基于鹈鹕优化算法的核环境巡检机器人路径规划
2023-09-18 14:44张洁
机械设计与研究 2023年3期
张 洁
(郑州旅游职业学院 信息工程学院,郑州 451464, E-mail: zhangjie_zj12345@163.com)
核环境下的常态巡检工作对于发现问题、避免事故十分重要,但目前巡检工作主要依靠人工完成,而人工巡检却存在着诸多弊端[1]。因此,从提高巡检效率和降低人体损伤等方法考虑,通过机器人对核环境进行巡检,是一项重要的研究内容。对于巡检机器人而言,智能合理的规划出移动路径是其完成巡检工作的先决条件,是其关键技术之一[2-3]。
关于机器人路径规划的研究,目前可分为传统方法和智能方法。人工势场法[4-5]、A*算法[6-7]等方法就是传统方法的典型代表,但它们的运算效率相对偏低。智能方法主要是将机器人路径规划问题转化为最优化问题后,利用智能优化算法对最优化问题进行求解,从而得到路径规划结果,在运算效率、规划结果上相对更优,越来越受到重视。如一些学者相继提出的改进烟花算法[8]、改进蝗虫优化算法[9]、改进天牛须搜索算法[10]、改进蚁群算法[11]等,都在机器人路径规划中得到了应用,在缩短机器人移动路径、减少计算耗时等方法,得到了不错的效果。从目前的研究结果看,基于智能优化算法的机器人路径规划已成为一种重要方法。
Pavel等人[12]通过模拟鹈鹕在狩猎过程中的自然行为,于2022年提出了鹈鹕优化算法(Pelican Optimization Algorithm, POA),在基准测试函数中展现出了极强的优化性能,较8种典型智能优化算法的性能有了明显的提升。目前,关于该算法的进一步研究,以及其在一些工程实际的应用还未有相关报道。
本文为提高核环境巡检机器人路径规划的效果,在对POA算法进行研究和性能验证的基础上,首次将其应用于机器人路径规划实例中,结果表明:POA算法性能优异,可有效应用于机器人路径规划中,在耗时更少的情况下,可以获得更短的移动路径。
1 问题建模


▲图1 10×10栅格地图

▲图2 8个移动方向
2 鹈鹕优化算法
在POA算法中,通过模拟了鹈鹕在狩猎时的行为和策略,以此来更新候选解。该狩猎过程分为两个阶段:逼近猎物(勘探阶段),水面飞行(开发阶段)。
(1) 初始化
在进行狩猎前,需要对鹈鹕种群进行初始化,其数学模型如下:
xij=lj+rand·(uj-lj)
(1)
其中:xij为第i(i=1,2,…,N,N为鹈鹕的种群数)只鹈鹕在第j(j=1,2,…,m,m为待求优化问题的维数)维空间中的位置;rand是[0,1]范围内的随机数;uj和lj分别维待优化问题在第j维的上边界和下边界。这样,就可以将鹈鹕种群位置矩阵表示为:
(2)
其中:Xi为第i只鹈鹕所在位置;X为鹈鹕种群位置矩阵。进而,鹈鹕种群的适应度值矩阵可表示为:
(3)
其中:Fi为第i只鹈鹕所在位置的适应度值;F为鹈鹕种群的适应度值矩阵。
(2) 勘探阶段
在完成种群的初始化后,就进行算法的第一阶段,即勘探阶段。在此阶段,鹈鹕确定猎物的位置后,向这一确定的区域移动。其中,猎物的位置为随机确定的,这样就可以保证对整个搜索空间进行扫描,从而实现种群对不同区域的勘探能力。鹈鹕种群向猎物移动的方式为:
(4)

鹈鹕种群向猎物移动后,如果移动到的新位置适应度值较移动前更优,则移动是有效的,称之为有效更新,此时鹈鹕就以移动到的新位置为当前所处位置,反之,则停留在原处,即:
(5)

(3) 开发阶段
在完成第一阶段后,就进入算法第二阶段,即开发阶段。在此阶段,鹈鹕贴近水面抓捕猎物,使得鹈鹕可以在攻击区域内抓捕更多的猎物,保证对局部区域的精细搜索和开发能力。此阶段中,鹈鹕抓捕猎物的方式为:
(6)

同勘探阶段类型,在开发阶段中,有效更新同样适用,即
(7)

