桥梁车辆荷载识别的贝叶斯方法研究
2023-07-10 10:29茅建校庞振浩王浩王飞球
振动工程学报 2023年2期
关键词:模式选择
茅建校 庞振浩 王浩 王飞球

摘要 基于贝叶斯推理提出了一种可实现误差模式选择的桥梁车辆荷载识别方法。该方法通过静力影响线构建车辆荷载与实测响应的关系表达式,并建立修正曲面以消除动力效应造成的识别误差。引入与结构响应大小和车速相关的五种误差模式。根据假设的先验分布推导车辆轴重参数的后验分布,以获得车辆荷载的最优估计值和置信区间,并计算各误差模式的后验概率。分别采用简支梁数值算例和某连续梁桥动载试验,对该方法在不同车速工况下的识别精度和可靠性进行了验证。结果表明,修正曲面可以有效消除车辆动力冲击的影响,提高了荷载识别精度;荷载识别结果以置信区间形式呈现,可量化荷载识别结果的不确定性;贝叶斯方法能够识别出最佳误差模式,进一步提升了荷载识别的鲁棒性。
关键词 车辆荷载识别; 贝叶斯推理; 不确定性量化; 模式选择; 动力响应消除
引 言
运营条件下的桥梁车辆荷载识别对于交通轴载调查、桥梁维护管理、超载治理和桥梁耐久性与安全性评价等具有重要意义。近年来,随着中国交通货运量呈现爆发式的增长,重车和超重车已逐渐成为最重要的运输工具之一[1]。动态称重(Weigh?in?Motion, WIM)技术可以在不中断交通的情况下获得车辆的轴重、轴距以及车速等信息。然而,WIM技术须将称重传感器安装在路表面,存在安装复杂、成本较高和易损坏等缺点,且荷载识别精度受路面刚度与不平整度的影响較大[2?3]。与传统的动态称重技术比较,桥梁动态称重(Bridge?WIM,B?WIM)技术具有成本低、精度高、耐久性好等优点。
B?WIM技术是通过测量桥梁在车辆作用下的结构响应,求解获得车辆轴重等信息的技术[4?5]。目前,B?WIM方法可分为静力法[6?7]和动力法[8?10]两大类。Moses算法[6] 是经典的静力法之一,它的核心思想是最小化实测桥梁响应与利用影响线概念计算的响应之间的差异来识别车辆轴重。然而,由于实测响应为动力响应,利用静力影响线得到的理论响应为静力响应,导致该算法存在一定的误差。动力法采用桥梁结构动力响应时程进行车辆荷载识别,从动力角度对荷载和响应的关系进行建模,理论上具有较高的精度,但动力法依赖于精确的桥梁有限元建模和分析,计算效率低,不易在现代商业B?WIM系统中应用[11]。另一方面,静力法易于实现,只要对实测响应进行误差处理或其信噪比足够高,静力法可获得较高的精度。影响线是Moses算法的重要参数,耿少波等[12] 针对桥梁结构影响线的标定方法进行说明与求解,并推导车辆荷载计算的通用矩阵表达式,为B?WIM系统开发提供了理论支持。王宁波等[13] 通过梯度法对Moses算法得到的初始荷载识别值进行局部优化,进一步提高了荷载识别精度。Tikhonov正则化技术[14] 是解决响应误差问题的一种思路,主要通过在原最小化公式中添加附加罚项来实现消除动力的影响。Liu等[15] 借鉴交替迭代法和正则化技术,提出一种基于半凸函数的移动荷载识别方法,通过迭代得到恒力分量和时变力分量,与L2正则化和移动平均Tikhonov正则化相比,该方法可以进一步提高移动荷载识别精度。