
在多种制式机场跑道异物探测系统中告警准确率的研究
2023-07-20 00:12王啸马向勇章林张佳静
无线互联科技 2023年9期
关键词:混合式
王啸 马向勇 章林 张佳静
摘要:随着对机场跑道外来物的重视程度越来越高和航班量的大幅增加,传统的人工巡查的方式已经不能完全满足机场高效运行的要求。目前,国内已有多个机场安装了机场跑道异物探测管理系统,其部署方式可分为边灯式、塔架式、边灯和塔架混合式等,但当前对系统和各个探测设备的准确率缺少有效的统计方法。在此基础上,文章提出了一种在多种制式机场跑道异物探测管理系统中的告警准确率统计计算方法。实践表明,该方法可以有效、准确、多维度地计算统计出各个探测设备、系统的告警准确率情况。
关键词:FOD;边灯式;塔架式;混合式;告警准确率
中图分类号:V19
文献标志码:A
0 引言
外来物(Foreign Object Debris,FOD)即可能损伤航空器或系统的某种外来的物质、碎屑或物体[1]。随着现在民用机场航班客运量的大幅增加,外来物掉落在机场的情况时有发生,任何在机场跑道飞行区内,可能会危及航空器地面安全运行的物体都属于外来物。典型的外来物有:混凝土、沥青碎块、金属零件、碎石子、橡胶轮子、塑料制品和动植物等。外来物对航空器的影响是巨大的,跑道上的外来物可能很容易被吸入发动机,导致发动机失效,或者被吸入一些别的机械装置,影响航空器的正常运行,导致航班延誤、中断起飞、关闭机场跑道、人员伤亡。因此,跑道上的外来物不仅会损害航空器,造成巨大的经济损失,还会夺去宝贵的生命。
为了减少FOD的影响,提高机场的运行效率,国内已有多个机场安装了机场跑道异物探测管理系统,其部署方式可分为边灯式、塔架式、边灯和塔架混合式、车载移动式等。
1 现状及存在的问题
目前,北京大兴机场3条跑道部署了边灯式探测器,一条跑道部署的塔架式探测器,成都天府机场、鄂州花湖机场都是部署的边灯式探测器。从设备的部署方式和业务处理流程的维度分析,可以把边灯式、塔架式、边灯和塔架混合式这3种制式的异物探测系统归入一个通用的系统组成架构和业务处理流程。
2 主流的异物探测系统
在实际的系统中,各个探测器探测能力的一致性、设备的校准、参数设置和设备本身等问题都可能会影响探测异物的能力,进而导致整个系统出现误警和漏警,其中漏警的影响是非常严重的。漏警会导致异物没有得到及时处理,影响航空器、人员的安全。由于FOD探测设备和探测系统刚在国内建设和使用,当前还没有对FOD探测设备和系统的漏警情况进行计算和统计分析的高效手段。因此,本文提出一种在边灯式、塔架式、边灯和塔架混合式、移动式这4种制式机场跑道异物探测系统中各个探测设备准确率的方法,能够自动统计出各个探测设备、整个系统的漏警情况,便于及时发现和处理有问题的探测设备。
2.1 边灯式异物探测系统
边灯式异物探测系统主要是把探测器安装在跑道的两边,依托毫米波雷达传感器和光学传感器对相应的跑道区域进行扫描探测,一般边灯式探测设备部署间隔为60~120 m。在边灯式探测系统中,一般先由雷达探测到目标,然后再进行取证拍照,在进行拍照取证的过程中,边灯式探测设备是不进行雷达探测工作的。
2.2 塔架式异物探测系统
塔架式异物探测系统的探测设备一般安装在离跑道150 m~200 m之外。正常的塔架式设备一般由塔架式雷达探测器和塔架式光电探测器两个设备组成。若在纯光学探测系统中,仅部署塔架式光电探测器。纯光学的探测系统仅依靠光学传感器对跑道区域进行周期性拍照扫描,然后对所有拍照的图像进行目标检测、识别工作。
2.3 边灯和塔架混合式探测系统
