非理想检测下面向异步多目标跟踪的异构多雷达网络功率时间联合优化算法
2023-07-04 09:51时晨光唐志诚丁琳涛周建江
雷达学报 2023年3期
时晨光 唐志诚 丁琳涛 周建江
(南京航空航天大学雷达成像与微波光子技术教育部重点实验室 南京 210016)
1 引言
当今及未来战场环境已经呈现出如下特点:(1)作战要素、作战样式复杂化;(2)战场资源种类繁多且属性各异;(3)资源配置具有一定时间紧迫性。传统的单基地雷达受到平台局限性的影响,难以完成既定目标探测任务,也无法满足作战要求[1,2]。因此,异构多雷达网络逐渐崭露头角。异构多雷达网络是指由具有不同工作体制的若干种类型雷达网络构成的有机整体[3],在空间复用、波形分集以及抗干扰能力等方面都具有显著优势。异构多雷达网络系统通过收集不同雷达网络多个雷达节点获取的量测信息来实现远距离多目标的探测,具有较强的分布式并行感知计算能力、优越的鲁棒性和较低的任务容错率,在不同领域都具有广阔的应用前景[4]。
随着信号处理技术的迅速发展,面向多目标跟踪的雷达辐射资源管理研究成为主流,如何高效分配雷达系统的有限辐射资源以提升多目标协同跟踪性能,已经成为国内外学者聚焦的研究课题[5—9]。2019年,Yan等人[10]基于Pareto理论提出了一种相控阵雷达驻留时间优化算法,该算法以提高多目标跟踪精度以及目标信噪比作为双优化目标,并采用线性规划方法结合Min-Max算法进行求解,仿真结果表明,该算法能够同时提升多目标跟踪精度以及目标信噪比。Zhang等人[11]针对分布式多输入多输出(Multiple-Input Multiple-Output,MIMO)雷达多目标检测与跟踪问题,以最坏情况下的目标后验克拉美罗下界(Posterior Cramér-Rao Lower Bound,PCRLB)以及检测概率作为代价函数,采用改进粒子群算法自适应优化设计系统发射机-接收机选择方式、辐射功率和信号带宽的分配,仿真结果表明,该算法具有更优越的实时性以及更好的多目标跟踪性能。2020年,靳标等人[12]基于合作博弈思想,研究了基于多目标跟踪的去中心化组网雷达功率分配问题,仿真结果表明,相较于功率均匀分配算法,所提算法可以有效提升多目标跟踪性能;相较于基于非合作博弈的功率分配算法,所提算法能够分配给对提升目标跟踪性能作用更显著的雷达节点更多的功率,提升了资源利用效率。文献[13]提出了一种大规模MIMO雷达网络认知目标跟踪功率和阵列选择联合优化算法,推导了目标跟踪的预测条件克拉美罗下界(Predicted Conditional-Cramér-Rao Lower Bound,PC-CRLB)并将其作为目标函数进行优化,并提出了基于局部搜索的求解算法对功率和阵列选择进行设计。Lu等人[14]针对频谱共存下组网相控阵雷达系统多目标跟踪场景,提出了一种基于目标跟踪性能的动态资源调度算法,根据通信区域干扰模型推导出目标的PCRLB并将其作为多目标跟踪性能指标,实现了雷达与通信频谱共存下的多目标协同跟踪性能优化。