Pan等[16] 提出一种基于稀疏自估计传感器网络的桥梁车辆荷载识别方法,该方法考虑每个传感器的信号特征、噪声能量和信噪比,以传感器的加权残差来定义代价函数,改进了L2范数正则化模型。张梓航等[17] 提出了一种基于双稀疏字典和稀疏K?SVD字典学习算法的动态荷载识别方法。张龙威等[18] 提出了桥梁动态称重迭代算法,该算法通过Moses算法和实测影响线算法之间的反复迭代实现。随着桥梁跨径增大、桥面行驶车辆数增多,基于Moses算法荷载识别方法的精度和稳定性呈逐步下降的趋势[19?20],因此目前B?WIM技术大多针对中小跨径桥梁并且只考虑单辆车过桥的工况。
从参数识别的角度来看,车辆荷载识别值是最优值或估计值,具有不确定性。然而,现有的B?WIM算法较少根据车辆轴重的概率分布来考虑其不确定性[21] 。针对车辆荷载的不确定性,Yoshida等[22] 将贝叶斯理论应用于轴重识别,从概率分布角度实现了不确定性分析,同时也表明了观测误差建模的重要性;Yu等[21] 提出了一种基于生成对抗网络(GAN)的车辆轴重概率估计方法;此外,Yang[23] 提出了一种基于非概率理论的面向不确定性的正则化荷载识别方法,但这些研究仅仅限于参数识别层面,而缺乏对误差模式选择的研究。从数据采集的角度看,不同类型的样本数据的误差模式可能不同,误差模式选择不当可能会导致参数识别精度下降[24] 。然而,误差模式的优选尚未被相关文献报道。
本文提出了一种基于贝叶斯推理的桥梁车辆荷载识别方法。该方法主要包括置信区间估计、模式选择和动力响应消除,通过修正曲面实现了动力响应的消除,通过贝叶斯推理对误差模式进行了优化选择,从而提高了荷载识别的精度,并对荷载估计值的不确定性进行量化。最后,通过数值算例和某连续梁桥动载试验对该方法的可靠性进行了验证,以期为桥梁的长期运营和维护管理提供科学依据。
1 基于贝叶斯推理的桥梁车辆荷载识别方法
1.1 荷载与响应的关系
假设一辆K轴车辆行驶通过窄桥(不考虑横向效应),对车辆的位置数据和响应数据进行采样,构建荷载与响应的关系表达式如下:
式中 Ri为第i次采样的理论响应;K为车辆的车轴数目;Ak为第k个车轴的轴重(前轴为第1个车轴);I(x)为位置x处的影响系数[25] ;xik为在第i次采样中第k个车轴的位置。
整理N次采样的数据,荷载与响应的关系式以矩阵的形式表示为:
式中 R∈RN×1为理论响应向量,R=[R1 R2 R3 … RN]T;A∈RK×1为轴重荷载向量,即待求未知数向量,A=[A1 A2 A3 … AK]T;I ∈RN×K为影响系数矩阵,矩阵的第i行第k列元素表示在第i次采样中第k个车轴对应位置处的影响系数,即
考虑到实测响应相对于静力响应存在误差,对荷载与响应的关系式引入误差项,表达式如下:
式中 R?∈RN×1为实测响应向量;ε ~ N(0, Σ0)代表实测响应存在的误差,即第i次实测响应的误差εi相互独立且服从零均值,方差为σ 2i的高斯分布。
参考Mu等[26] 的研究成果,并且考虑到σ 2i可能与实测响应R?i和速度大小Vi相关,本文针对方差σ 2i设定5种误差模式,表达式如下 :
