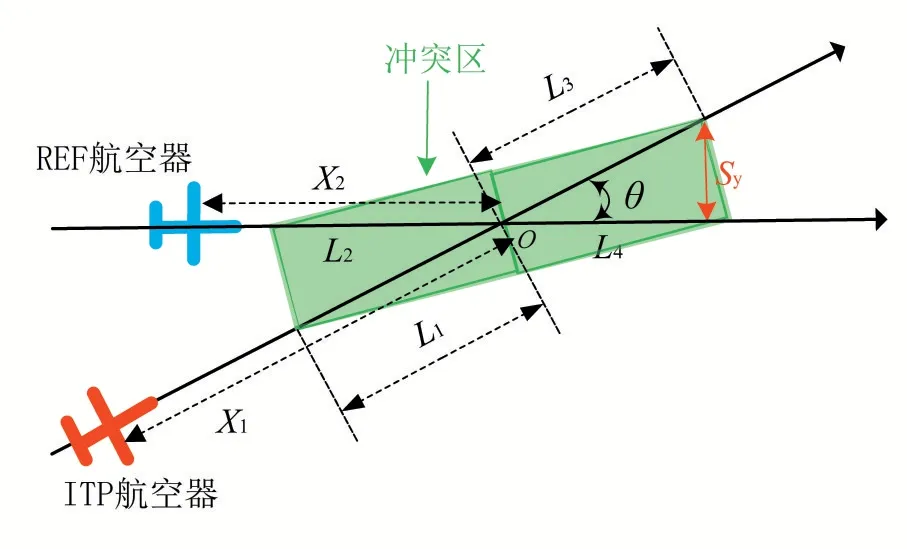
图3 航路飞行冲突区定义示意图
根据图3 可以得到冲突区的大小,计算如下:
当ITP 航空器向上爬升时,根据到达REF高度层所在位置以及REF 航空器的位置与冲突区的相对位置关系分为:航空器未进入冲突区、进入冲突区、脱离冲突区,可对如下几种情形进行分类讨论。
存在如下的情况:
(1)可能:表示ITP 航空器到达REF 航空器高度层时,两架航空器可能发生冲突;
(2)不可能:根据前面关于冲突区的假设,两架航空器不可能同时出现在冲突区域内;
(3)不考虑:表示此时有一架航空器已经离开了冲突区域,此时没有冲突风险,此类情况不予考虑。
表2汇总了两架航空器同时在冲突区高度层时相对位置关系,因此将可能的情形分为两类来进行分析研究:一是两架航空器均未进入冲突区;二是只有一架航空器进入了冲突区。
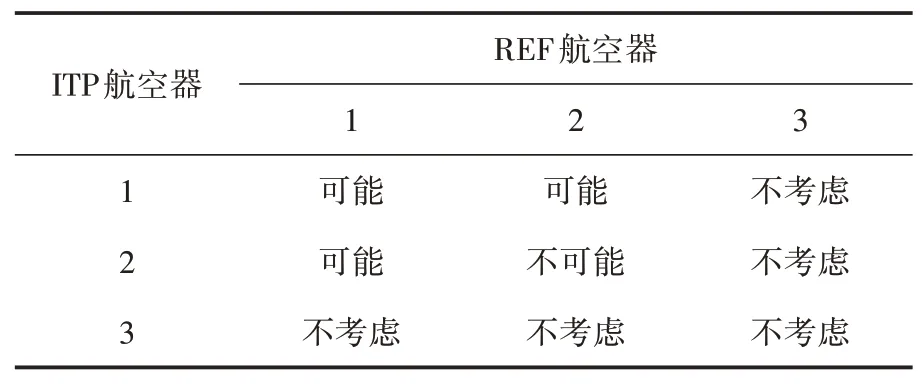
表2 航空器进入冲突区场景分析表
2.3 基于冲突区理论的ITP距离模型
航路飞行时,为了提高效率和安全性,期望两架航空器通过冲突区的时间越短越好,这里记两架航空器从实施ITP机动程序开始到各自离开冲突区的时间分别为T1和T2,则可以很容易得到目标函数。
当ITP 航空器到达REF 航空器的高度层时,为了更清楚地给出两架航空器的坐标位置,以交叉点为原点,REF航空器飞行的反方向为x轴的正方向,与x轴垂直方向为y轴,建立冲突区平面内的平面直角坐标系,如图4所示。
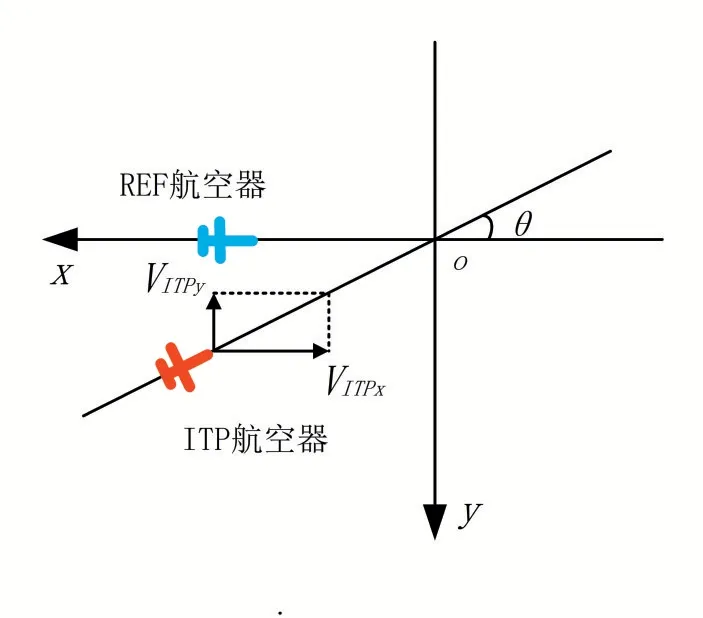
图4 冲突区水平分布示意图
将每架航空器的速度矢量分解,那么经过时间tc后,REF航空器的位置坐标为
