
汽车非线性悬架系统的无模型自适应控制方法研究
2023-07-04 03:31王先明高远龙文李智健
广西科技大学学报 2023年2期
关键词:车辆
王先明 高远 龙文 李智健
摘 要:针对非线性悬架系统的控制问题,建立1/2车数学模型,提出一种双输入-双输出结构的改进型无模型自适应控制方法。该方法以车身的垂直振动加速度和俯仰角加速度为反馈量,以零加速度为控制期望,前后悬架的作动力为控制器输出。工作从双输入-双输出的紧格式动态线性化模型出发,引入一种加权改进的控制准则函数,推导出控制器数学表达式,并理论分析了悬架控制系统的稳定性。不同路面和车速的控制仿真对比结果表明,该方法相比传统的无模型自适应控制能进一步降低车身垂直振动加速度、动行程、轮胎形变,以及车身的俯仰角加速度,能更好地改善车辆的行驶平顺性和操纵稳定性。
关键词:车辆;非线性悬架系统;垂直振动;俯仰运动;无模型自适应控制
中图分类号:TP13;U463.33 DOI:10.16375/j.cnki.cn45-1395/t.2023.02.011
0 引言
基于电控技术的可控悬架系统是现代车辆底盘技术发展的一个重要趋势。控制策略是悬架控制系统研发的一个重要方面,也是实现车辆获得良好行驶平顺性和操纵稳定性的重要保证。真实的车辆悬架系统是受到路面不平度随机激励作用的非线性系统[1]。迄今,研究者提出了车辆悬架系统的诸多控制方法如文献[2-6]。这些方法大都基于1/4车的线性系统模型,不考虑空气弹簧等组成部件所具有的非线性特性对控制性能的影响,不能反映控制作用对车身俯仰或侧倾状态的影响变化[2-5]。近年来,有学者考虑悬架系统多变量耦合的复杂性,将车身纵向或/和横向运动的姿态变量(如俯仰、侧倾)纳入建模过程,建立较为精确的、高维的1/2车或整车模型;同時为了降低模型复杂度所带来的控制器设计困难,提出了不依赖模型的模糊控制、神经网络控制等智能控制方法[7-8],以及将传统LQR、PID等与模糊逻辑、神经计算相结合的复合控制方法[9-11]。这些研究虽在确保车辆获得良好行驶平顺性的同时,也能有效地保证车身行驶姿态的稳定性,但也存在模糊推理规则设计依赖专家经验,以及神经网络计算不能有效确保控制实时性等缺陷。
鉴于无模型自适应控制(model-free adaptive control, MFAC)设计不依赖系统数学模型,且具有控制参数可自适应调整、抗干扰能力强等特点[12],该控制理论方法受到了控制学界的研究关注,不仅在机电控制工程等领域获得了有效应用,而且在汽车四轮转向系统也有较好的控制效果[13-15]。本文为提高车辆行驶的乘坐舒适性和车身姿态的动力学稳定性,针对非线性悬架系统的控制问题,建立包含了车身俯仰状态变量在内的1/2车、四自由度非线性可控悬架系统数学模型;以零加速度值为控制期望,将反馈的车身垂直振动加速度和俯仰角加速度作为检测反馈量,提出一种改进型无模型自适应控制(improved model-free adaptive control, IMFAC)方法。该控制方法对传统的MFAC方案中的控制输入准则函数的控制误差及其变化律进行加权,以确保悬架控制器作为动力输出满足控制稳定性和快速性两者需求。通过推导设计出IMFAC控制器的数学表达式,证明控制误差系统的收敛稳定性。非线性悬架系统的控制仿真对比结果验证了所提控制方法的有效性和先进性。
