波动鳍水陆两栖机器人的设计与运动性能评估
2023-09-18 14:18李亚鑫
机械设计与研究 2023年3期
李亚鑫, 杜 亮, 王 宇, 杨 淼
(西南石油大学 电气信息学院,成都 610500,E-mail: liyaxin@swpu.edu.cn)
两栖动物在水陆及其交接过渡地带活动,对复杂多变的环境具有较强的适应能力。与多数只能在单一环境下活动的机器人不同[1-2],以两栖动物为原型研制的水陆两栖机器人通常需借助不同的动力源用以实现水下、陆地两种运动模式,从而为生态环境监测、资源勘探、沿海区域军事防御等任务提供移动式硬件平台[3]。
为了提高两栖机器人的运动灵活性与机动性,国内外众多学者在采用仿生式设计思想的基础上,相继提出了一系列复合驱动型的机器人样机[4-5]。东京工业大学的广濑教授基于半仿生推进设计理念,研制了一款水陆两栖蛇形机器人ACM-R5[6-7]。该机器人由9个防水模块通过2自由度关节连接而成。每个关节外侧由于安装了被动轮,机器人在陆地可通过摆动加滚动的方式实现蜿蜒运动;此外,关节上还集成了摆动“鳍”,可起到“桨”的划水作用,保障其在水下自由游动。类似轮-鳍复合驱动的方式还有北京理工大学杨毅教授团队研发的蛙型水陆两栖机器FroBot[8-9]。通过周期性地摆动机器人两后足,其足底安装的万向轮可使机器人在平坦路面具有较快的移动速度。基于蛙类在水下的运动模式,机器人两后足配置了尾鳍可模拟青蛙的脚蹼,通过往复摆动尾鳍驱动机器人在水下运行。但面对崎岖、复杂的陆地环境,以上两类机器人在地形适应性方面将遇到较大挑战。相较之下,腿式机器人由于运动肢具备多自由度,目前也是水陆两栖机器人发展的重要方向。其中,中国科学技术大学张世武教授团队提出的六足水陆两栖机器人AmphiHex-Ⅱ采用可变刚度的腿-鳍复合结构[10],在陆地上利用电机驱动扇形腿移动,其简单的水陆切换方式,也使集成在腿部的柔性鳍可轻松推动机器人在水下实现多自由运动。这款腿-鳍复合式推进结构由于具备刚度可调的特性,大大增强了机器人适应多变环境的能力。同样受节肢动物腿部生理特征的启发,一款“轮-腿-矢量喷水”复合驱动的四足两栖球型机器人也由北京信息科技大学研制而成[11]。该机器人不仅融合了轮式机器人在平坦路面移动的快速性与腿式机器人对复杂地形的适应性,还通过为每条运动肢添加喷水电机,最大限度地保障了机器人在水下运动的灵活性。
综上所述,水陆两栖机器人的推进结构设计大多采用不同动力源相叠加的方式,即在面向单一环境的驱动机构基础上附加额外推进装置,这将导致水陆两栖机器人的推进器不仅机械结构复杂而且控制难度较大。因此,本文采用半仿生式的推进器设计思路,提出了一款基于波动鳍驱动的水陆两栖机器人。波动鳍推进方式通常被用于驱动水下仿生机器人运动,比如FESTO公司研发的BionicFinWave[12]、中科院自动化所研发的RobCutt系列[13]、希腊克里特教育技术学院研发的SQUIDBOT系列[14]等。由于这类机器人鳍面多选用刚度较低的硅胶,若直接用于驱动机器人很难支撑机体重量实现陆地运动。因此,本文从鳍面材料出发,在水陆两种环境下利用实验分析不同鳍面材料属性对推进器性能的影响,最终开发了一款适应水陆两栖环境的波动鳍机器人。只需搭载一套推进装置,该机器人即可同时兼顾水下、陆地两种运动模式,保障其运动灵活性的同时大大降低了机械设计和控制的复杂性。
1 水陆两栖机器人样机设计
1.1 机械设计
通过观察鳐科鱼类的生理特征,不难发现其游动的推进力主要来源于身侧一对宽大且能柔性运动的胸鳍。该胸鳍由数百根软骨支撑,通过胸鳍肌肉组织连接在一起构成柔性鳍面。在中枢神经系统的控制下,胸鳍软骨将有节律地上下摆动,从而带动鳍面波动。此时,鳍面形成的柔性波将推动周围流体使机器人获取前进动力。本文提出的水陆两栖机器人即采用了这种波动鳍推进方式,通过选择合适的鳍面材料并配置关键的推进器运动模型参数,该推进方式可使机器人完成水陆两种环境下的多自由度运动。
为模拟水下游动鳐鱼的外形,机器人样机设计如图1所示。整机呈扁平状,波动鳍推进器分布在机体两侧。综合考虑鳐鱼波动鳍的生理特征与机械实现的局限性后,本文在机身两侧的铝合金固定基座为推进器安装了18个防水舵机,通过独立驱动方式控制鳍条周期性地往复摆动,从而牵动鳍面产生柔性波,模拟鳐鱼胸鳍的节律性运动。与BionicFinWave这类采用电机联动机身两侧曲柄的方式不同,单鳍条独立驱动方式可灵活调整波动鳍的运动参数,从而便于切换水陆运动模式。在选择鳍面材料方面,被鳍条带动的鳍面一方面要产生连续的柔性波推动机器人在水下游动,另一方又需要具备一定硬度用于支撑机体保障其陆地运行。因此,本文采用了杨氏模量较大的丁腈橡胶并将其设计成扇形用以模拟鳍面的柔性波动。如图2所示,因为扇形鳍面内外弧长不同,当鳍条垂直于舵机安装基座并以此为基准固定鳍面时,丁腈橡胶由于具有一定柔性将在鳍条的约束下自然卷曲成平滑的曲面。配合鳍条周期性地上下摆动,柔性鳍面将产生连续的正弦波,进而在水动力或摩擦力的推动下使机器人完成水陆两栖运动。