边灯式和塔机式探测设备大多是通过雷达探测发现目标,然后光学确认复核,或者通过纯光学检测发现。为了降低边灯的安装造价成本和维护时间成本,可以考虑在航空器起降的接地带等重点区域安装边灯式设备,以近距离地检测异物,同时保存相应的视频信息;在非重点区域按照600 m~1 000 m的间隔安装塔机式探测设备。
2.4 移动式异物探测系统
移动式异物探测系统就是把探测设备安装在车辆上面,在跑道停航阶段,可以把车辆开到跑道上进行工作。移动式异物探测系统在工作的过程中是一边开车移动,一边驱动探测设备进行检测,若检测到异物会立即通知工作人员现场核实处理[2]。
综上所述,上面4类机场跑道异物探测系统各有特点。其中,移动式异物探测系统的价格最低,但是其工作的过程中,需要关闭跑道,不能对做跑道进行全天时、全天候的检测。其他3类探测系统可以实时对跑道进行监控检测,第一时间发现异物。边灯式的设备需要安装在跑道边,其造价高,且每次维护都需要进入跑道,维护比较困难;塔架式设备造价稍低,但其受制于安装位置和高度限制。边灯和塔架混合式探测系统综合了边灯式和塔架式设备的优点,一般可以在接地带等重点区域部署边灯设备,在其他区域部署塔架式设备。
3 探测管理系统组成和处理流程
3.1 系统组成
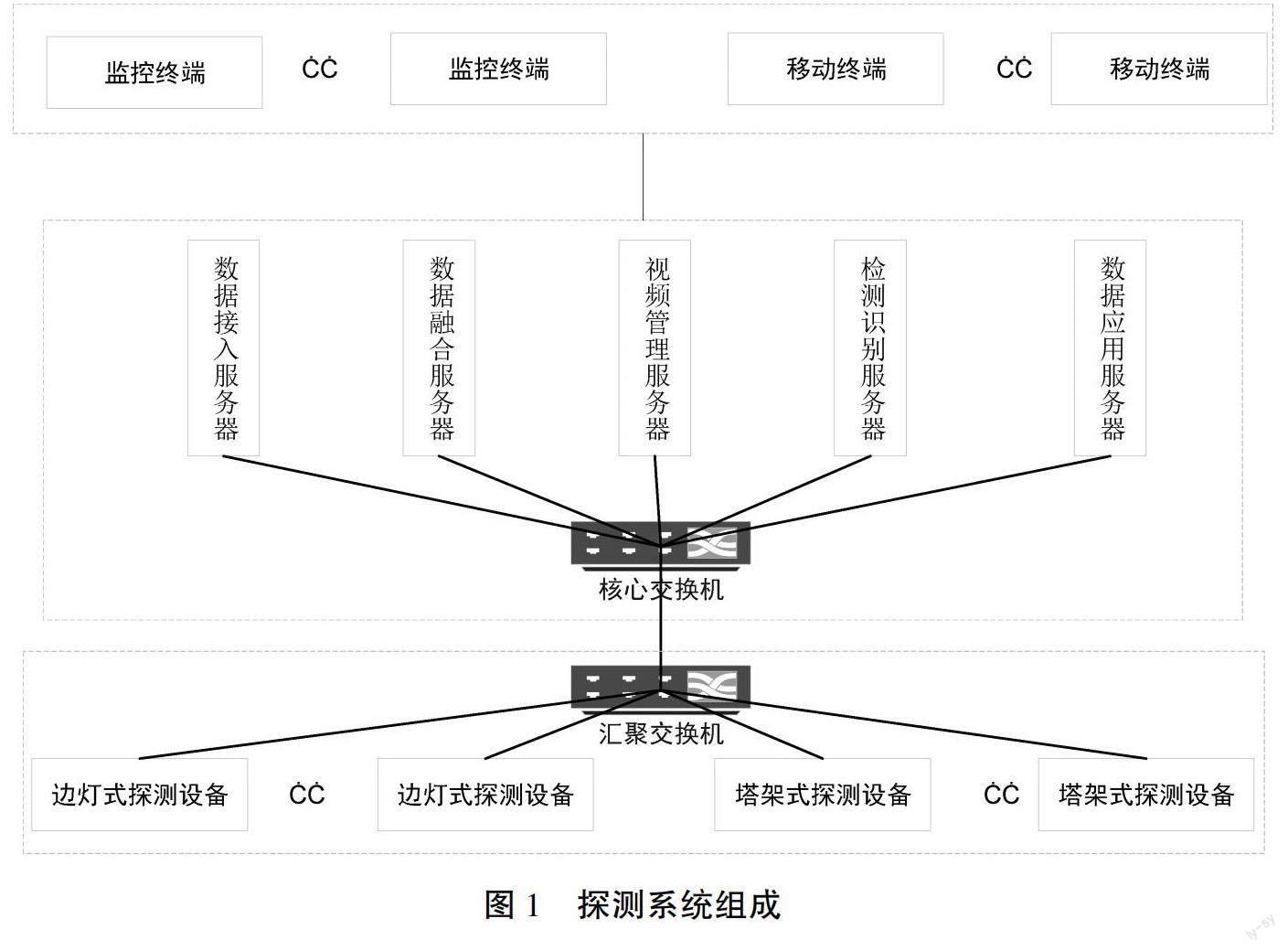
机场跑道探测管理系统一般由毫米波雷达、可见光摄像设备、交换机(包括汇聚交换机和核心交换机)、数据接入服务器、数据融合服务器、视频管理服务器、检测识别服务器、数据应用服务器、监控终端和移动终端等设备组成。毫米波雷达具备较高的距离、方位分辨率,同时穿透雾、烟、灰尘的能力较强,能够全天时、全天候地监测机场跑道,精确地探测到跑道上的微小异物[3]。机场跑道探测管理系统的组成如图 1所示。
其中,数据接入服务器具有连接雷达设备和可见光摄像设备、并管理连接设备的状态和接收连接设备的上报数据功能,其主要功能是接收并转发雷达(边灯式和塔架式)上报的检测异物目标信息。
数据融合服务器主要把数据接入服务器上报的检测目标信息进行融合处理,并驱动数据接入服务器调动相应的可见光摄像设备去拍照。在实际探测设备的部署环境中,可能会进行冗余安装部署,同一个检测区域可能会被两个或者两个以上探测设备探测,即一个异物目标会被多个探测设备检测到,数据中心接收到各个探测设备上报的异物目标数据后,结合目标尺寸和空间距离的属性信息进行匹配、融合处理,形成融合告警,便于用户查看和分析。
3.2 主要业务流程
机场跑道异物探测系统的业务流程主要包括异物探测、异物融合识别、异物报警、异物清理和数据管理。
3.2.1 异物探测
异物探测就是探测系统会全天时、全天候地对跑道的异物进行探测,包括使用雷达、光学等技术进行探测,并将探测结果传输到数据中心进行探测目标信息处理。
3.2.2 异物融合识别
异物融合识别就是将各个探测设备上报的异物目标信息进行融合,由于对同一个异物被多个探测设备探测到的目标信息进行融合,同时驱动相应的可见光设备进行取证拍照,并通过图像处理技术进行类别自动识别、计算异物的尺寸信息等,以便确定异物的告警等级、位置(一般会定位到道面的板块编号)等属性。
3.2.3 异物报警
异物报警就是当发现新的异物目标时,机场跑道异物探测系統会自动触发声光报警,并在系统的地图页面中显示异物所在的位置,通过多种方式提示用户及时确认和处理。
3.2.4 异物清理
异物清理就是用户根据探测管理系统的提示信息,把指定的异物信息通过移动终端下发给相应的清理工作人员。清理工作人员根据移动终端导航到异物所在的具体位置,进行异物清理工作。其中,一般移动终端是支持现场拍照取证的操作,系统可以对整个异物的处理流程进行全程记录[4]。
