
均匀稀疏矩阵的全聚焦成像算法研究
2023-09-21 03:54刘文婧秦华军王建国王少锋
机械设计与制造 2023年9期
刘文婧,秦华军,王建国,王少锋
(1.内蒙古科技大学机械工程学院,内蒙古自治区机电系统智能诊断与控制重点实验室,内蒙古 包头 014010;2.内蒙古科技大学矿业研究院,内蒙古 包头 014010)
1 引言
超声相控阵检测是无损检测领域中常用的一种检测方法,在许多领域有着非常广泛的应用[1-4]。在超声相控阵检测成像技术中,全聚焦成像算法[5]作为一种高精度后处理成像技术,其以全矩阵采集数据[6]为基础,是一种离线式成像技术,能够对被检测区域内任意一点进行聚焦,被誉为超声相控阵检测成像中的“黄金法则”。但由于全矩阵数据量较大,难以实现实时成像,无法满足工业检测要求。为解决该问题:在硬件方面,文献[7]利用GPU硬件对成像算法进行并行计算,提高成像效率;文献[8]则利用FPGA并行计算来减小运算时间。文献[9]利用FPGA来加速全聚焦成像效率。虽然通过改善硬件结构可以加速成像速度,但存在发热及价格昂贵等问题[10]。在算法方面,文献[11-12]依据全矩阵数据对称性的特点,利用三角矩阵来减少数据量,但效果不是十分明显;文献[13]提出了基于频域波数算法的TFM 成像技术。该算法虽然避免了声束传播路径的复杂计算,但对于频域内的插值函数要求较高,直接影响到了成像结果。文献[14]使用稀疏阵列增大有效孔径方法减少了运算时间,但未考虑稀疏阵列后的声场变化,影响了成像质量。文献[15]提出了一种用于铝板近距离成像的稀疏TFM 算法,讨论了稀疏接收单元对计算效率和缺陷量化精度的影响。针对全聚焦算法成像效率低的问题,提出了基于均匀稀疏矩阵的全聚焦成像算法,通过减少阵元数目来压缩数据量,在保证一定成像精度的条件下提高了全聚焦成像效率。
2 原理
2.1 全矩阵数据采集
全矩阵数据的采集过程示意图,如图1所示。从1号阵元开始依次对N个阵元进行逐个激发,并在每次激励后采用全部阵元接收回波数据,由此可获得Nt*Nr个A扫时域信号。因此采集的全矩阵数据为N*N*A的三维数据矩阵。其中t为发射阵元的坐标,r为接收阵元的坐标,t=1,2,…,N,r=1,2,…,N。A为接收到的A扫超声回波信号。被检测区域内的所有声波信息全部包含于全矩阵数据中。
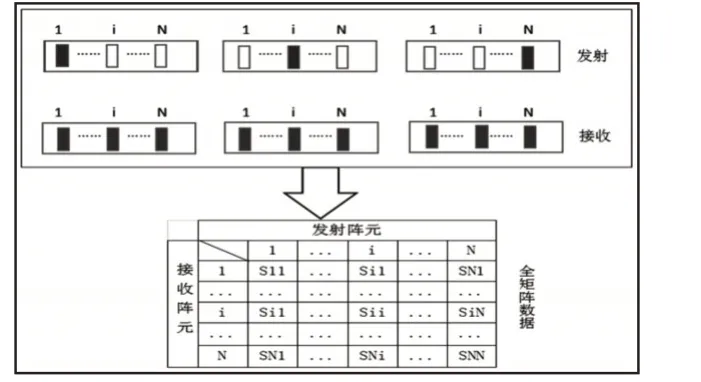