2021年,Sun等人[15]在传感器位置不确定情况下,针对组网雷达多目标跟踪场景以及出现的雷达量测信息冗余问题,提出了一种量测信息选择与功率联合优化分配算法,该算法可以同时优化辐射功率和量测信息选择传播路径,以提升多目标跟踪精度和降低数据处理负担,采用稀疏性增强的序列凸规划算法进行求解并通过仿真实验进行了有效验证。同年,他们又研究了杂波环境下组网集中式MIMO雷达系统多目标跟踪问题,提出了一种雷达选择和波束图设计联合优化分配算法,旨在优化每部雷达的调度方法和波形相关矩阵来最大限度地提高目标跟踪精度[16]。2022年,文献[17]针对欺骗干扰下的多目标跟踪场景,研究了分布式MIMO雷达的联合资源优化问题,通过基于三步优化循环的算法对系统发射机、接收机联合选择以及辐射功率进行自适应优化设计,仿真结果表明,离干扰机较近且归一化欺骗参数较低的雷达发射机会被分配更多的功率资源,从而有效提升多目标跟踪性能。Su等人[18]提出了一种机动目标跟踪场景下的组网集中式MIMO雷达波形控制与资源联合优化算法,以最小化机动目标跟踪误差作为优化目标,采用改进粒子群算法进行求解,达到了提升机动目标跟踪精度的目的。
雷达的系统性能不仅受自身辐射参数的影响,还与自身系统构型紧密相关,相较于同构雷达,异构雷达具备更灵活的资源分配方式和更卓越的目标探测能力。此外,在实际中,各个雷达节点的时间基准、初始采样时间与采样间隔可能是不同的,因此,雷达系统得到的目标量测信息是异步的。围绕异构雷达系统资源管理以及异步目标跟踪问题,国内外学者进行了大量研究[19,20]。2013年,文献[21]针对异步目标跟踪问题,提出了一种多基地雷达系统功率分配算法,根据量测信息的最优顺序融合推导了目标跟踪精度计算表达式并作为优化目标函数,以辐射功率上下限以及总辐射功率限制为约束条件,建立了多基地雷达系统的异步观测模型,结合凸松弛方法以及梯度投影法进行求解。2019年,文献[22]研究了一种杂波环境下异步雷达网络目标跟踪的功率带宽联合分配算法,在给定系统辐射功率和发射带宽限制的约束条件下,采用分支归约界定算法来进行求解,仿真结果表明,相较于均匀功率带宽分配对比算法,该算法可以明显提升目标跟踪精度。2020年,文献[23]将异构雷达网络与异步多目标跟踪相结合,提出了两种最优资源分配方法,并结合梯度投影法和双上升法对每个融合采样间隔内异构雷达网络的辐射功率和驻留时间进行优化设计,在不同情况下分别有效提升了系统的多目标跟踪精度和射频隐身性能。
然而,上述研究均是在理想检测环境下开展的。实际上,目标雷达散射截面(Radar Cross Section,RCS)起伏以及信号辐射衰减等不确定因素会导致雷达系统的检测概率小于1[24,25]。针对该问题,国内外学者开展研究,取得了一定进展。2020年,Sun等人[26]提出了一种非理想检测下的多基地雷达系统多目标跟踪功率分配算法,该算法推导了非理想检测下的目标状态估计误差PCRLB表达式,并将其作为目标函数,在满足节点选择和功率限制的约束条件下,采用了基于Zoutendijk可行方向法的求解算法对优化模型进行求解,仿真结果表明,该算法可以显著提升系统多目标跟踪精度。