ITP航空器的位置坐标为
两架航空器在航路上飞行时,彼此之间的水平间隔必须要大于最小侧向间隔,则:
情形一:两架航空器均未进入冲突区,即X1-L1>VITP·tc,且X2-L2>VREF·tc,如图5所示。
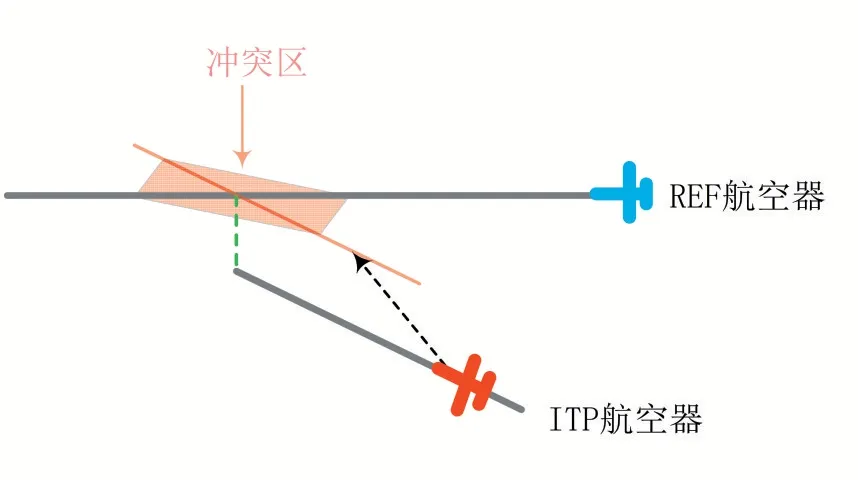
图5 ITP航空器高度层穿越未进入冲突区示意图
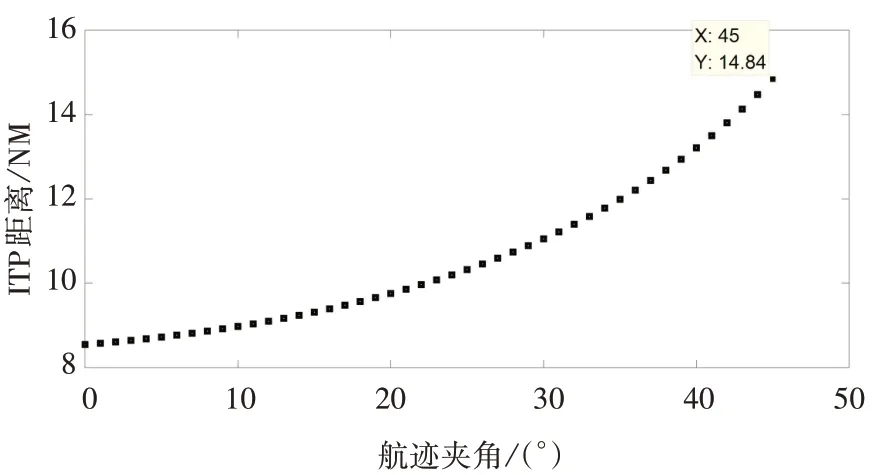
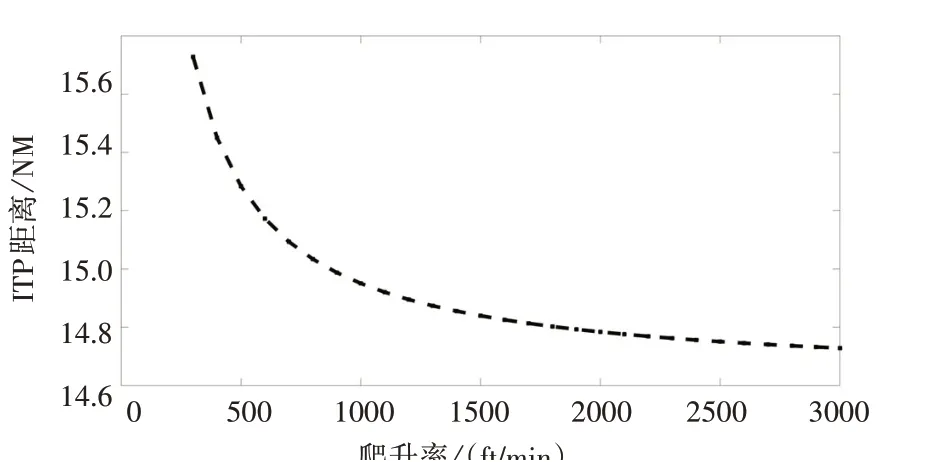
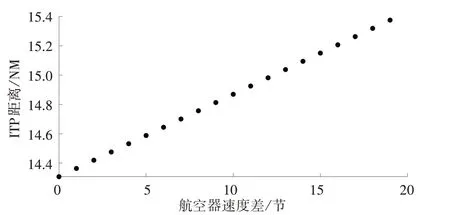
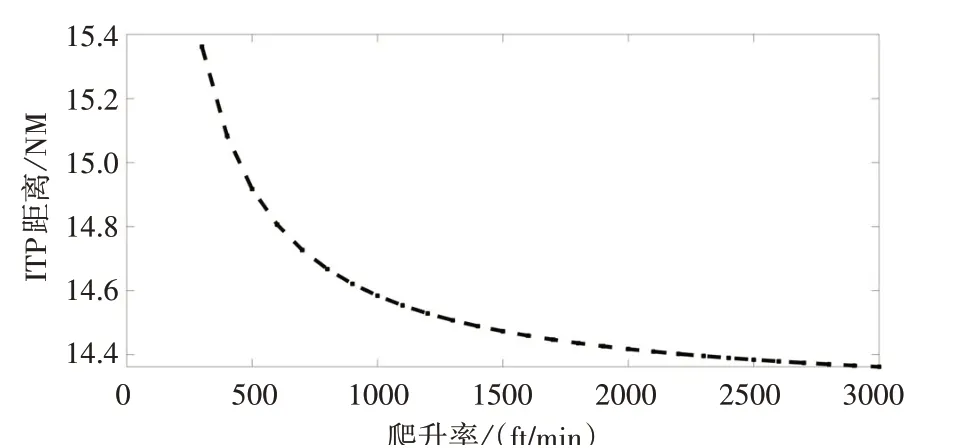
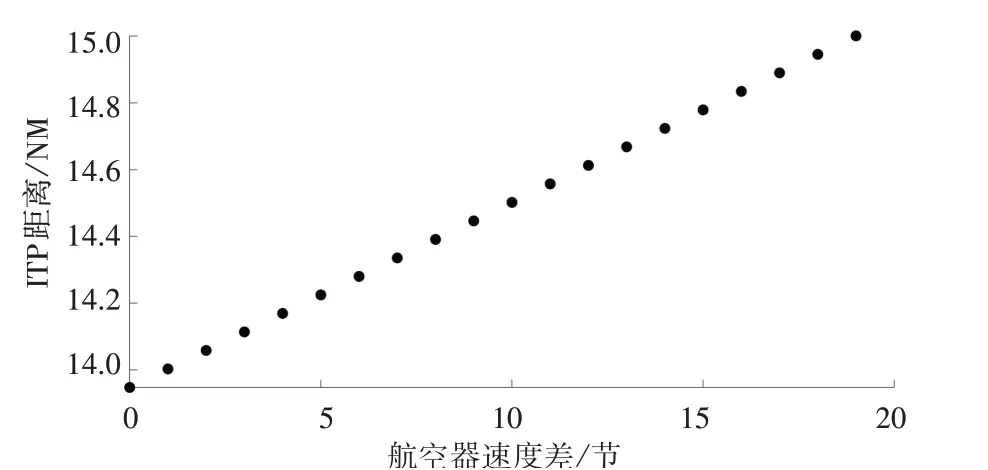
下面将以ITP航空器先进入冲突区为例进行分 析, 即 有tfei·VREF 就可以得到对应的求解模型。 情形二:两架航空器有一架进入了冲突区,另一架还未进入冲突区,这里以ITP航空器到达REF 航空器高度层时,处于冲突区内,且REF航空器还未进入冲突区为例,即X1+L3>VITP·tc>X1-L1且X2-L2>VREF·tc,如图6所示。 图6 ITP航空器高度层穿越进入冲突区示意图 当ITP 航空器处在REF 航空器所在高度层,并且处在冲突区内时,根据两架航空器不能同时出现在冲突区的原则,即可得到时间上的约束条件。 最后根据式(9)可以得到最后ITP 距离求解模型。 