▲图2 波动鳍柔性鳍面
在装配样机时,考虑到推进器需要在陆地上承受机体重量,因此本文采用高性能尼龙材料3D打印了机器人机身与鳍条。轻量化的机身不仅减轻了机器人陆地运行时舵机需要承担的负荷,还保障其在水下具有良好的耐压性。此外,由于鳍条也需要具备一定硬度用于带动柔性鳍面波动产生推力,本文选择了相同的3D打印材料。表1汇总了机器人样机各项关键设计参数。

表1 机器人样机设计参数
1.2 电气电路设计
为便于实现两栖机器人的运动控制,密封于机体内部的电气电路如图3所示。机器人主控板采用Stm32f103zet6,并通过串口通信连接舵机驱动板(LSC-24),分别控制18路防水舵机(HS-5086WP, Hitec)驱动鳍条节律性摆动。考虑到机器人续航能力,机身内置了一块2 200 mAh的锂电池,可维持机器人在额定功率下连续工作一小时,并且该机器人机盖还预留了充电口,方便机体在密封防水的前提下进行续航能量补给。通过在样机内部搭载9轴陀螺仪(MPU9250)与压力传感器(MS5837-30BA),机器人可在水下与陆地实现多自由度自主运动控制。

▲图3 电气电路设计模块图
此外,密封机舱内还配置了遥控接收器与程序调试器,这很大程度上方便了后续对机器人运动控制程序的在线调试。
2 波动鳍推进方式的运动模式规划
基于上文的机械设计,搭载波动鳍的两栖机器人可通过一套推进器实现水陆两种环境下的运动,因此这种灵活的仿生结构将大大降低运动模式规划的复杂性。
2.1 推进器关键参数选定
根据波动鳍运动的推进原理,鳍面上连续传递的柔性波是在鳍条周期性地摆动下形成的,因此,任何一根鳍条i的节律性运动均可用其偏离水平面的夹角θi表示为:
θi(t)=Asin[2πft+(i-1)φ0]+θB
(1)
如图4所示,A表示鳍条摆动的最大幅角(以偏离水平面θB的中性面为基准),f和φ0反应了鳍条运动的频率以及相邻鳍条之间的相位差。
为了保障鳍面生成的连续行波具有较好的平滑度,相邻鳍条之间的相位差φ0不宜超过90°。同时,机器人需借助鳍面在地面接触点产生的摩擦力实现陆地运动,因此,其两侧推进器的鳍面必须产生两个完整的正弦波(w=2)以保障机身在任意时刻都处于稳定状态。基于以上要求,波动鳍鳍条个数N需要满足如下方程:

▲图4 波动鳍鳍条的运动分析
(2)
上式解释了单侧推进器鳍条设为9条的根本原因。
依据鳍条运动模型不难发现,推进器产生的推力在很大程度上取决于鳍条摆动的幅角A与频率f。本文选择利用鳍条摆动频率来控制推进器推力,其主要原因在于柔性鳍面的杨氏模量较大。若鳍条摆动幅角选择不合适则很容易拉伸鳍面,导致驱动鳍条运动的舵机超负荷工作。因此,根据相邻鳍条之间幅角差呈周期性的关系:
(3)

2.2 运动模式规划
综合以上波动鳍推进器的关键参数选定原则,下面将依据鳍条运动模型的具体形式,规划机器人在水陆环境下实现多自由度运动时的各种姿态。
机器人在水下游动时,为了保障自身的平稳性,推进器鳍面需要产生一个完整的正弦波(w=1),用以平衡机身上下的波动。因此鳍条的运动参数可配置为:
θi(t)=26°sin[2πft±(i-1)45°]+θB
(4)
波动鳍相邻鳍条在该相位差(φ0=45°)下,鳍面将产生连续且平滑的正弦波,从而有助于提升推进效率。当鳍条依照公式4的运动模式上下摆动时,鳍面形成的柔性波将推动周围流体,使机器人获得与正弦波传播方向相反的推力FP且平行于机身,如图4所示。与此同时鳍条的周期性运动也将在摆动中性面产生垂直于机身的力FN。如图5(a)所示,当θB=0即推进器在水平面波动时,通过为左右两侧的波动鳍鳍条配置相同的摆动频率,推力FP将驱动机器人前行。此时,机身两侧的FN也在水平面相互抵消。同理,当机身一侧推进器改变鳍面正弦波传播的方向,如图5(b)所示,左右两侧相反推力FP将相对于机身质心产生转矩,从而驱动其原地旋转。若θB≠0即推进器波动的中性面偏离水平面时,如图5(c)和(d)所示,此时FN在垂直方向将存在分力,进而调整机身的俯仰角,驱动机器人上浮或下潜。
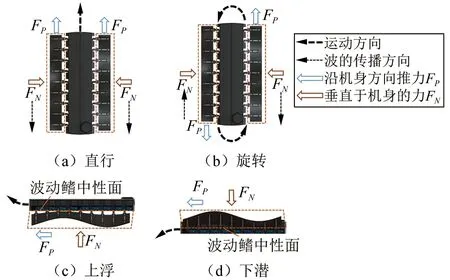
▲图5 机器人水下运动姿态
机器人在陆地运行时,由于波动鳍需要支撑机体重量,因此机身每侧鳍面需要至少产生两个完整的正弦波,即任意时刻都可保障鳍面与地面有四个接触点。为满足此要求,配置相邻鳍条相位差φ0=90°时,鳍条运动模型表示为:
θi(t)=14°sin[2πft±(i-1)90°]+θB
(5)

▲图6 机器人陆地运动姿态
如图6所示,波动鳍中性面偏离水平面的角度θB将使FN起到鳍面对机身稳定支撑的作用。通过控制推进器鳍面正弦波的传播方向,机身左右两侧波动鳍产生的推力FP可使机器人轻松实现前进、倒退、原地旋转等运动。
3 波动鳍推进器的性能评估
针对两栖机器人对波动鳍推进器水下及陆地运动模式提出的不同需求,不难发现鳍面材料特性对机器人运动性能至关重要。因此,本文一方面选取了水下波动鳍鳍面的常规材料硅胶与丁腈橡胶作对比;另一方面,考虑到鳍面需要具有一定支撑力,本文分别准备了2 mm和3 mm厚度的硅胶和丁腈橡胶用以模拟不同刚度的鳍面,其相关材料特性见表2。基于图7所示的测力装置,本章重点分析推进器采用不同材料属性鳍面时,其水下和陆地产生推力以及消耗功率的情况。

表2 不同鳍面的材料特性
如图7所示,该测力装置由长宽高为1 200 mm×500 mm×800 mm的铝合金支架搭建,一对波动鳍推进器通过一根连杆固定于高度可自由调节的光滑导轨上。实验中,本文基于上文建立的运动模型,通过控制鳍条摆动频率来测量推进器产生的推力以及驱动舵机消耗的总功率。每组实验重复五次,从压力传感器(JLBS-M2,量程为10 N)以及功率检测模块(ZK-J5X,量程为160 w)采集到的力与功率数据,将实时传输至PC机端进行后续数据处理。