3.2.5 数据管理
数据管理就是整个系统会自动记录所有的探测结果和清理记录信息,可随时查询、分析数据,以便于用户对系统进行维护和工作的改进,并为日后的管理效率提升和决策提供数据支持。
4 异物告警准确率统计计算
4.1 部署模型构建
边灯式、塔架式、边灯和塔架混合式的探测管理系统都是基于实际的机场数据来建立机场跑道数据模型,可以通过专业的团队进行测绘,形成自己的GIS服务,或者根据公开的地图数据(比如:百度地图、谷歌地图等)和机场的CAD数据文件生成平面二维地图。
在部署现场采集边灯式、塔架式探测设备的实际经纬度坐标信息,构建探测设备部署数据模型,其坐标信息一般是基于世界大地测量系统坐标系(World Geodetic System-1984 Coordinate System,WGS84)。在系统运行过程中,各个探测设备定时周期性扫描,并上报异物目标数据,异物目标数据主要包括:目标尺寸、目标发现时间、距离、角度、探测设备ID等信息。系统通过异物目标相对于探测设备的距离和角度等信息,并结合探测设备当前的经纬度信息,就可以计算出异物目标的经纬度坐标信息,同时会把异物目标直观地显示在跑道的地图中。
4.2 准确率统计计算流程
4.2.1 确认异物告警
在系统的实际运行过程中,有两个途径可以确认FOD信息,分别为:探测管理系统发现,且人工确认为真实的FOD;探测管理系统未发现,通过人工巡查或者其他方式发现的FOD信息。在本文中需要把所有确认FOD的经纬度和发现时间信息录入系统。
4.2.2 查找关联设备
系统自动根据录入的确认FOD的经纬度和时间信息,并结合各个探测设备的探测能力等数据进行匹配,计算出每个FOD应归属的探测设备。计算确认的FOD同各个探测设备的距离d(单位为m)的计算公式如下:
d=111.12cos{1/[sin? Asin? B+cos? Acos? Bcos(λB-λA)]}
其中,λA和? A分别为FOD的经度、纬度;λB和? B分别为探测设备的经度、纬度;然后同系统部署中的探测设备探测能力半径进行比较,如果FOD同探测设备的距离小于探测设备的探测能力半径,就判定所述FOD的位置应归属的探测设备,否则就不归属。
在实际安装部署环境中,可能会进行冗余安装部署,所以可能会出现一个确认的FOD会在多个探测设备的探测能力范围内,即应该被多个探测设备探测到。系统会对确认的FOD在其探测能力范围内,但未发现该FOD的探测设备的漏警次数加1。另外,若一个确认的FOD没有被任何一个探测设备检测到,则认为系统出现一次漏警。
4.2.3 准确率统计分析
机场跑道探测管理系统可以根据相应周期的策略(可以按日、周、月、半年、年、跑道和整个系统)进行多维度的统计分析,形成相应的探测设备、跑道和系统的漏警数据报表,可以支持用户通过饼图、柱状图或者曲线图等多种方式查看和分析。
5 结语
本文设计出一种能够同时满足边灯式、塔架式、边灯和塔架混合式多种制式机场跑道异物探测管理系统架构和业务流程,并提出了一种在这3类制式机场跑道异物探测系统中的告警准确率统计计算方法。该系统架构和告警准确率的计算方法已经在淮安机场运行近两年,实践表明该方法可以有效、准确、多维度地计算出各个探测设备、系统的告警准确率情况。该方法可以及时发现有问题的设备,便于及时处理,降低系统的漏检率,提高系统维护人员的工作效率,为提高机场跑道运行效率提供有效的保证。
参考文献
[1]国家民航总局机场司民航局安全技术中心.FOD防范手册[EB/OL].(2009-03-31)[2023-05-21].https://www.docin.com/p-64463281.html.