2022年,在文献[26]的基础上,文献[27]研究了检测概率变化下的多基地雷达系统波束和功率联合优化分配问题,分析了检测概率与目标RCS、波束分配方式以及辐射功率等参数的数学关系,推导了非理想检测下的目标PCRLB并基于此构建了总体代价函数,以给定的波束和功率资源限制为约束条件,建立了相应的数学优化模型,采用结合贪婪策略和Zoutendijk可行方向法的三步分解算法进行求解,仿真结果验证了所提算法对检测概率变化时多目标跟踪性能的提升。张永平[28]针对雷达系统多目标跟踪背景,提出了一种非理想检测环境下的资源管理算法,通过枚举计算方式得到了非理想检测下的目标PCRLB并作为优化目标函数,对发射波束和功率等参数进行优化分配,从而提升了多目标跟踪精度。
上述研究成果为提升雷达系统的目标跟踪性能奠定了坚实基础,然而,已有研究并未考虑在非理想检测环境下针对异构多雷达网络异步多目标跟踪场景进行资源联合优化。因此,本文围绕非理想检测、异步多目标跟踪以及异构多雷达网络辐射资源管理等领域,研究了非理想检测下面向异步多目标跟踪的异构多雷达网络功率时间联合优化问题。首先,针对异构多雷达网络,在非理想检测下,建立了面向异步多目标跟踪的功率时间联合优化模型,以最小化异步多目标跟踪误差为优化目标,在满足给定的系统辐射资源限制前提下,通过联合优化异构多雷达网络中各雷达节点的选择方式、辐射功率和驻留时间等发射参数,提升系统的异步多目标跟踪精度。仿真结果表明,与现有算法相比,所提算法能够有效降低异构多雷达网络的异步多目标跟踪误差,提升跟踪精度。
2 系统模型
假设异构多雷达网络系统由M部不同体制和工作模式的雷达子网络组成,系统中第m(m=1,2,...,M)部雷达网络中包含Nm个雷达节点,且第m部雷达网络中的第n(n=1,2,...,Nm)个雷达节点的坐标为(xn,m,yn,m)。同时,由于不同雷达网络中的雷达节点工作模式不同,各雷达节点发射信号的载波频率可能不同,对于目标q,它们的初始采样时间和采样间隔也可能是不同的。为了后续小节中的进一步推导与计算以及更好地展现多雷达网络的异构特性,定义如下3种类型的雷达网络及发射参数约束:
(1) 集中式MIMO雷达网络:在同时多波束工作模式下,雷达节点照射目标的驻留时间固定,但辐射功率会发生变化[29];
(2) 相控阵雷达网络:该雷达网络中的雷达节点可以快速自适应地旋转波束以照射多个目标,基于此,该雷达网络中的雷达节点辐射功率固定,但驻留时间不同;
(3) 机械雷达扫描网络:该雷达网络中的雷达节点工作参数固定,即所有雷达节点以固定的辐射功率、驻留时间照射目标。
2.1 目标运动模型
假设异构多雷达网络系统的融合采样间隔为Tfusion,且第k个融合采样间隔的区间为(tk-1,tk],则Tfusion=tk-tk-1。因此,在第k个融合采样间隔,根据目标初始位置和运动速度,目标q的状态向量可以表示为
其中,{·}T表示矩阵的转置运算,根据状态向量,将第k个融合采样间隔时目标q的运动状态方程表示为