▲图7 推进器测力装置
波动鳍水下性能测试实验中,推进器完全浸没于长宽深为850 mm×550 mm×500 mm的水箱中。鳍面材料分别配置了不同刚度,图8汇总了鳍条摆动频率与推进器产生的平均推力、功率消耗之间的关系。随着鳍条摆动频率增大,鳍面上柔性波传播速度加快,进而借由周围流体水动力产生的推力也增强,舵机驱动鳍条运动的总能量开销也增大。对比不同类型的鳍面,在功率差异不大的前提下,明显3 mm厚度的丁腈橡胶产生的推力更大。因此,就水下推进性能而言,3 mm厚度的丁腈橡胶更适合作为鳍面的首选材料。

▲图8 波动鳍水下推进性能与鳍面材料、鳍条摆动频率的关系
与水下实验相对照,图9展示了波动鳍在光滑陆地上产生的平均推力与功率开销随鳍条摆动频率之间的关系。实验考虑到驱动鳍条运动的舵机有机械位置极限,将鳍条摆动中性面与水平面夹角设置为θB=54°,由FN力分解可知,其可用于平衡机身重量。丁腈橡胶相较于硅胶杨氏模量较大,因此不仅具备足够的刚度用于产生FN支撑机身,而且在波传播方向形成的推力也远远大于硅胶鳍面。与此同时,3 mm厚度硅胶制成的鳍面,其陆地运动性能远远弱于相同厚度的丁腈橡胶,特别是在功率开销差异允许的情况下,3 mm厚度丁腈橡胶在陆地上产生的推力远远大于硅胶。综合以上实验数据,鳍面材料选取3 mm厚度丁腈橡胶更适合将波动鳍应用于水陆两栖环境。

▲图9 波动鳍陆地运动性能与鳍面材料、鳍条摆动频率的关系
4 两栖机器人样机运动性能评估
本文组装搭建的水陆两栖机器人样机如图10所示。为了评估搭载波动鳍的两栖机器人运动性能,实验过程以第二章两栖运动模式为基础,分别测试了该机器人在水下与陆地实现多自由度运动的各项性能。
4.1 水下实验
为了验证机器人在水下运动的灵活性与机动性,本文在户外小型泳池(长宽深:4 000 mm×1 500 mm×850 mm)内进行了包括直行、原地旋转、上浮下潜在内的水下实验。考虑到泳池空间有限,机器人在游动过程中产生的水波经池壁反射势必会影响运动。因此,本文通过机身内部搭载的陀螺仪感知位姿,采用PID控制算法调整左右侧鳍条摆动频率的方式,控制机器人在平面运动的偏航角,从而探究其直行与原地旋转的运动性能。

▲图10 波动鳍水陆两栖机器人样机
当鳍条的驱动舵机在额定频率2.4 Hz下工作时,如图11所示,机器人在泳池内以池底标尺为基准,可轻松实现前进运动。若使机身两侧波动鳍产生的柔性波反向传播,机器人即可完成后退运动。与此同时,本文通过改变波动鳍鳍条摆动频率,且每组实验重复5次,记录下机器人在不同频率下直行运动的平均速度与其平均偏航误差。如图12所示,机器人在水下直线航行速度与波动鳍鳍条摆动频率呈正比关系,最大航行速度可达160 mm/s,且最大偏航角不超过2°。
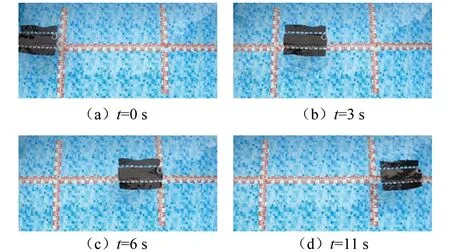
▲图11 机器人水下直行实验展示

▲图12 机器人水下直行的运动性能
当改变机器人单侧推进器上柔性波传播方向时,机身在两侧推进器反向推力作用下可实现原地旋转运动。图13(a)汇总了机身原地旋转时平均角速度与波动鳍鳍条摆动频率之间的关系。随着频率增大,波动鳍产生的推力增大进而带动机身旋转的角速度增大。从偏航角控制误差来观察,平均值不超过1°,其控制准确性较高。图13(b)则展示了2.4 Hz频率下机器人先后旋转至90°、180°机身偏航角的动态响应。偏航角在PID控制下虽然会产生了一定超调(不超过5.7%),但其响应速度较快,且稳态可以准确跟随设定值。