结合初始化、勘探阶段、开发阶段等过程,可得POA算法的主要流程如图3所示。
3 鹈鹕优化算法性能测试
本文采取表1所示的4个基准测试函数对POA算法的性能进行测试,其中,测试函数Sphere和Schwefel为单峰函数,可测试算法的精度和速度;测试函数Rastrigin和Griewank为多峰函数,可测试算法的全局寻优能力。同时,将POA与近几年提出且在文献[12]中未纳入对比的3种智能优化算法进行对比分析,3种智能优化算法分别为:麻雀搜索算法(Sparrow Search Algorithm, SSA)、蝴蝶搜索算法(Butterfly Optimization Algorithm, BOA)、蝗虫优化算法(Grasshopper Optimization Algorithm, GOA)。上述参与对比的几种方法中,最大迭代次数T设置为1 000,种群规模N设置为30,其余主要参数设置如表2所示。

表1 测试函数

表2 参数设置
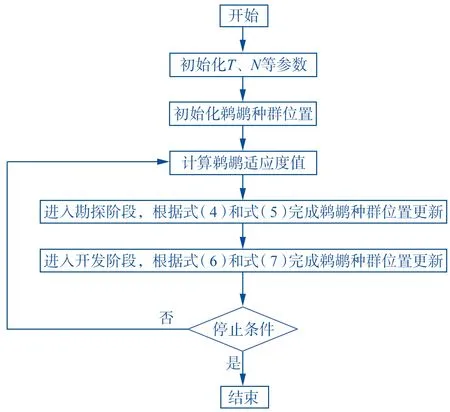
▲图3 POA算法流程图
利用4种方法对表1所示函数进行求解,每种算法对每一个函数均独立运行30次,得到统计结果如表3所示。从表3中可知,无论是对于2个单峰函数,还是2个多峰函数,参与对比的4种方法中,在最优值、平均值和标准差这3个指标上,均是POA算法获得的结果更优。表3的结果表明,4种优化算法中,POA算法的寻优精度更高、计算稳定性更好。
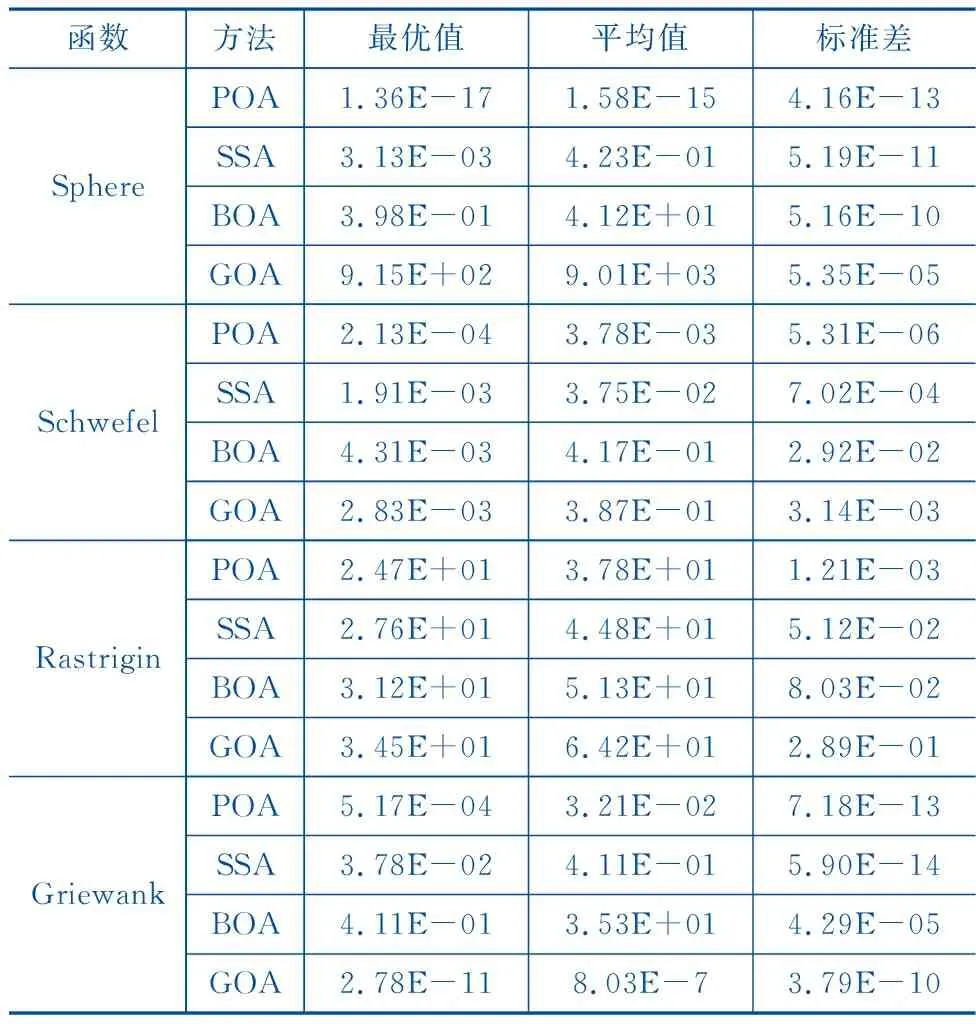
表3 计算结果
4 路径规划实例分析
4.1 测试实例
为验证POA算法在核环境巡检机器人路径规划中的有效性,在MATLAB环境中构建地图模型进行路径规划实例分析。在本文中,构建了20×20栅格地图和40×40栅格地图,分别用于模拟简单巡检环境和复杂巡检环境,构建的两种栅格地图如图4所示。同时,为了验证POA算法在路径规划中的优势,还将其与SSA、BOA和GOA等算法进行对比,相关算法的种群规模设置为40,最大迭代次数设置为100,其余参数的设置同表2。