式中 Vi为第i次采样中车辆行驶的速度,单位为m/s;λ为误差参数,可对与响应大小R?i和速度大小Vi相关的误差进行调整和控制。
基于上述线性回归模型,以M 表示该数学模型;D表示样本数据,即影响系数矩阵I 和响应向量R?;θ=[ATσ 20λ]T表示不确定的参数;p(D|θ,Cj)表示数据的似然函数,它反映待求参数θ和数学模型Cj 对数据D的拟合程度,似然函数为多维高斯分布,表达式为:
1.2 贝叶斯推理
1.2.1 先验分布
假设未知参数θ的先验分布是互相独立的,则:
式中 C1~C5代表误差模式Type1~5。
假设轴重荷载向量A的先验分布为服从均值μA(数值算例中,车辆为二轴普通小轿车,一般前轴重量是后轴的一半,总重量位于1.2~1.6 t之间,故取μA=[0.45 0.9]T。动载试验算例中,车辆为满载的三轴大型载重货车。参考GB 1589—2016《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限值》[27] ,单轴重量不超过11.5 t,因此在动载算例中取μA=[10 10 10]T)和协方差矩阵ΣA(协方差代表了轴重的先验分布的离散程度,数值算例取ΣA=diag[1 1],动载试验算例取ΣA=diag[1 1 1])的高斯分布:
误差方差σ 20服从具有形状参数α0和尺度参数 β0的逆伽马分布(α0和 β0决定了σ 20的离散程度,结合实测响应可能出现的误差ε,取α0=1, β0=1),表达式如下:
误差参数λ服从均值为0,标准差为σλ(由式(5)可知,λ不宜过大,取σλ为0.1)的正态分布:
1.2.2 后驗分布
根据贝叶斯定理,未知参数θ的后验分布[28] 为 :
Mu等[26]和Muto[29]对后验分布的最优值进行了相关推导,具体如下:
对于误差模式Type1,不确定参数θ=[ ATσ 20]T。通过最大化p(θ|D,Cj),可得到参数A和σ 20的最优值如下:
最优值A?(σ 20)和 σ? 20(A)是互相耦合的,通过迭代可得到其条件最优值。从A的极大似然解(ITI )?1IT R?开始,交替使用式(12)和(13),直到迭代稳定或误差小于预先设定的阈值。
目标函数J(θ)定义为p(θ|D,Cj)的负对数,表达式如下:
式中 Wk和Xk分别为“高斯?勒让德”积分的积分系数和积分节点。为了尽可能提高数值积分精度,本文采用了40个求积节点。
1.4 修正曲面
为研究桥梁动力因素对静力响应的影响,本文给出修正曲面的定义:一辆车以匀速Vi的速度行驶通过窄桥,前轴位于位置xi处时的动力响应为Rdi,对应的静力响应为Rsi,称Rsi/Rdi为修正系数ζi,则一个修正点为(xi, Vi, ζi);将各修正点连成一个曲面,称该曲面为修正曲面。本文通过有限元模拟的方法获得动力响应Rdi(时程分析)和静力响应Rsi,结果表明轴距相同、轴重不同但轴重成比例的车辆对应的修正曲面是相同的,利用下式可对实测响应的动力部分进行消除,得到静力响应Ri:
通常情况下,车辆刚驶入桥梁时的动力响应Rdi很微小,导致响应的修正系数ζi往往较大,故计算全桥范围内的修正曲面是不必要的。在简支梁数值算例中,二轴车(轴距2.5 m,前后轴的轴重比例为1∶2)通过计算跨径为30 m的简支梁桥,对跨中位移进行时程分析和静力分析,得到5~25 m范围内的修正曲面如图 1所示。在动载试验算例中,三轴加载车辆(轴距分别为3.5 m和1.35 m,前后轴的轴重的比例为10∶12∶13)行驶通过某连续梁桥梁(3 m×32.7 m),得到50~65 m范围内的修正曲面如图 2所示。
2 数值算例
2.1 算例设计
2.1.1 简支梁结构和加载车辆
简支梁跨径为30 m,采用等截面的形式,截面抗弯刚度EI为1.0×109 N·m2,质量密度为1020 kg/m3。加载车辆为二轴普通小轿车,轴距2.5 m,前轴轴重A1为0.5 t,后轴轴重A2为1 t。
在本研究中,二轴车辆以80 km/h匀速通过简支梁,以简支梁跨中位移响应的时程分析数据作为样本数据。
2.1.2 工况设计
为研究不同的误差模式的合理性和修正曲面消除动力响应的效果,本文设计两个工况对此进行探索。具体的工况设计如下:
工况①:响应数据R?为时程分析的动力响应,不加以动力消除;
工况②:响应数据R?为用修正曲面消除动力后的的“静力”响应。
2.2 计算结果
对车辆行驶通过桥梁时简支梁跨中竖向位移进行时程分析,得到其动力响应;计算桥梁的静力影响线,可获得相应的静力响应;利用修正曲面对动力响应进行动力消除,得到修正后的动力响应,如图3所示。结果表明,动力荷载和静力荷载存在较大的差异;动力消除后的响应和静力响应较为吻合,表明修正曲面消除动力的效果较好。
本文1.2.2中的推导表明,轴重荷载向量A、误差方差基本值σ 20和误差参数λ的最优值是互相耦合的,可通过迭代求解。图4(a)~(e)和图 5(a)~(e)分别给出了工况①和工况②下的5种误差模式的参数最优值的迭代求解过程,收敛阈值设置为1.0×10-10。结果表明,不同误差模式下的耦合参数均能在200次迭代内满足收敛阈值。其中,Type5需要的迭代次数最多。
对于工况①(如图 6所示),响应数据R?直接采用动力响应,由于动力响应与静力响应存在较大的误差,桥梁车辆荷载估计值与真值不能吻合;95%置信区间宽度较大,后验分布曲线“矮而胖”,表明不确定性较大;各误差模式中,模式Type5较合理,但各模式概率相差不大。对于工况②(如图7所示),响应数据R?为修正后的动力响应,各误差模式下的荷载估计概率分布峰值和荷载真值能够较好地吻合,能够对车辆荷载进行有效的识别;95%置信区间宽度较工况①小,表明不确定性较小,荷载识别精度得到提高;各误差模式中,模式Type5较合理,模式概率较Type1~4大,后验分布曲线“高而瘦”,不确定性较小。详细荷载识别算例结果数据如表 1所示。
3 实桥验证
3.1 桥梁结构和加载车辆
某三跨连续梁计算跨径为3×32.7 m,主梁采用等截面小悬臂单箱三室斜腹板箱梁,标准底板宽度11.4 m,翼缘板悬臂1.0 m,外挑翼缘厚度20~35 cm,1/2标准截面如图 8(a)所示。
加载车辆为满载的三轴大型载重汽车,轴距1和轴距2分别为3.5 m和1.35 m,前轴A1为10 t,后轴A2重13 t,后轴A3重12 t,总重35 t,如图 8(b)所示。动态挠度测点的位置为第二跨跨中截面的中心处,采用接触式顶杆位移计,采样频率为200 Hz,如图 9(a)所示。现场跑车试验采用东华软件分析系统对动态位移数据进行采集,加载车辆沿着道路中线行驶,如图 9(b)所示。