▲图13 机器人水下原地旋转的运动性能
根据机器人水下运动姿态规划,当波动鳍中性面与水平面重合时,机器人可通过改变鳍条摆动频率控制机身在平面内运动。若需要调节机器人纵向深度时,中性面与水平面夹角θB就成为关键运动参数。图14展示了θB分别为15°、30°、45°,机器人实现上浮与下潜时其质心距离水平面垂直深度随时间变化的关系。显然,鳍条摆动的中性面与水平面夹角越大,机器人上浮和下潜的速度越快,其最大速度在θB=45°、f=2.4 Hz时可达40 mm/s和46 mm/s。基于此实验数据,可将θB=45°设置为参考值,从而保障驱动鳍条摆动的舵机有一定运动裕量。此外,由于机器人内部搭载了压力传感器,本文在其上浮、下潜运动时同样采用了PID控制算法实现深度闭环控制,且控制精度良好。
4.2 陆地实验
根据波动鳍在陆地驱动机器人的运动模型,本节重点评估机器人样机的陆地运动性能。图15展示了机器人分别在瓷砖地面、塑胶跑道、沥青路面和沙地的行进过程。实验结果表明当波动鳍鳍面材料和运动参数配置合理时,其可提供足够动力驱动机器人在不同类型路面上移动。当机器人运动参数配置相同(θB=54°,f=2.4 Hz),在上述四种路面上分别重复5组实验,图16(a)汇总了其直线运动时机身平均前进位移与时间的关系。瓷砖地面由于光滑程度较高,波动鳍鳍面产生的柔性波在传播过程中所受摩擦力较小,因此机器人移动速度较快,可达15.4 mm/s。相反,松软的沙地会对波动鳍的陆地运动影响较大,阻碍鳍面上柔性波的传播,导致机器人在沙地移动过程中速度较小。

▲图14 机器人水下上浮、下潜的运动性能

▲图15 机器人分别在瓷砖地面、塑胶跑道、沥青路面和沙地的行进过程
此外,通过改变机器人一侧推进器上行波传播方向,机器人在陆地可同样实现转弯。图16(b)展示了机器人在光滑地面上转向90°后继续直线前行的运动性能。由机身质心位置可知,机器人旋转过程近乎在原地进行,较小的旋转半径验证了机器人运动的灵活性。当机器人直线运动时,其机身横向和纵向波动非常小,这也证明机器人在陆地运动具有较好的平稳性。

▲图16 机器人陆地运动实验
5 结论
为了降低两栖机器人推进器设计的机械复杂性,本文基于鳐科鱼类游动的运动特征,采用半仿生式设计思路研发了一款波动鳍推进的水陆两栖机器人。通过为该推进器规划运动模式以及配置合理运动参数,该机器人在波动鳍驱动下可轻松实现水下与陆地的多自由度运动并且模式切换简单。对比PES研发的有缆式波动鳍两栖机器人Velox[15],本文提出的机器人不需要通过电缆供电,因此大大降低了电缆被环境中水草或其他未知物体缠绕的风险。考虑到机器人需依靠携带的电池供电,本文一方面通过机械设计使机身结构轻便、紧凑;另一方面在参考推进器功率开销的前提下,通过实验为波动鳍选取合适的鳍面。最终,本文选定将3 mm厚度的丁腈橡胶作为推进器鳍面材料,并基于此搭建了机器人样机。实验部分测试了该样机在水下、陆地的运动性能。在波动鳍驱动下样机不仅可完成直行、原地旋转、上浮下潜等水下运动,而且其对不同类型路面也具有较好的适应性。样机在两栖环境下的运动性能评估实验证明了该机器人具有较好的灵活性与机动性。
猜你喜欢
大科技·百科新说(2022年4期)2022-05-30
国画家(2021年4期)2021-10-13
舰船科学技术(2021年12期)2021-03-29
小哥白尼(军事科学)(2019年7期)2019-11-16
当代陕西(2018年12期)2018-08-04
青少年科技博览(中学版)(2017年1期)2017-03-02
小哥白尼·趣味科学画报(2016年1期)2016-05-30
学习月刊(2015年10期)2015-07-09
现代企业(2015年6期)2015-02-28
中国船检(2013年10期)2013-08-15