其中,Fq表示目标q的状态转移矩阵。由于目标作匀速直线运动,可以将Fq计算为
其中,γq表示目标q的过程噪声强度。
2.2 异步雷达量测模型
为了简化后续小节中的推导与计算,在本节中做出如下假设:(1)在每个融合采样间隔,异构多雷达网络中的每个雷达节点最多只能被分配去跟踪一个目标;(2)所有雷达节点只能接收来自自身发射信号的回波。
在异构多雷达网络进行异步多目标跟踪时,系统中各个雷达节点的初始采样时间和采样间隔可能不同。因此,需要考虑雷达量测信息的异步特性。假设第k个融合采样间隔内第m部雷达网络中的第n个雷达节点对目标q的量测信息数目为,其中,第个量测信息的到达时刻为。基于此,图1给出了目标q在第k个融合采样间隔内的异步量测模型。

图1 目标q在第k个融合采样间隔内的异步量测模型Fig.1 Asynchronous measurement model of target q in the k-th fusion sampling interval
在此基础上,定义一个二元变量来描述异构多雷达网络中各雷达节点与目标q的配对情况,即
它们与雷达相关发射参数的关系可以表示为[10]
3 异构多雷达网络功率时间联合优化算法
3.1 非理想检测下的异步目标BCRLB推导
由于贝叶斯克拉美罗下界(Bayesian Cramér-Rao Lower Bound,BCRLB)可以为参数无偏估计的均方误差(Mean Square Error,MSE)提供一个下界[30],因此,大多数学者将其作为目标跟踪精度的衡量指标。在第k个融合采样间隔,将异构多雷达网络系统中不同雷达节点关于目标q的复合量测信息按顺序依次列为
然而,根据文献[27],在非理想检测环境下,异构多雷达网络中的雷达节点并不都能对所有跟踪目标成功检测,还可能存在漏检。基于此,定义如下二元变量来表征第k个融合采样间隔时异构多雷达网络对目标q的检测情况:
综上所述,结合式(11)—式(14),在非理想检测下,结合不同雷达节点对目标q的量测信息数目,将第k个融合采样间隔目标q的异步跟踪误差BCRLB计算为[27]
3.2 优化模型建立
本文提出了一种非理想检测下面向异步多目标跟踪的异构多雷达网络功率时间联合优化算法,通过在各个融合采样间隔联合优化雷达节点选择方式、辐射功率以及驻留时间,在满足给定系统射频辐射资源限制的约束条件下,最小化异构多雷达网络异步多目标跟踪误差。
然而,在异步多目标跟踪时,在不同雷达节点不同量测信息的到达时刻都进行功率时间联合优化是不合理的。基于此,本文所提算法应用于每个融合采样间隔Tfusion。为了简化后续求解,对于目标q,假设在每个融合采样间隔内,不同雷达网络中的各个雷达节点以相同的发射参数进行照射:
结合式(19),建立优化模型如下:
从式(20)中可以看出,第1个约束条件表示不同类型雷达网络中雷达节点辐射功率取值范围;第2个约束条件表示不同类型雷达网络中雷达节点驻留时间取值范围;第3个约束条件表示跟踪单个目标时的异构多雷达网络辐射资源总量限制;第4个约束表示单个雷达节点跟踪目标数量的限制;第5个约束表示跟踪单个目标的雷达节点数量限制。