1 建立非线性悬架系统的数学模型
图1为1/2车悬架系统四自由度主动悬架模型图。图中:zs、α分别表示车身质心处的垂直振动位移和俯仰角;ms和I分别为半车的质量和转动惯量;df 、dr分别是前、后轴到车身质心处的距离;mwf 、mwr分别是前、后轮的非簧载质量;kwf 、kwr则分别代表前、后轮胎的刚度;z0f 、z0r为前、后轮胎所受到的不平度路面激励;ksf 、ksr与csf 、csr分别表示前、后悬架的非线性弹簧刚度系数与阻尼系数;uf 、ur为前、后悬架的主动控制作动力;zsf 、zsr与zwf 、zwr分别表示前、后车身与前、后轮胎的垂向运动位移。假设非线性弹簧所产生的非线性恢复力与位移的关系为[16]:
[Fsf=ksf zwf-zsf+εfksf zwf-zsf3,Fsr=ksr zwr-zsr+εrksrzwr-zsr3. ] (1)
式中:Fsf与Fsr分别表示前、后悬架弹簧所产生的非线性恢复力;εf 、εr则是前、后悬架弹簧的非线性系数,且满足关系[0<εf<1],[0<εr<1]。
结合图1模型,并根据汽车动力学相关知识,可建立四自由度、1/2车运动方程模型:
[zwf=kwf z0f-zwf-csfzwf-zsf-Fsf+uf/mwf,zwr=kwr z0r-zwr-csrzwr-zsr-Fsr+ur/mwr,zs=csf zwf-zsf+Fsf+csrzwr-zsr+Fsr-uf-ur/ms,α=drcsrzwr-zsr+Fsr-ur-dfcsfzwf-zsf+Fsf-uf/I.]
(2)
当车辆俯仰角[α]的变化范围较小时,有关系[sinα≈α],故前、后车身位移可近似为:
[zsf=zs-dfα,zsr=zs+drα.] (3)
为实现通过前、后悬架主动力[uf] 、ur的控制作用来有效抵消或抑制因路面不平度所导致的车身垂向振动影响,同时保证汽车获得良好的纵向动态平衡性,设计恰当的悬架系统控制策略方法是关键。
2 改进型无模型自适应控制器设计
由于车身的垂直振动加速度[zs]、俯仰运动角加速度[α]均是反映车辆行驶平顺性的重要性能指标,均可通过加速度传感器测量获得。定义系统的输出矢量[y=zs,αT]、控制矢量[u=(uf ,ur)T]。本文的无模型自适应控制方案采用双输入-双输出的控制框架,以零加速度输出矢量[yd=zsd,αdT=0,0T]作为控制期望,通过设计获得改进型无模型自适应控制器规律,使其产生控制作用[u],确保车辆悬架系统可获得良好的行驶平顺性和安全稳定性。
2.1 四自由度悬架系统的动态线性化过程
按照MFAC的相关理论,将车辆悬架系统模型考虑成如下非线性离散时间系统[17]:
[y(k+1)=fu(k),u(k-1),…,u(k-nu), y(k), y(k-1),…, y(k-ny)]. (4)
式中:[u(k)∈R2×1]为[k]时刻系统的输入控制矢量;[y(k)∈R2×1]为[k]时刻的系统输出矢量;nu、[ny]为2个未知正整数;[f(k)∈R2×1]为未知的非线性函数向量。
在非线性悬架系统的控制中,系统的输入、輸出应均为有界,且能满足车辆平顺性与稳定性的要求。针对这些条件引入如下假设。
假设1 控制函数[f(·)]关于控制输入[u(k)]的偏导数是连续的。