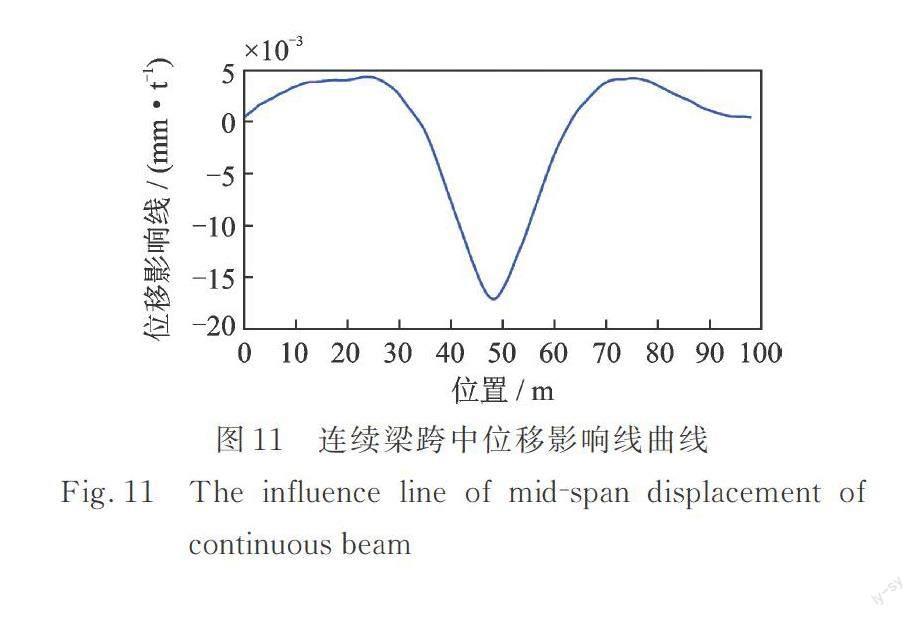
在本研究中,车辆以10,20,30 km/h匀速通过该连续梁,采集第二跨的跨中挠度的时程响应数据作为样本数据,如图10所示。
3.2 计算结果
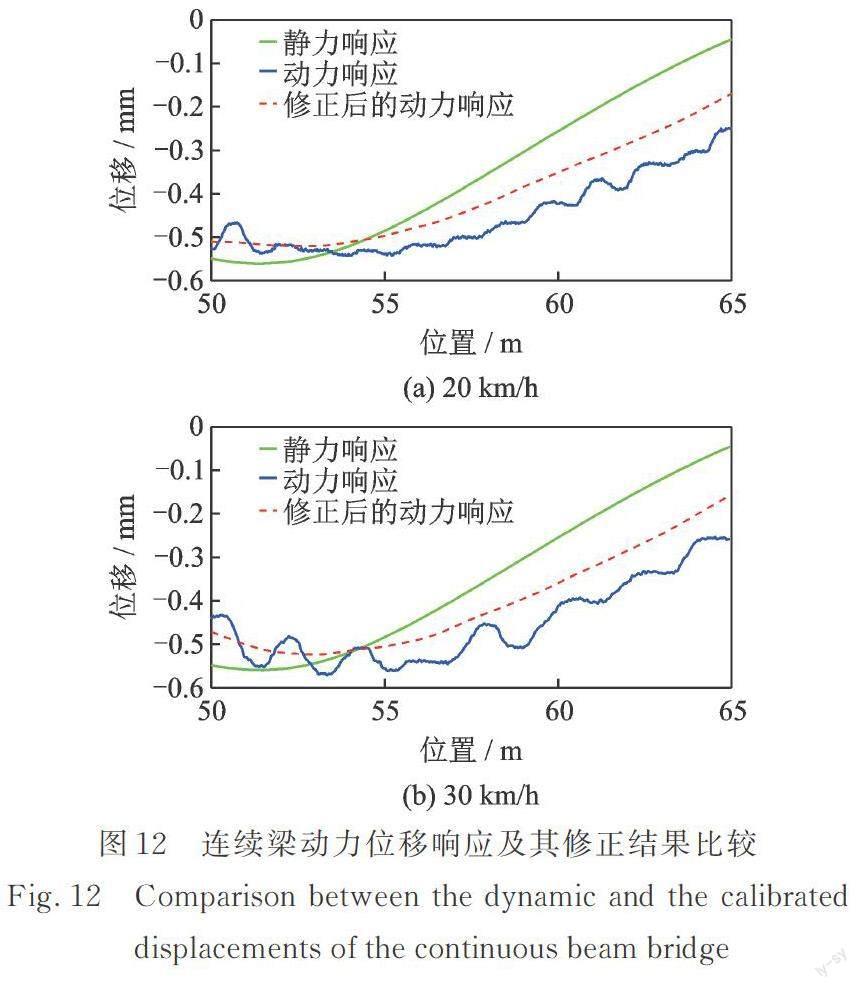
本研究对某连续梁桥进行荷载试验,获得桥梁结构在车辆速度为10,20,30 km/h速度下的跨中挠度响应曲线。车辆速度为10 km/h下的响應受到动力因素的影响相对较小,可视为静力响应。通过最小二乘法[31] ,可获得桥梁结构的位移影响线,如图11所示。对动力响应进行修正分为两个环节,首先采用平滑样条算法[32] 将动力响应曲线的局部误差消除,然后利用修正曲面对动力响应进行整体上的动力消除,得到修正后的动力响应,如图12所示。结果表明,动力荷载和静力荷载存在较大的差异;动力消除后的响应更接近静力响应。
通过类似“数值算例”中的迭代求解,可得耦合参数的最优值。计算结果表明,车辆速度为20 km/h的工况下5种误差模式收敛需要的迭代次数分别是10,12,15,11和115次;车辆速度为30 km/h的迭代次数分别是11,12,17,11和183次。由此可见,在设置收敛阈值为1.0×10-10的条件下,参数均能在200次迭代内满足收敛阈值,实现收敛。
图13和14分别给出了速度为20 km/h和30 km/h下5种误差模式对应的车辆荷载概率分布图,详细荷载识别算例结果如表 2所示。从车辆速度的角度来看,不同车辆速度下的桥梁车辆荷载估计结果差异不大。从不同的误差模式的角度来看,Type1~4的车辆荷载估计值与真值(A1=10 t,A2=12 t,A3=13 t)不能吻合;95%置信区间宽度较大,平均宽度为3.62,表明不确定性较大。Type5能够对车辆荷载进行精确识别,估计值和真值吻合良好;95%置信区间宽度较小,平均宽度为3.3,不确定性较小。从模式概率的角度来看,Type1~4对应的概率均较小,而Type5的概率接近100%。总体而言,误差模式Type5能较好地消除动力冲击的影响,准确地识别出各种速度下的桥梁车辆荷载,不确定性较小,可靠度高。
4 结 论
(1) 修正曲面可以有效地消除车辆动力冲击的影响,动力响应修正前后的荷载识别效果有较大差异, 修正曲面有效地提高了车辆荷载识别精度。
(2) 提出的方法能对车辆荷载识别结果以95%置信区间形式呈现,从而实现荷载识别不确定性量化,动力响应修正能有效地减少荷载识别的不确定性。
(3) 贝叶斯方法能够识别出最佳误差模式,并以概率的形式进行合理性评估,提高了荷载识别的鲁棒性和可靠性。在本研究的各算例中,Type5(σ 2i=σ 20λVi)相对于其他误差模式更为合理。
(4) 更优的误差模式假设有待后续研究进一步发现和探索。
参考文献
1冯海月, 伊廷华, 陈斌. 采用广义Pareto分布进行车辆荷载效应极值估计的研究[J]. 振动与冲击, 2015, 34(15): 7-11.