根据RTCA DO-312[11],航空器的位置满足均值为0,方差为0.255102 NM 的正态分布,1995 年ICAO 确定的航空器空中相撞的TLS 为1.5 × 10-8次事故/小时,侧向占5×10-9次事故/小时,根据式(1)可以得出,d0取0.0393 NM,Sy的大小为4 NM。 由于目前ITP程序在国内并未实施,所以相关参数借鉴了非ITP程序下的相关数据进行算例分析,使用MATLAB 中的fmincon 函数进行求解,高度层的高度差取2000 ft,爬升率取1500 ft/min。航段上ITP 航空器速度取460 节,参考航空器的速度取470 节,由于ITP 运行表示为两架航空器之间的航迹夹角在小于45°或者大于135°之间的飞行,因此此处考虑航迹夹角θ从0°变化到45°的情况,ITP 距离随航迹夹角的变化如图7所示。 图7 ITP距离随航迹夹角变化 由图7可以看到,在保证两架航空器不同时出现在冲突区域的情况下,两架航空器的ITP距离随着航迹夹角的增大是逐渐增加的。当航迹夹角为45°时,ITP距离为14.84 NM。 取航迹夹角为45°,高度层的高度差取2000 ft,爬升率在300~3000 ft/min 变化,航段上ITP 航空器速度取460 节,参考航空器的速度取470 节,得到ITP 距离随爬升率的变化,如图8所示。 图8 ITP距离随ITP航空器爬升率变化 由图8 可以看到,ITP 距离随着航空器爬升率的增大而减小,增长的速度在变小,当爬升率达到3000 ft/min时,ITP距离为14.73 NM。 取航迹夹角为45°,高度层的高度差取2000 ft,爬升率取1500 ft/min。得到ITP 距离随两架航空器的速度差的变化,如图9所示。 图9 ITP距离随两架航空器速度差变化 由图9 可以看到,两架航空器的速度差为0时,ITP 距离为14.31 NM,当ITP 航空器是领先航空器时,随着两架航空器之间相对速度的增加,ITP 距离也会增加,当速度差接近20 节时,最大ITP距离为15.38 NM。 