[2]王瑾.一種混合制式机场跑道异物探测系统[J].科技视界,2019(9):16-18.
[3]王宏哲.用于机场场面目标监视的高分辨FMCW[J].现代雷达,2010(7):21-23.
[4]李莎,李春娟.机场跑道异物检测系统设计与算法研究[J].现代雷达,2021(43):80-84.
(编辑 王雪芬)
Research on alarm accuracy in multiple standard airport runway foreign object detection systemWang Xiao1, Ma Xiangyong1, Zhang Lin1, Zhang Jiajing2
(1.Nanjing LES Electronic Equipment Co., Ltd., Nanjing 210000, China;
2.Nanjing LES Information Technology Co., Ltd., Nanjing 210000, China)
Abstract: With more and more attention to foreign object debris and a large increase in the number of flights, the traditional manual inspection has been unable to fully meet the requirements of efficient operation of the airport. At present, many domestic airports have installed detection management system, which can be divided into edge-light type, tower type, hybrid detection. But at present, there is a lack of effective statistical methods for the accuracy of the system and each detection device. On this basis, this paper presents a statistical calculation method of alarm accuracy in multiple standard airport runway foreign object detection management system. Finally, the actual results show that this method can calculate and calculate the alarm accuracy of each detection device and system effectively, accurately and multidimensional.
Key words: FOD; edge-light type detection system; tower type detection system; hybrid detection system; alarm accuracy
猜你喜欢
商情(2016年44期)2017-03-05
中学课程辅导·教师教育(中)(2016年12期)2017-02-22
教学研究(2015年5期)2015-10-26