Feng Haiyue, Yi Tinghua, Chen Bin. Extreme estimation for vehicle load effect based on generalized Pareto distribution[J]. Journal of Vibration and Shock, 2015, 34(15): 7-11.
2OBrien E J, Znidaric A, Dempsey A T. Comparison of two independently developed bridge weigh?in?motion systems[J]. International Journal of Heavy Vehicle Systems, 1999, 6(1-4): 147-161.
3Jacob B, Beaumelle V F L. Improving truck safety: potential of weigh?in?motion technology[J]. IATSS Research, 2010, 34(1): 9-15.
4李小年, 陳艾荣, 马如进. 桥梁动态称重研究综述[J]. 土木工程学报, 2013, 46(3): 79-85.
Li Xiaonian, Chen Airong, Ma Rujin. Review of bridge weigh?in?motion[J]. China Civil Engineering Journal, 2013, 46(3): 79-85.
5任伟新, 左小晗, 王宁波, 等. 非路面式桥梁动态称重研究综述[J]. 中国公路学报, 2014, 27(7): 45-53.
Ren Weixin, Zuo Xiaohan, Wang Ningbo, et al. Review of non?pavement bridge weigh?in?motion[J]. China Journal of Highway and Transport, 2014, 27(7): 45-53.
6Moses F. Weigh?in?motion system using instrumented bridges[J]. Journal of Transportation Engineering, ASCE, 1979, 105(3): 233-249.
7Ojio T, Yamada K. Bridge weigh?in?motion systems using stringers of plate girder bridges[C]. Proceedings of the 3rd International WIM Conference, 2002: 209-218.
8OConnor C, Chan T H. Dynamic wheel loads from bridge strains[J]. Journal of Structural Engineering, ASCE, 1988, 114(8): 1703-1723.
9李忠献, 陈锋. 基于梁格法的桥梁移动荷载识别[J]. 土木工程学报, 2006, 39(12): 83-87.