图1 全矩阵数据采集示意图Fig.1 Schematic Diagram of Total Matrix Data Acquisition
2.2 传统全聚焦成像
传统全聚焦成像算法利用了全矩阵中的所有数据,依据波的叠加原理,对扫描区域内的所有聚焦点进行对应回波幅值的索引和叠加,从而获得该聚焦点处的完整幅值信息,原理图如图2所示。以图2中某一点为例,根据声束的传播路径,利用式(1)计算出全矩阵数据中所有A扫信号在该点处的幅值,并进行叠加求和,从而获得该聚焦点处总的声波幅值。依次完成聚焦区域内所有聚焦点处的幅值计算,便可实现对被检测区域的全聚焦成像。

图2 全聚焦原理示意图Fig.2 Schematic Diagram of Total Focus Principle
式中:h1、h2—发射阵元i与接收阵元j到缺陷的距离;C—超声波在传播介质内的声速;t—采样点的时间间隔,即采样频率的倒数,可由式(2)求得。
2.3 基于均匀稀疏矩阵的全聚焦成像
基于均匀稀疏矩阵的全聚焦成像算法与传统全聚焦算法有所不同,其核心思想是将均匀稀疏矩阵数据与全聚焦算法相结合,通过减少数据量来加快成像速度,为提高全聚焦成像效率提供一种可能的方法。
全聚焦算法是一种基于全矩阵数据的离线式后处理成像技术[16],因此可以通过对全矩阵数据稀疏优化处理。以2 阵元为例,如图3所示。为2阵元均匀稀疏矩阵数据采集过程。对具有64阵元的线阵探头进行2阵元的均匀稀疏优化,取1,3,5,…,63阵元为有效阵元,其他阵元为无效阵元。均匀稀疏矩阵由所有有效阵元接收到的超声回波数据构成。
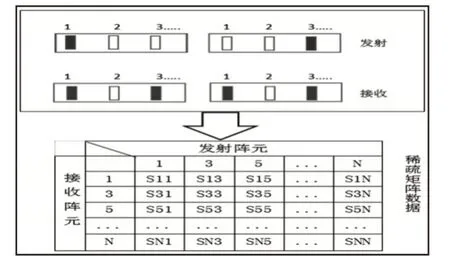
图3 均匀稀疏矩阵数据采集过程Fig.3 Data Acquisition Process of Uniform Sparse Matrix
完成均匀稀疏矩阵数据的采集后,利用新的有效阵元和对应的稀疏矩阵数据,依次完成成像区域内所有聚焦点处的幅值计算,实现对检测区域的全聚焦成像结果,如图5(b)所示。在提高成像效率的同时,为避免图像质量降低造成缺陷的漏检和伪像的产生,对基于均匀稀疏矩阵的全聚焦算法进行幅值校准。计算所有聚焦点处的平均幅值,低于该平均值的聚焦点统一取所有聚焦点中的最小幅值,而大于或等于该平均值的聚焦点幅值不变,进行幅值校准后的检测图像,如图5(c)所示。
3 检测实验