高度层的高度差取2000 ft,爬升率取1500 ft/min。航段上ITP 航空器速度取460 节,参考航空器的速度取470 节,由于ITP 运行表示为两架航空器之间的航迹夹角在小于45°或者大于135°之间的飞行,因此此处考虑航迹夹角θ从0°变化到45°的情况,ITP 距离随航迹夹角的变化如图10所示。 图10 ITP距离随航迹夹角变化 由图10 可以看到,在保证两架航空器不同时出现在冲突区域的情况下,两架航空器之间的ITP 距离随着航迹夹角的增大是逐渐增大的。当航迹夹角为45°时,ITP距离为14.47 NM。 取航迹夹角为45°,高度层的高度差取2000 ft,爬升率在300~3000 ft/min 变化,航段上ITP 航空器速度取460 节,参考航空器的速度取470 节,得到ITP 距离随爬升率的变化,如图11所示。 图11 ITP距离随ITP航空器爬升率变化 由图11 可以看到,ITP 距离随着航空器的爬升率的增大而减小,增长的速度在变小,当爬升率达到3000 ft/min 时,此时的ITP 距离为14.36 NM。 取航迹夹角为45°,高度层的高度差取2000 ft,爬升率取1500 ft/min。得到ITP 距离随两架航空器的速度差的变化如图12所示。 图12 ITP距离随两架航空器速度差变化 由图12 可以看到,两架航空器的速度差为0 时,ITP 距离为13.95 NM,当ITP 航空器是领先航空器时,随着两架航空器之间相对速度的增加,ITP 距离也会增加,当速度差接近20 节时,最大ITP距离为14.99 NM。 