▲图4 不同环境地图
4.2 简单环境分析
利用POA、SSA、BOA和GOA这4种算法分别在简单环境下进行路径规划,每种算法独立计算20次,相关结算结果统计如表4所示。其中,平均值为20次计算所得路径的平均值;平均耗时为20次计算耗时的平均值;20次计算所得最短路径的可视化结果如图5所示,得到最短路径的迭代过程如图6所示。

表4 简单环境计算结果

▲图5 可视化结果(简单环境)

▲图6 迭代曲线(简单环境)
从表4中可知,对于最短路径,POA算法得到的路径最短为28.04,较SSA和BOA缩短2.04%,较GOA缩短5.12%;对于路径平均值,POA算法是4种方法中最少的,这说明在20次计算中大部分计算次数都是POA算法规划得到的路径最短;对于标准差,POA算法得到的结果最小,这说明其计算稳定性较其余3种方法更好;对于平均耗时,POA算法和BOA算法基本相当(POA耗时约少3 s),相较SSA和GOA减小相对更为明显,特别是相比于GOA减少幅度很大。
从图5中可知,POA和SSA算法得到的移动路径拐点为4个,BOA和GOA算法的移动路径拐点为5个,BOA和SSA的移动路径更为平滑,结合表4中最短路径结果,POA获得的路径更短且更平滑;从图6中可知,POA在第10次迭代时,就搜索到了最短路径,而SSA、BOA和GOA则分别需要16、25、32次,这说明POA可以更短的耗时搜索到最优移动路径。
4.3 复杂环境分析
利用POA、SSA、BOA和GOA这4种算法分别在复杂环境下进行路径规划,每种算法独立计算20次,相关结算结果统计如表5所示,表5中所得最短路径的可视化结果如图7所示、迭代过程如图8所示。

表5 复杂环境计算结果
从表5中可知,对于最短路径和平均路径,POA算法得到的结果均是4种方法中最短的,最短路径较SSA缩短约1.02%,较BOA和BOA缩短4%;对于标准差,POA算法得到的结果同样是4种方法中最小的;对于平均耗时,在复杂环境下,3种方法与POA之前的差距逐渐增大,POA的计算效率得到了更好的体现。

▲图7 可视化结果(复杂环境)

▲图8 迭代曲线(复杂环境)
从图7中可知,复杂环境下障碍物增多,POA和SSA所得路径的拐点仍为4个,而BOA和GOA的拐点则为6个,结合表5中最短路径结果,POA获得的路径更短且更平滑。从图8中可知,POA搜索到最短路径所需要的迭代次数同样是4种方法中最少的,只需要16次迭代,而SSA、BOA和GOA则分别需要20、30、34次。
4 结论
为提高核环境巡检机器人路径规划效果,在利用4个基准测试函数验证POA算法性能的基础上,将其应用于路径规划实例中,得到如下结论:
(1) 基准测试函数验证结果表明了POA算法具有很强的寻优性能和计算稳定性;
(2) 路径规划实例结果表明了POA算法可以获得更短的移动路径且计算稳定性强,较SSA、BOA和GOA等算法更具优势;
(3) 鉴于POA算法性能突出,后续可加大其在更多优化问题中的应用。
猜你喜欢
今日农业(2022年15期)2022-09-20
小哥白尼(野生动物)(2021年8期)2021-11-22
小哥白尼(野生动物)(2018年12期)2018-12-18
红土地(2018年7期)2018-09-26
小哥白尼(野生动物)(2018年3期)2018-06-15
物联网技术(2017年5期)2017-06-03
上海理工大学学报(2016年2期)2016-06-02
陕西理工大学学报(自然科学版)(2015年6期)2016-01-25
江苏高职教育(2014年2期)2014-07-16
当代畜禽养殖业(2014年10期)2014-02-27