假设2 该系统满足广义李普希茨连续条件,即对任意的[k]和[Δu(k)≠0],存在如下公式:
[Δy(k+1)≤ξΔu(k)]. (5)
式中:[Δy(k+1)=y(k+1)-y(k)],[Δu(k)=u(k)-u(k-1)],且[ξ]是一个正常数。
引理1 当离散时间系统满足假设1与假设2时,可将式(4)转化为紧格式动态线性化的数学模型:
[Δy(k+1)=φ(k)?Δu(k)]. (6)
式中:[φ(k)]表示伪雅可比矩阵。在四自由度主动悬架系统中,[φ(k)=φ11φ21φ12φ22∈R2×2],且对任意时刻[k],[φ(k)]是有界的。
为使被控悬架系统满足稳定性要求,可进一步引入如下假设。
假设3 系统的伪雅可比矩阵[φ(k)]满足对角占优矩阵,即:
[φij(k)i≠j≤ξ1, ξ2≤φij(k)i=j≤cξ2.] (7)
式中:i=1, 2;j=1, 2;[ξ2≥ξ1(2c+1)],[ξ1]、[ξ2]表示2个大于0的常数;[c≥1]。
2.2 基于改进型控制输入准则函数的控制算法设计
鉴于随机的路面不平度是影响车辆悬架系统控制性能的一个重要因素,特别是车辆通过具有冲激特性的路面时,瞬间过大的控制误差会使得系统可能发生失稳现象。为应对路面不平度对控制稳定性和响应快速性的不良影响,确保控制系统满足车辆行驶平顺性和动态稳定性要求,本文利用对输出误差及其误差变化率进行加权的思想[18],定义一种改进型的控制作用准则函数:
[J2(k)=θe(k+1)2+(1-θ)e(k+1)-e(k)T2+ λu(k)-u(k-1)2]. (8)
式中:[e(k)=yd(k)-y(k)=-y(k)]为输出误差矢量;[T]为采样周期;[λ]为大于0的系数;[θ]∈(0,1]为误差项的加权,当[θ=1]时,式(8)则退变为传统MFAC方法所用的准则函数形式。IMFAC方法是根据[e(k)]情况设计IMFAC算法,使算法输出合适的控制作动力[u],以使得系统输出[y]快速趋近输出期望[yd]。将式(6)代入式(8),根据准则函数极小原则对[u(k)]进行极值运算得到:
[Δu(k)=ρθ+1-θT2φT(k)e(k)-ρ1-θT2φT(k)e(k)λ+φ(k)2+φ(k)21-θT2].
(9)
式中:[ρ]∈(0,1]是步长因子。鉴于式(4)的非线性函数未能确知,式(9)中的伪雅可比矩阵无法基于系统数学模型得出,因此,引入权重因子[ζ>0],构建如下形式的估计准则函数:
[Jφ(k)=Δy(k+1)-φ(k)Δu(k+1)2+ ζφ(k)-φ(k-1)2]. (10)
采用最小参数估计准则函数对式(10)进行极值运算,可获得[φ(k)]的估计算法:
[φ(k)=η(Δy(k+1)-φ(k-1)Δu(k-1))?ΔuT(k-1)ζ+Δu(k)2+ φ(k-1)]. (11)
式中:[η]∈(0,2]是步长因子。为确保[φ(k)]在合理的范围内变化,可引入一种重置机制,即当[φ(k)≤ε]或[sgn(φ(k))≠sgn(φ(1))]时,有[φ(k)=φ(1)],其中[ε]是趋于0的正数。通过[φ(k)]估计,改进型无模型自适应控制器的表达式(9)变为:
[Δu(k)=ρθ+1-θT2φT(k)e(k)-ρ1-θT2φT(k)e(k)λ+φ(k)2+φ(k)21-θT2].