Li Zhongxian, Chen Feng. Identification of moving loads on bridges using a grillage model[J]. China Civil Engineering Journal, 2006, 39(12): 83-87.
10余岭, 陈鸿天, 罗绍湘. 用时域法和频时域法识别桥面移动车载[J]. 工程力学, 2001, 18(5): 100-107.
Yu Ling, Chen Hongtian, Luo Shaoxiang. Identification of moving vehicle loads on bridges using time domain method and frequency?time domain method[J]. Engineering Mechanics, 2001, 18(5): 100-107.
11Yu Y, Cai C S, Deng L. State?of?the?art review on bridge weigh?in?motion technology[J]. Advances in Structural Engineering, 2016, 19(9): 1514-1530.
12耿少波, 石雪飞, 阮欣. 基于桥梁结构的动态称重系统算法研究[J]. 石家庄铁道大学学报(自然科学版), 2011, 24(4): 40-44.
Geng Shaobo, Shi Xuefei, Ruan Xin. Algorithm analysis of bridge weigh?in?motion system based on bridge response[J]. Journal of Shijiazhuang Tiedao University (Natural Science), 2011, 24(4): 40-44.
13王宁波, 任伟新, 万华平. 基于动应变的桥梁动态称重及其优化算法[J]. 振动与冲击, 2013, 32(4): 116-120.
Wang Ningbo, Ren Weixin, Wan Huaping. Bridge weigh?in?motion and its optimization algorithm based on dynamic strain[J]. Journal of Vibration and Shock, 2013, 32(4): 116-120.
14Tikhonov A N, Arsenin V Y. Solutions of Ill?Posed Problems [M]. New York: V H Winston and Sons, 1977.
15Liu H, Luo Z, Yu L. A semi?convex function for both constant and time?varying moving force identification [J]. Mechanical Systems and Signal Processing, 2021, 146: 107062.
16Pan C, Liu H, Yu L. A sparse self?estimated sensor?network for reconstructing moving vehicle forces[J]. Smart Materials and Structure, 2019, 28(8): 085009.
17張梓航, 贺文宇, 任伟新. 基于双稀疏字典的动态荷载识别方法[C]. 第29届全国结构工程学术会议论文集(第II册), 2020: 333-337.
Zhang Zihang, He Wenyu, Ren Weixin. Dynamic load identification based on sparse dictionary[C]. Proceedings of the 29th National Conference on Structural Engineering (Volume II), 2020: 333-337.
18张龙威, 汪建群, 陈宁, 等. 桥梁动态称重迭代算法的理论与试验研究[J]. 振动与冲击, 2021, 40(6): 171-176.
Zhang Longwei, Wang Jianqun, Chen Ning, et al. Theoretical and experimental study on a bridge weigh?in?motion iterative algorithm[J]. Journal of Vibration and Shock, 2021, 40(6): 171-176.
19邓露, 李树征, 淡丹辉, 等. 桥梁动态称重技术在中小跨径混凝土梁桥上的适用性研究[J]. 湖南大学学报(自然科学版), 2020, 47(3): 89-96.
Deng Lu, Li Shuzheng, Dan Danhui, et al. Study on applicability of bridge weigh?in?motion technology in short- to medium?span concrete girder bridges[J]. Journal of Hunan University(Natural Sciences), 2020, 47(3): 89-96.
20宫亚峰, 宋加祥, 谭国金,等. 多车桥梁动态称重算法[J]. 吉林大学学报(工学版), 2021, 51(2): 583-596.
Gong Yafeng, Song Jiaxiang, Tan Guojin, et al. Multi?vehicle bridge weigh?in?motion algorithm[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(2): 583-596.
21Yu Y, Cai C S, Liu Y. Probabilistic vehicle weight estimation using physics?constrained generative adversarial network[J]. Computer?Aided Civil and Infrastructure Engineering, 2021, 36(6): 781-799.
22Yoshida I, Sekiya H, Mustafa S. Bayesian bridge weigh?in?motion and uncertainty estimation[J]. ASCE?ASME Journal of Risk and Uncertainty in Engineering Systems, Part A: Civil Engineering, 2021, 7(1): 04021001.