在给定安全目标水平(TLS)的情况下,建立了航路上水平碰撞的风险模型,逆求出了两架航空器之间应该保持的最小侧向间隔,通过引入冲突区的概念,以两架航空器从实施ITP机动程序开始到各自离开冲突区的时间最短为目标,推导出不同航路交叉角和爬升率以及两架航空器之间的速度差对ITP距离的影响,结论如下: (1)ITP距离随着航迹夹角增大而增大,并且在45°时ITP距离最大,在情形一下为14.84 NM。 (2)在航迹夹角和航空器相对速度不变的情况下,ITP距离随着爬升率增大而减小。 (3)在航迹夹角和爬升率不变的情况下,ITP 航空器是领先航空器时,随着两架航空器之间相对速度的增加,ITP距离也会增加。 (4)本文的研究目的是缩小并动态调整ITP距离,在保证安全的前提下,充分利用空域,使得ITP距离最小。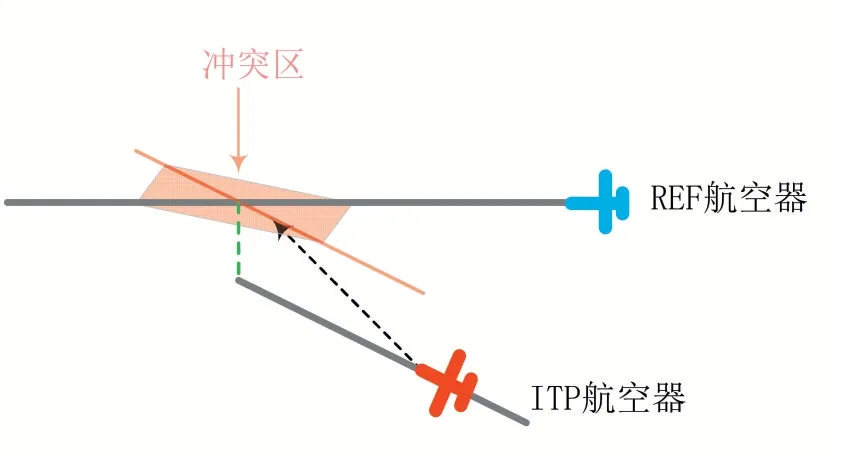
3 算例分析
3.1 两架航空器均未进入冲突区算例分析
3.2 两架航空器顺序进入冲突区算例分析

4 结语
猜你喜欢
重庆交通大学学报(自然科学版)(2018年8期)2018-07-30
西南石油大学学报(社会科学版)(2016年1期)2016-12-01
哈尔滨商业大学学报(自然科学版)(2016年4期)2016-09-02
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10
工业设计(2016年6期)2016-04-17
海军航空大学学报(2015年3期)2015-11-11
中学历史教学(2015年11期)2015-11-11
中国民航大学学报(2015年3期)2015-03-01
中国民航大学学报(2014年5期)2014-03-14