(12)
2.3 控制系统的稳定性分析
定义伪雅可比矩阵的估计误差矩阵[φ(k)=φ(k)-φ(k)],由式(11)可得:
[φ(k)=φ(k-1)+φ(k-1)-φ(k)- ηφ(k-1)Δu(k-1)?ΔuT(k-1)ζ+Δu(k)2]. (13)
由引理1可知[φ(k)≤ξ],故有关系[φ(k-1)-φ(k)≤2ξ]。令[z=ηΔu(k-1)2ζ+Δu(k-1)2],由于[η]∈(0,2]且[ζ>0],则[z]满足如下关系:
[0≤z<2]. (14)
对式(13)两边取范数,结合[z]的定义式可得到如下的数学关系:
[0≤φ(k)≤2ξ+φ(k-1)-]
[ηφ(k-1)Δu(k-1)?ΔuT(k-1)ζ+Δu(k-1)2=]
[2ξ+(1-z)][φ(k-1)]. (15)
由于[ξ>0],若要等式成立,即[limk→∞φ(k)→0],则式(14)中[z]的边界范围可进一步约束为1≤[z]<2,此时[(1-z)]∈([-]1,0],可使得:
[φ(k)=2ξ+(1-z)φ(k-1)≤ 1-(1-z)k-11-(1-z)2ξ+(1-z)k-1φ(1)]. (16)
由式(16)可知[φ(k)]有界,這表明对伪雅可比矩阵的估计[φ(k)]也是有界的。令[l1=θ+1-θT2, l2=1-θT2],则式(12)可整理成:
[Δu(k)=ρl1φT(k)e(k)-ρl2φT(k)e(k)λ+φ(k)2+l2φ(k)2]. (17)
考虑理想输出[yd(k+1)=yd(k)=(0,0)T]所具有的稳态特性关系,联立式(6)与式(17)可得:
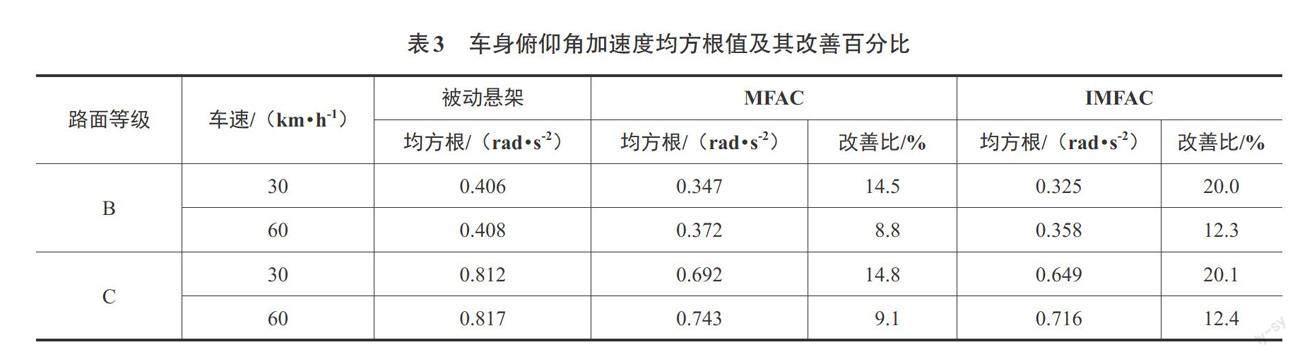
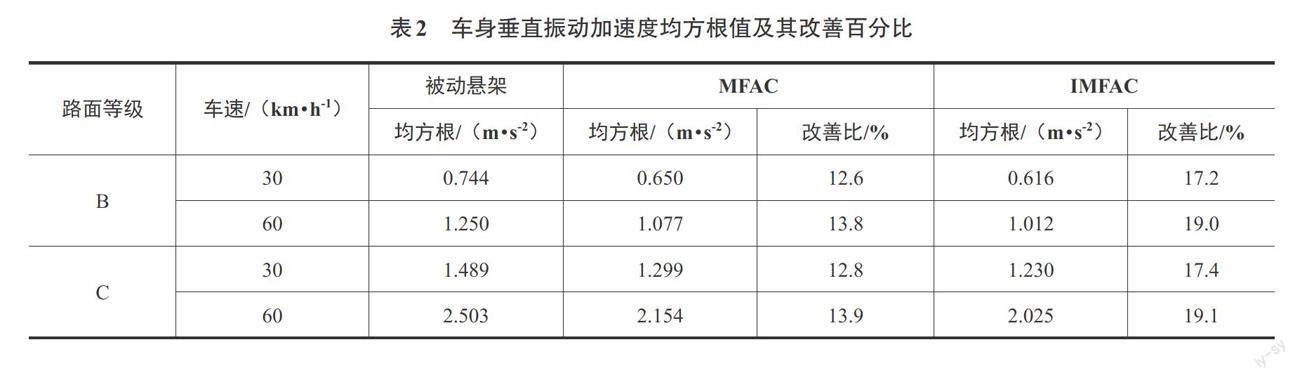
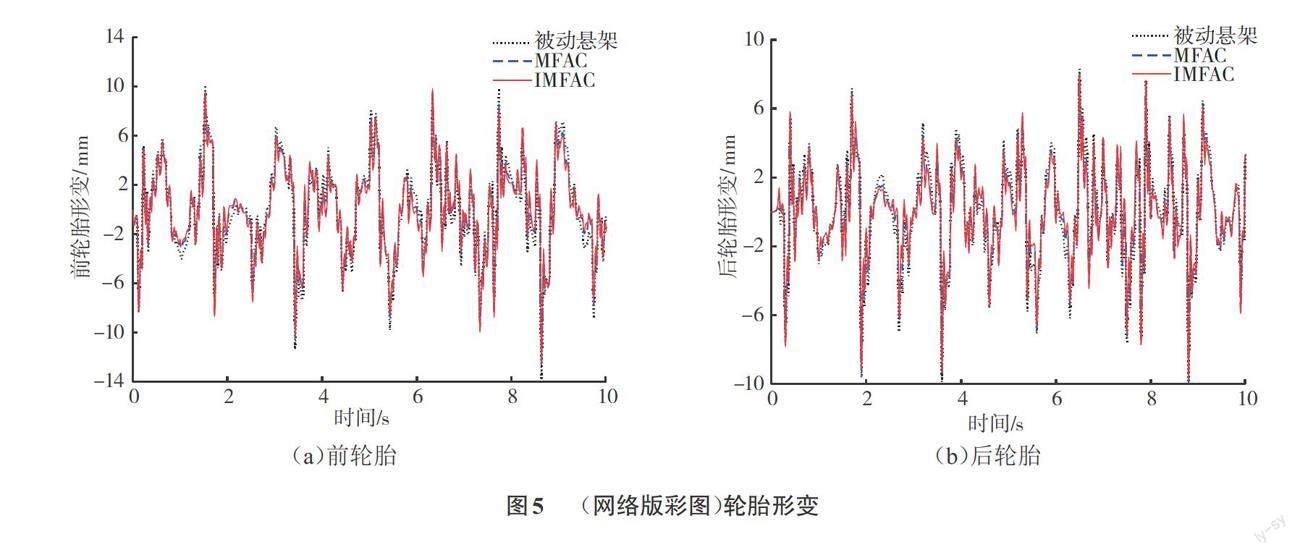
[Δy(k+1)=y(k+1)-y(k)=e(k)-e(k+1)= ρφ(k)φT(k)(l1-l2)λ+φ(k)2+l2φ(k)2e(k)]. (18)
令[M(k)=φ(k)φT(k)],由于[ρ∈(0,1]],[λ>0],[l1>l2],[0 [1-ρ(l1-l2)Mij(k)λ+φ(k)2+l2φ(k)2∈0,1,i=j=1,2,0-ρ(l1-l2)Mij(k)λ+φ(k)2+l2φ(k)2∈0,1,i≠j=1,2.] (19) 由式(18)、式(19)可得: [e(k+1)e(k)≤I-ρ(l1-l2)φ(k)φT(k)λ+φ(k)2+l2φ(k)2<1.] (20) 根据式(20)可知,非线性悬架系统在估计算法(11)和控制律(12)的作用下,通过对[φ(k)]的有界估计,使得控制误差向量满足[limk→∞e(k)=0]。 3 路面模型及结果分析 3.1 路面输入模型与仿真参数设置 基于MATLAB/Simulink环境搭建四自由度、1/2车非线性悬架系统仿真模型,将伪雅可比矩阵估计式(11)、控制器数学表达式(12)和路面不平度激励模型程序模块化实现。其中路面不平度模型采用如下的滤波白噪声时域模型[19]: [z0(t)=-2πf0?z0(t)+2πG0v?ω(t)]. (21) 式中:[z0(t)]表示路面不平度位移;[ω(t)]为高斯白噪声;[f0=0.1 Hz]是下截止频率;[v]表示直行车速;[G0]为路面不平度系数,当其取值64和256时分别对应B级路面和C级路面情况。 对控制系统仿真模型设置如表1所列的主动悬架系统参数,选取控制器参数[ρ=1、][ζ=3、][η=0.01、λ=30、θ=0.9、ε=10-5、φ1=21.93.1-5]。为验证本文方法的有效性,仿真中还对比了无控制的被动悬架系统和[θ=1]时的传统MFAC方法的相关结果。 3.2 控制仿真结果及分析 当车辆以60 km/h在B级路面行驶时,图2、图3分别为车身垂直振动加速度[zs]和俯仰角加速度[α]的响应情况。图4为动行程曲线图。图4(a)、(b)分别是前悬架动行程[zsf-zwf]和后悬架动行程[zsr-zwr]随时间的变化曲线图。