全矩阵数据采集系统由计算机、64阵元相控阵线阵探头、相控阵超声信号采集系统构成[17]。实验中有关超声相控阵的参数,如表1所示。
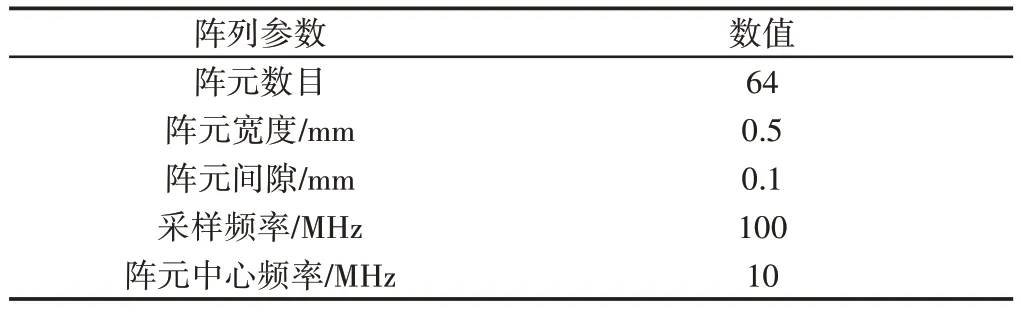
表1 超声相控阵参数Tab.1 Ultrasonic Phased Array Parameters
待测试块示意图,如图4所示。超声波在该试块内的传播声速为5730m/s,该试块上待测区域的范围为深25mm,宽40mm的矩形区域。该区域内存在18个均匀分布的侧边通孔缺陷。

图4 实验试块及其缺陷特征示意图Fig.4 Schematic Diagram of Experimental Block and its Defect Characteristics
实验采用直接接触法,以酒精为耦合剂,将探头直接耦合在试块上。按照全矩阵数据的采集步骤,依次完成所有阵元的发射与接收,获得用于全聚焦后处理成像的全矩阵数据。该矩阵由(64×64)个A扫信号构成;随后,按照均匀稀疏矩阵数据的采集步骤,进行2阵元的均匀稀疏,并采集对应的稀疏矩阵数据。该矩阵与全矩阵数据中的A扫信号具有相同的采样点数,但A扫信号数目不同。最后,基于MATLAB 2018a软件平台,利用传统全聚焦算法与这里提出的基于均匀稀疏矩阵的全聚焦算法对缺陷进行成像。
4 结果与讨论
4.1 成像质量
传统全聚焦算法、基于2阵元均匀稀疏矩阵的全聚焦算法及其校准后的成像结果图,如图5所示。
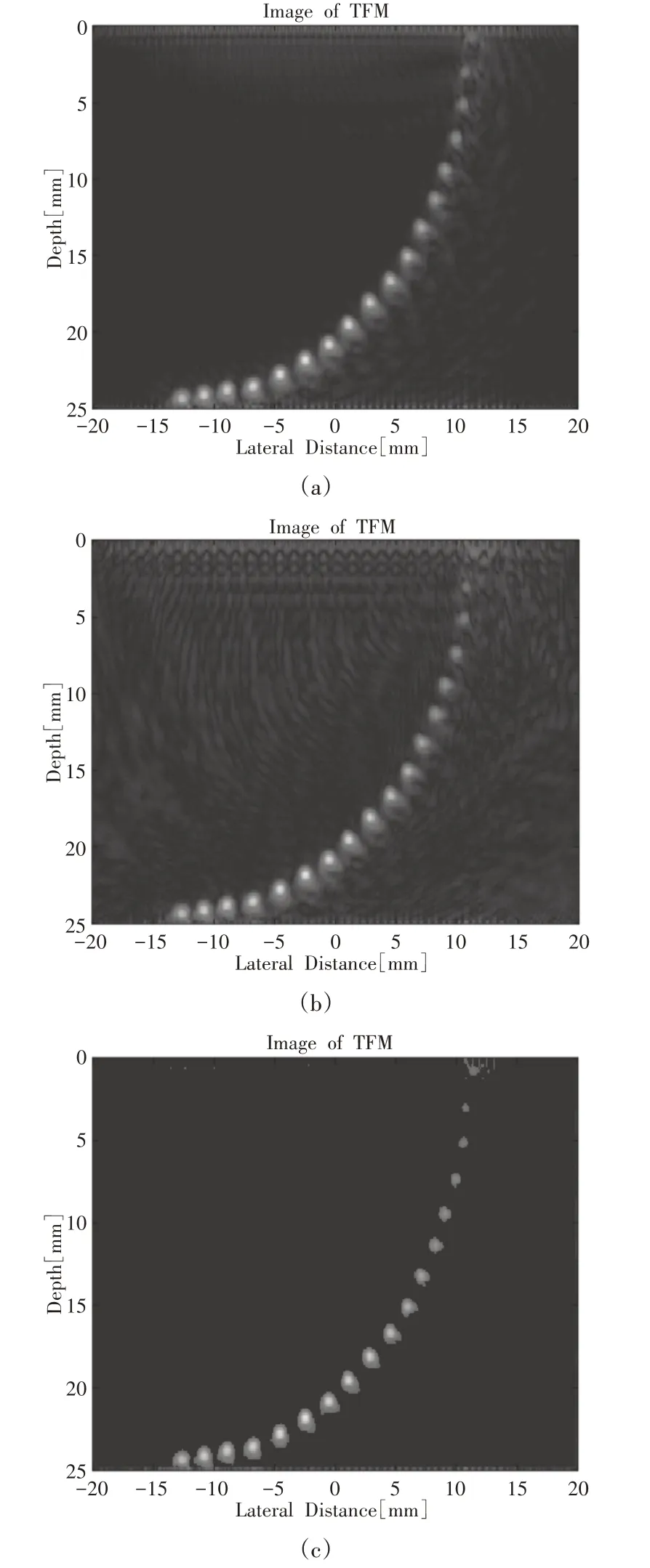
图5 传统全聚焦与稀疏、稀疏校准后的全聚焦成像Fig.5 Conventional Total Focus Imaging with Sparse and Sparse Calibrated Total Focus Imaging
某一侧边孔缺陷5在不同全聚焦算法条件下的位置信息对比分析,如表2所示。结合图5,通过对比图像质量,不难发现:相较于传统全聚焦成像,基于均匀稀疏矩阵的全聚焦成像图像质量随着稀疏阵元数的增加有所降低,但基于均匀稀疏矩阵的全聚焦成像算法在校准之后图像质量得到明显提高,对缺陷的反映能力不仅不会降低,成像效率也得到显著提高。
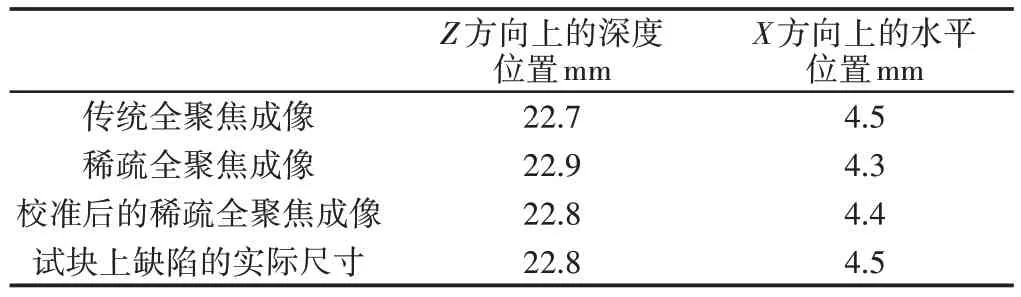