3.3 优化模型求解
步骤1 求解雷达节点选择问题。
步骤2 依次求解辐射功率和驻留时间优化分配问题。
从优化模型(22)可以看出,此时的优化模型包含辐射功率变量、驻留时间变量以及相应的资源约束,因此,它仍然是一个非线性、非凸问题。基于此,对优化模型(22)进行等价转换,可以得到分别优化辐射功率资源和驻留时间资源的两个子优化问题,如下所示:
步骤3 指定下一个跟踪目标进行资源优化分配。
移除步骤1中选取的雷达节点以及目标q,指定下一个跟踪目标,重复步骤1和步骤2,直到所有跟踪目标都被分配相应的雷达节点、辐射功率和驻留时间资源。
步骤4 采用循环最小法得到最优资源分配结果。
采用循环最小法,重复步骤1至步骤3,直到连续两次迭代的目标函数值(即异步目标跟踪精度)小于一个预设的固定值,循环终止。基于此,可以得到异构多雷达网络系统异步多目标跟踪的最优雷达节点选择结果、辐射功率分配结果和驻留时间分配结果。此外,将求解得到的作为下一融合采样间隔资源联合优化的初始参数。
综上所述,非理想检测下面向异步多目标跟踪的异构多雷达网络功率时间联合优化算法如算法1所示。
4 仿真结果及分析
为了验证本文所提非理想检测下面向异步多目标跟踪的异构多雷达网络功率时间联合优化算法的可行性和优越性,本文设计了如下仿真场景。考虑异构多雷达网络系统由M=3部独立工作且不同类型的雷达网络组成,其中,雷达网络1为集中式MIMO雷达网络,包含N1=5个雷达节点;雷达网络2为相控阵雷达网络,包含N2=5个雷达节点;雷达网络3为机械扫描雷达网络,包含N3=2个雷达节点,各雷达节点的发射参数如表1所示。此外,异构多雷达网络系统监视区域中的运动目标个数为Q=2,图2给出了异构多雷达网络分布与目标运动轨迹,目标具体运动轨迹参数如表2所示。同时,表3给出了每个融合采样间隔内各雷达节点的初始采样时间和采样间隔。在仿真场景中,假设异构多雷达网络固定分配不同雷达网络中共计Lmax=5个雷达节点去跟踪每个目标,且将目标RCS固定为1 m2。

表3 各雷达节点的初始采样时间和采样间隔Tab.3 Initial sampling time and sampling interval of each radar node

算法1 非理想检测下面向异步多目标跟踪的异构多雷达网络功率时间联合优化算法Alg.1 Joint optimization of transmit power and dwell time for asynchronous multi-target tracking in heterogeneous multiple radar networks with imperfect detection

图2 异构多雷达网络分布与目标运动轨迹Fig.2 Deployment of heterogeneous multiple radar networks and trajectories of moving targets