图5(a)、(b)分别为前轮胎形变[zwf-z0f]和后轮胎形变[zwr -z0r]的变化曲线。表2—表5分别为在不同等级路面和车速行驶工况下,车身振动加速度、车身俯仰角加速度、悬架动行程和轮胎形变的均方根值,以及同时给出相比被动悬架情形,不同控制方法改善对应指标的百分比。由上述的控制仿真结果图、表可见,相比传统无控制的被动悬架系统,在不同车速和路面的行驶工况条件下,2种MFAC方法均能对车身的垂直加速度、俯仰角加速度、悬架动行程和轮胎形变有不同程度的改善,反映出2种控制方案都能有效降低随机不平度路面激励对车辆乘坐舒适性、车身动态稳定性的不良影响,同时有效避免了悬架动行程冲撞限位器和轮胎形变压力损害道路的发生。此外,相比传统MFAC方法,本文所提出的IMFAC方法在各种行驶工况下均能进一步降低车身垂向振动及车身俯仰角加速度、悬架动行程和轮胎形变,这也表明基于加权改进的控制准则函数所设计的IMFAC控制器可进一步提高车辆的行驶平顺性和操纵稳定性。 4 结论 为满足悬架系统控制性能对平稳性和快速性的要求,本文提出的改进型无模型自适应控制方法通过加权改进控制准则函数,并基于加权的控制准则函数设计出伪雅可比矩阵和二输入-二输出控制器数学表达式。仿真结果表明,相比传统的MFAC方法,本文方法不仅能克服多自由度非线性可控悬架系统模型所带来的控制器设计困难,而且能进一步降低车身垂向振动加速度、俯仰角加速度、悬架动行程和轮胎形变,确保悬架系统控制性能满足不同车速和不同等级路面的行驶工况要求,使得车辆获得更好的行驶平顺性和操纵稳定性。本文所用到的反馈变量均可采用相关传感器测量获得,同时目前高速微处理器的开发技术也较为成熟,方法具有工程试验可行性。研究结果为探索可控悬架系统的控制策略,提高汽车的行驶性能,提供了新的、有效可行的方法参考。 参考文献 [1] 周长城.汽车平顺性与悬架系统设计[M]. 北京:机械工业出版社,2011. [2] AHMED A A,JOMAH O S M.Modeling and control of car active suspension system using a neural network-based controller and linear quadratic regulator controller[C]//2020 IEEE 2nd International Conference on Electronics,Control,Optimization and Computer Science. Piscataway:IEEE,2020:1-6. [3] VIDYA V,DHARMANA M M.Model reference based intelligent control of an active suspension system for vehicles[C]//2017 International Conference on Circuit,Power and Computing Technologies. Piscataway:IEEE,2017:1-5. [4] ABOUGARAIR A,OUN A,EMHEMMED A.Intelligent control design for linear model of active suspension system[C]//2018 30th International Conference on Microelectronics(ICM 2018). Piscataway:IEEE,2018:17-20. [5] 王孝鹏,陈秀萍,纪联南,等.基于模糊PID控制策略的二自由度半主动悬架仿真研究[J].广西科技大学学报,2017,28(2):35-41. [6] JEONG J H,KIM S Y,KWON B S.Preview control of automotive active suspension systems to improve ride comfort using V2V communication [C]//2021 21st International Conference on Control,Automation and Systems.Piscataway:IEEE,2021:1726-1729. [7] 陈学文,曹晓政,任治. 1/2汽车主动悬架模糊控制器设计及Simulink仿真研究[J]. 