表2 不同全聚焦条件下缺陷位置信息对比分析Tab.2 Comparative Analysis of Defect Location Information Under Different Total Focus Conditions
4.2 成像效率
传统全聚焦算法与基于均匀稀疏矩阵的全聚焦算法的成像时间对比,如表3所示。由表可知,基于均匀稀疏矩阵的全聚焦算法利用的矩阵数据量大大减少,运算时间得到缩短,以2阵元稀疏为例,成像时间为153s,相比于传统全聚焦算法的246s,成像效率提高了近38%。
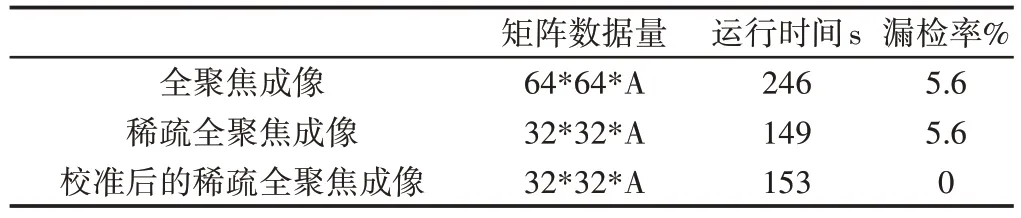
表3 成像效率对比分析Tab.3 Comparative Analysis of Imaging Efficiency
从成像原理方面分析,传统全聚焦算法需要利用到(64×64)个A扫信号,而这里提出的算法则大大减小了矩阵数据量,以2阵元稀疏为例,仅需利用(32×32)个A扫信号,有效减少了循环运算的时间。因此,基于均匀稀疏矩阵的全聚焦算法可以有效压缩数据量,减少运行时间,提高全聚焦成像效率。
5 结论
以全矩阵全聚焦成像技术为基础,提出了基于均匀稀疏矩阵的全聚焦后处理成像算法,实现了对传统全聚焦成像算法的改进,提高了检测成像效率。
(1)针对传统全聚焦成像技术存在的数据量大、成像效率低的问题,对传统全聚焦算法进行了改进,提出了基于均匀稀疏矩阵的全聚焦改进算法。
(2)这里在成像质量、成像效率方面,对比分析了传统全聚焦成像技术与基于均匀稀疏矩阵的全聚焦成像技术。结果表明:基于稀疏矩阵的全聚焦成像算法的成像效率提高了近38%,图像质量也相对得到了改善。
(3)基于均匀稀疏矩阵的全聚焦后处理成像算法不仅提高了全聚焦成像速度,而且对硬件要求较低,为超声相控阵全聚焦快速成像提供了一种参考方法。
猜你喜欢
北京大学学报(自然科学版)(2021年3期)2021-07-16
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
东北师大学报(自然科学版)(2021年1期)2021-03-27
电脑爱好者(2020年19期)2020-10-20
电子制作(2019年13期)2020-01-14
下一代英才(酷炫少年)(2019年3期)2019-03-25
电子制作(2019年24期)2019-02-23
下一代英才(酷炫少年)(2018年12期)2018-12-29
下一代英才(酷炫少年)(2018年10期)2018-11-23