为了更好地说明异构多雷达网络雷达节点选择与功率时间联合优化的规律与内在关系,图3和图4分别给出了=0.9时目标1和目标2的雷达节点选择与功率时间优化结果,黑色部分表示该雷达节点在对应融合采样间隔未被赋予跟踪任务,即=0。从中可以看出,异构多雷达网络会优先选择距离目标更近雷达网络中的雷达节点进行目标跟踪,各雷达节点的辐射功率和驻留时间资源随着目标的运动自适应地进行优化分配,从而最大限度地降低异构多雷达网络异步多目标跟踪误差,提升多目标跟踪性能。例如,对于目标1,在跟踪的前25个融合采样间隔,异构多雷达网络都选择了集中式MIMO雷达网络的第1~4个节点进行跟踪,在最后10个融合采样间隔,由于目标1运动到距离相控阵雷达网络更近的位置,系统会逐渐选择相控阵雷达网络中的雷达节点进行跟踪。此外,雷达节点的初始采样时间以及采样间隔也会影响雷达节点选择方式与功率时间优化结果,异构多雷达网络会优先选择在融合采样间隔内次数较多的雷达节点,以降低多目标跟踪误差。例如,对于目标2,异构多雷达网络更多地选择了集中式MIMO雷达网络以及相控阵雷达网络中的雷达节点,而并不选择距离目标2更近的机械扫描雷达网络中的第2个节点进行跟踪。分析其原因为:机械扫描雷达网络中的第2个节点采样间隔为3 s,大于另外两个雷达网络中雷达节点的采样间隔,因此,在同一个融合采样间隔中,其采样次数较少,能够获取的雷达量测信息数目也较少,这会导致异步多目标跟踪精度变差。
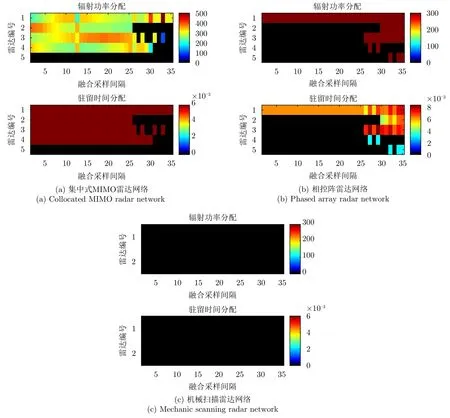
图3 目标1的雷达节点选择与功率时间优化结果Fig.3 Radar node selection,power and dwell time optimization results of target 1
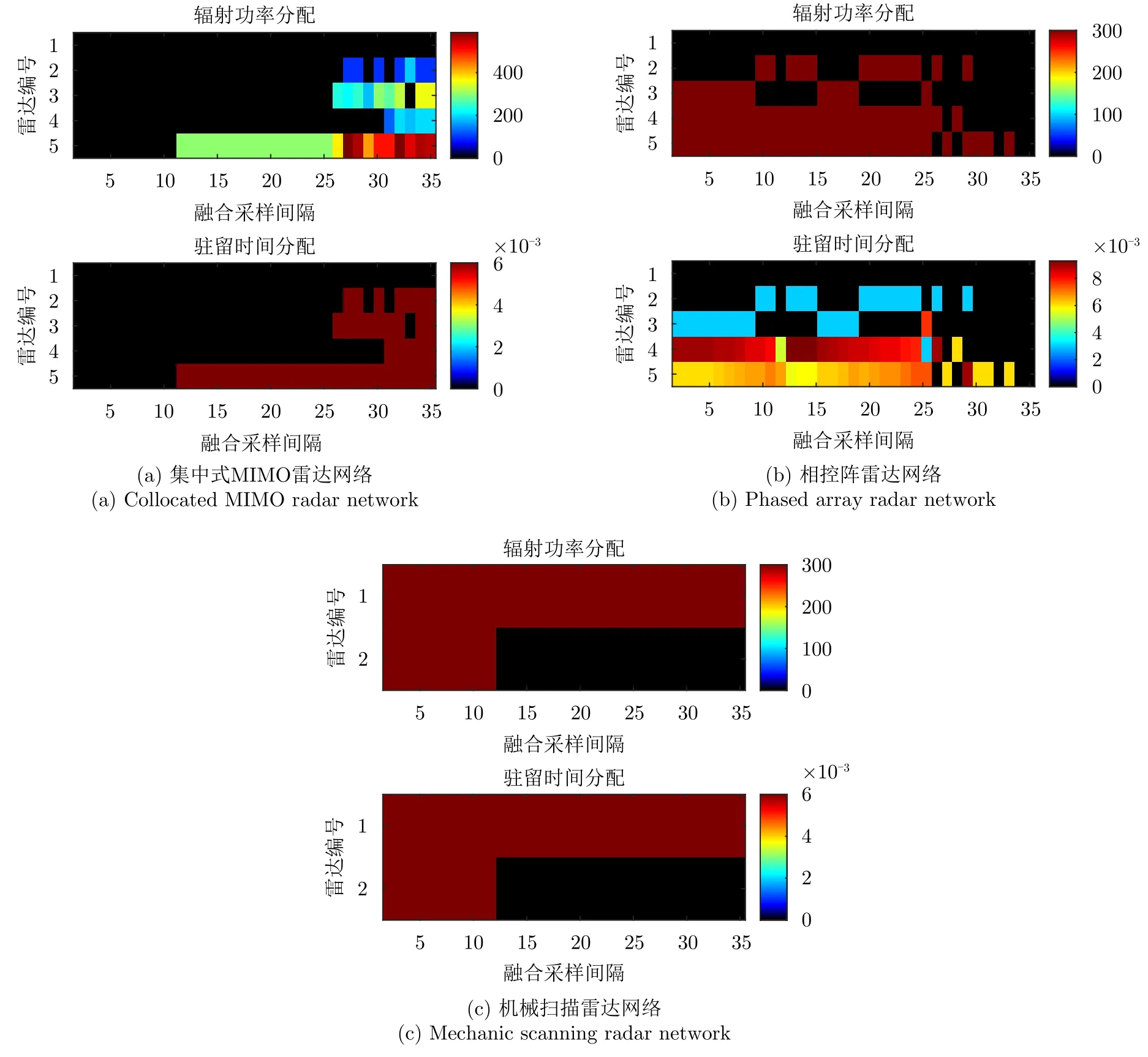
图4 目标2的雷达节点选择与功率时间优化结果Fig.4 Radar node selection,power and dwell time optimization results of target 2
为了更好地展现检测概率变化对异构多雷达网络异步多目标跟踪精度的影响,图5给出了不同检测概率下各目标的BCRLB对比。从图中可以看出,相较于理想检测条件(即检测概率为1.0),非理想检测下目标状态估计误差的BCRLB更大,这表明目标跟踪误差也更大。此外,随着检测概率的不断降低,异构多雷达网络异步多目标跟踪的检测环境逐渐变得恶劣,当检测概率从0.9降低到0.8时,各目标跟踪的BCRLB均明显增大,这表明在系统可用辐射资源限制相同的情况下,检测概率变化会对异步多目标跟踪精度产生明显影响。

图5 不同检测概率下的各目标BCRLBFig.5 BCRLB of each target with different probabilities of detection
为了更有效地说明本文所提算法对异构多雷达网络异步多目标跟踪性能的提升,本节采用如下4种算法作为对比,比较分析它们与本文所提算法之间的性能差异:
(1) 节点随机选择算法:在每个融合采样间隔,分配给各个目标的雷达节点是随机选择的,同时通过求解优化问题(20),将辐射功率和驻留时间的优化结果分配给所选择的雷达节点;
(2) 功率均匀分配算法:固定异构多雷达网络跟踪目标的辐射功率,仅优化驻留时间资源;
(3) 时间均匀分配算法:固定异构多雷达网络跟踪目标的驻留时间,仅优化辐射功率资源;
(4) 功率时间均匀分配算法:同时固定异构多雷达网络跟踪目标的辐射功率资源和驻留时间资源。
定义目标跟踪的平均均方根误差(Average Root Mean Square Error,ARMSE)来表征异步多目标跟踪精度:
其中,NMC=100为蒙特卡罗实验次数;表示目标q在第l次蒙特卡罗试验时被异构多雷达网络辐射的总次数。
图6给出了所有算法的各目标ARMSE对比图。从图中可以看出,本文所提算法能够在满足异构多雷达网络射频辐射资源限制的约束条件下,通过联合优化系统中各雷达节点选择方式、辐射功率和驻留时间,求解得到相比于其他4种对比算法更优越的异步多目标跟踪精度。此外,本文所提算法在检测概率为1.0,0.9和0.8时的单帧CPU计算耗时分别为0.46 s,1.03 s和1.08 s,远远小于预设的融合采样间隔。因此,本文所提算法可以在满足作战场景实时性的同时,有效提升异步多目标跟踪性能。

图6 各目标ARMSE对比结果Fig.6 ARMSE comparison results of each target
5 结语
本文考虑了非理想检测、异构多雷达网络和异步多目标跟踪对射频辐射资源消耗以及多目标跟踪性能的影响,提出了一种面向异步多目标跟踪的异构多雷达网络功率时间联合优化算法。该算法以最小化异构多雷达网络异步多目标跟踪误差为优化目标,在满足给定系统射频辐射资源限制的前提下,对雷达节点选择方式、辐射功率和驻留时间等发射参数进行自适应优化设计,以提升异构多雷达网络的异步多目标跟踪精度。仿真结果表明,与节点随机选择算法、功率均匀分配算法、时间均匀分配算法以及功率时间均匀分配算法相比,本文所提算法能够有效降低异构多雷达网络的异步多目标跟踪误差,达到提升其目标跟踪性能的目的。然而,在实际作战场景中,检测概率与目标RCS、密集环境杂波等多种不确定因素息息相关,在多目标跟踪过程中,检测概率会不断发生变化,下一步将围绕检测概率变化下面向异步多目标跟踪的异构多雷达网络多域资源联合优化问题进行研究。
猜你喜欢
小学教学研究(2022年5期)2022-04-28
电子制作(2019年15期)2019-08-27
渭南师范学院学报(2018年24期)2019-01-07
小学生学习指导(低年级)(2018年12期)2018-12-29
科教导刊(2017年26期)2017-11-07
中国洗涤用品工业(2017年2期)2017-04-16
电子技术与软件工程(2016年22期)2016-12-26
电信科学(2016年11期)2016-11-23
通信电源技术(2016年6期)2016-04-20
火控雷达技术(2016年3期)2016-02-06