辽宁工业大学学报(自然科学版),2016,36(2):117-121. [8] HO C M, AHN K K. Adaptive neural networks control for half-car active suspension systems with prescribed performance and actuator fault [C]//2021 24th International Conference on Mechatronics Technology. Piscataway:IEEE,2021:1-6. [9] 程振扬,杨明,吴心杰,等.基于BP神经网络PID控制的主动悬架仿真分析[J].农业装备与车辆工程,2022,60(2):130-134. [10] 李刚,顾瑞恒,徐荣霞,等.车辆磁流变半主动悬架模糊LQG控制策略研究[J].噪声与振动控制,2021,41(4):129-136. [11] SONG W,XUE W.Vibration attenuation for half-vehicle active suspension using Type-2 fuzzy neural network optimized by cuckoo search [C]//2021 5th International Conference on Automation,Control and Robots(ICACR 2021).Piscataway:IEEE,2021:173-178. [12] 侯忠生.无模型自适应控制的现状与展望[J].控制理论与应用,2006(4):586-592. [13] 曹荣敏,郑鑫鑫,侯忠生.基于改进多入多出无模型自适应控制的二维直线电机迭代学习控制[J].電工技术学报,2021,36(19):4025-4034. [14] SHI Y,HU S,CHEN L,et al. Secondary frequency control for islanded MG based on model-free adaptive control[C]//2020 5th Asia Conference on Power and Electrical Engineering.Piscataway:IEEE,2020:612-616. [15] 许佳东,高远,袁海英.四轮转向汽车的无模型自适应控制研究[J].广西科技大学学报,2022,33(3):29-35. [16] 高远,范健文,潘盛辉,等.汽车非线性主动悬架系统的分数阶模糊控制[J].中国机械工程,2015,26(10):1403-1408. [17] 王文佳,侯忠生.基于无模型自适应控制的自动泊车方案[J].控制与决策,2022,37(8):2056-2066. [18] 朱硕.改进的无模型自适应控制算法及其应用研究[D].天津:天津大学,2019. [19] CROLLA D,喻凡.车辆动力学及其控制[M].北京:人民交通出版社,2004. Research on model-free adaptive control of automotive nonlinear suspension system WANG Xianming1, GAO Yuan*1,2, LONG Wen3, LI Zhijian3 (1. School of Automation, Guangxi University of Science and Technology, Liuzhou 545616, China; 2. Guangxi Key Laboratory of Automotive Component and Vehicle Technology (Guangxi University of Science and