23Yang C. A novel uncertainty?oriented regularization method for load identification[J]. Mechanical Systems and Signal Processing, 2021, 158: 107774.
24Yuen K V. Recent developments of Bayesian model class selection and applications in civil engineering[J]. Structural Safety, 2010, 32(5): 338-346.
25龙驭球, 包世华, 匡文起. 结构力学教程(Ⅰ)[M]. 北京: 高等教育出版社, 2000.
Long Yuqiu, Bao Shihua, Kuang Wenqi. Course of Structural Mechanics(Ⅰ)[M]. Beijing: Higher Education Press, 2000.
26Mu H Q, Xu R R, Yuen K V. Seismic attenuation relationship with homogeneous and heterogeneous prediction?error variance models [J]. Earthquake Engineering and Engineering Vibration, 2014, 13(1): 1-11.
27中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 汽车、挂车及汽车列车外廓尺寸、轴荷及质量限值:GB 1589—2016[S]. 北京: 中国标准出版社, 2016.
General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China, Standardization Law of the People's Republic of China. Limits of dimensions, axle load and masses for motor vehicles, trailers and combination vehicles: GB 1589—2016[S]. Beijing: Standards Press of China, 2016.
28Beck J L, Katafygiotis L S. Updating models and their uncertainties I: Bayesian statistical framework[J]. Journal of Engineering Mechanics, 1998, 124(4): 455-461.
29Muto M. Application of stochastic simulation methods to system identification[D]. Pasadana: California Institute of Technology, 2007.
30Yuen K V. Bayesian Methods for Structural Dynamics and Civil Engineering[M]. New York: Wiley, 2010.
31OBrien E J, Quilligan M J, Karoumi R. Calculating an influence line from direct measurements[J]. Proceedings of the Institution of Civil Engineers, 2006, 159(1): 31-34.
32Wang Y D. Smoothing Splines Methods and Applications[M]. Boca Raton: CRC Press, 2011 .
Research on Bayesian method for identifying the vehicle loads on the bridge
MAO Jian?xiao 1 ?PANG Zhen?hao 1WANG Hao 1 ?WANG Fei?qiu 2
1. Key Laboratory of Concrete and Prestressed Concrete Structure of Ministry of Education, Southeast University, Nanjing 211189, China;
2. Jiangsu Engineering Co., Ltd. of China Railway 24th Bureau Group, Nanjing 210038, China
Abstract A novel method is proposed for identifying vehicle loads on bridges and selecting the error pattern based on Bayesian inference. Initially, the expression of the relationship between the vehicle loads and the measured responses is constructed using the static influence line. The modified coefficient surface is then established to eliminate the identification error caused by the dynamic effects. Afterwards, five error modes related to the structural responses and vehicle speed are introduced. According to the assumed prior distribution, the posterior distribution of vehicle axle loads is derived. On that basis, the optimal estimated value and confidence interval of vehicle loads can be obtained. Furthermore, the posterior probability of each error mode is calculated. Finally, the identification accuracy and reliability of the proposed method for scenarios under different vehicle speeds are validated by the numerical example of simply supported beam and the dynamic load test of a continuous beam bridge. The results show that the modified coefficient surface can effectively eliminate the vehicle dynamic impact and improve the accuracy of vehicle load identification. The result of vehicle load identification is presented in the form of confidence interval to quantify the uncertainty. Bayesian method can identify the optimal error pattern, which further improves the robustness of load identification.
Keywords vehicle load identification; Bayesian inference; uncertainty quantification; pattern selection; dynamic response elimination
猜你喜欢
商情(2016年46期)2017-03-06
现代营销·学苑版(2016年12期)2017-01-23
重庆大学学报(社会科学版)(2016年6期)2017-01-19
现代商贸工业(2016年14期)2016-12-27
会计之友(2016年21期)2016-12-14
人民论坛(2016年14期)2016-06-21
现代经济信息(2016年9期)2016-05-24
商场现代化(2016年10期)2016-05-13
科技与管理(2015年6期)2016-02-26