Technology), Liuzhou 545616, China; 3. Technology Center of Passenger Vehicle, Dongfeng Liuzhou Automobile Co.LTD, Liuzhou 545005, China) Abstract: Aimed at the control of nonlinear suspension system, this paper establishes a mathematical model of half car, and proposes an improved model-free adaptive control method with a double-input-double-output structure. The vertical vibration acceleration and pitch angular acceleration of the vehicle body are selected as the feedback variables, zero acceleration is used as the control expectation, and the operating forces of the front and rear suspensions are controller outputs. The work starts from the dual-input-double-output compact dynamic linearization model, then derives the mathematical expression of the controller based on a weighted and improved control criterion function, and analyzes the stability of the suspension control system theoretically. The control simulation comparison results of different road surfaces and vehicle speeds show that, compared with the traditional model-free adaptive control, this method can not only further reduce the vertical vibration acceleration of the vehicle body, the dynamic stroke, the tire deformation, and the pitch angular acceleration of the vehicle body, but also improve the performance of the vehicle ride and handling stability. Key words: vehicle; nonlinear suspension system; vertical vibration; pitching motion; model-free adaptive control (責任编辑:黎 娅)
猜你喜欢
科学(2020年3期)2020-11-26
中国自行车(2018年12期)2019-01-29
小太阳画报(2018年3期)2018-05-14
阅读与作文(小学低年级版)(2016年12期)2016-12-22
公民与法治(2016年18期)2016-05-17
公民与法治(2016年9期)2016-05-17
汽车文摘(2015年11期)2015-12-02
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
减速顶与调速技术(2014年2期)2014-03-15
测绘科学与工程(2013年3期)2013-03-11
