自主代客泊车系统技术路线研究
2023-09-23 11:10秦建波钟胜华陈诚
汽车与驾驶维修(维修版) 2023年8期
关键词:技术路线
秦建波 钟胜华 陈诚
关键词:自主代客泊车;技术路线;系统方案;车端;场端;车场融合
0引言
目前,停车对于很多驾驶员来说,依然是最具挑战性的驾驶任务之一。车辆必须在狭窄的空间内向后移动,碰撞概率很高[1]。其复杂性在于驾驶者是否具有合适的停车策略,同时能够恰当地控制车辆纵向和横向运动,以及避免环境中的障碍物。此外,现代车辆设计、安全要求和空气动力学对车辆的全方位能见度有负面影响。因此,在停车过程中发生物理碰撞或损坏事故也是常见的。目前很多车辆都通过提供全自动停车功能来解决这个问题。自动代客泊车(AutonomousValetParking,AVP)甚至可以进一步完成停车任务,也变相提高了停车场端车位资源的利用率。
自主代客泊车是指用户在指定地点通过,移动端发送停车或者取车的命令[2],车辆凭借自动驾驶的技术替代驾驶员实现车辆行驶与停泊的工作。本文从自主代客泊车技术演进、不同技术方案两个维度来分析对比并预测。
1自主代客泊车技术演进过程
近年来,为解决城市停车难题和提升驾驶体验,自主代客泊车技术和相关产品的研究与发展越来越深入,可以划分为以下几个阶段:半自动泊车、全自动泊车、遥控泊车、辅助代客泊车、全自主代客泊车和完全自动驾驶[3-4]。
在2016年之前是半自动泊车阶段,AVP系统通过超声波雷达和算法操控方向盘,这种方式需要驾驶员保持对驾驶环境的监控和控制。2018年,AVP系统进入到全自动泊车、遥控泊车阶段,采用超声波和环视的方法实现了10m内全自动融合泊车的遥控泊车。在2021—2022年,AVP系统发展到辅助代客泊车阶段,这一阶段系统能够自主导航和泊车,并与交通管理系统进行交互。车辆能够在100m的范围内进行自动驾驶泊车,但仍然需要驾驶员的参与,并没有将用户彻底解放。
2AVP系统方案分析
自主代客泊车系统技术路线根据在基础设施与车辆之间如何分配智能[5],可以分为三类:基于车端智能技术路线,将智能分配给车辆;基于场端智能技术路线,将智能分配给基础设施,并仅向车辆添加远程控制单元;车场融合技术路线,同时分配给车辆和基础设施,以实现相互支持。
2.1基于车端智能技术路线
基于车端智能技术的AVP系统通过在车辆内部集成多种传感器和关键技术,实现自主巡航、停车位搜索以及停车操作等功能。其中关键的传感器包括激光雷达、摄像头和超声波传感器等。激光雷达用于测量周围环境的距离和形状,提供精确的障碍物检测和地图构建;摄像头用于获取道路信息、识别交通标志和识别其他车辆、行人等目标;超声波传感器用于与停车场设施和其他车辆进行距离测量。基于车端智能技术还需要依赖自动驾驶系统、路径规划和控制算法等。自动驾驶系统通过整合传感器数据并进行实时判断和决策,完成车辆的自主驾驶;路径规划算法根据用户指令和场景信息,规划适合的停车路径;控制算法则负责执行具体的驾驶操作。
基于车端智能技术的优势,在于具有较高的独立性和环境适应性。由于传感器和计算设备直接搭载在车辆上,系统能够不借助停车场的基础设施,即时感知并响应环境变化,快速做出决策并执行相应的行动。这种独立性使得系统能够在复杂的城市环境下稳定运行,并且能够适应各种不同的停车场场景,提供灵活的停车服务。但是,基于车端智能技术的自动代客泊车系统也存在一些局限性。
首先,车辆本身的限制会对系统的性能产生影响。例如,车辆所搭载的传感器可能受到天气条件和光照情况等因素的干扰,从而影响感知和判断的准确性。
其次,为了实现单车智能往往会搭载昂贵的传感器,对感知和计算平台的要求也较高,导致车辆成本较高。
最后,目前单车智能AVP最薄弱的地方在于室内定位。尤其是在室内停车场的场景下,单车智能AVP面临的主要问题是没有GPS信号或者GPS信号较弱,从而导致定位精度不高或者无法定位,使得进入室内停车场和远程唤醒时的车辆无法做到高精度的初始定位,不能達到AVP定位要求。这一情况也是目前限制单车智能AVP使用范围的因素之一。
2.2基于场端智能技术路线
在基于场端智能技术的AVP系统中,停车场负责实现环境感知、车辆定位和路径规划等功能。在停车场内部布置有激光雷达、摄像头和地磁传感器等多种传感器,其中激光雷达用于感知环境中障碍物并生成高精度的地图数据;摄像头可获取道路信息、识别交通标志和识别障碍物等;地磁传感器用于检测停车位的占用情况。这些传感器通过实时采集和处理数据,经过数据融合和路径规划等算法的处理,将控制指令发送给车辆,从而实现远程控车。
基于场端智能技术路线优势在于高度集成化,所有的计算和决策过程都在停车场内部完成,无需车辆携带大量的传感器和计算设备,简化了车辆设计和制造。场端还具有的优势为扩展性强,停车场可以部署更多的传感器和计算设备,以提高系统的感知和决策能力,方便后续升级和扩展。另外,数据共享也会更加便利,停车场内的设备可以通过网络进行数据交互和共享,实现更高效的信息传递和协作。
然而,基于场端智能的方案也存在一些劣势,那就是对停车场基础设施的要求高,需要在停车场内部布置大量的传感器和计算设备,涉及到设备的安装、维护和更新,成本较高且投资回报长。相应系统的使用范围也会相应的受限,对于没用经过改造的停车场是无法使用的。此外,依赖于停车场的网络和计算能力,停车场内的设备需要具备足够的计算和通信能力,来处理大量的传感器数据和实时决策,基础设施也需具备较高的性能和稳定性。
2.3车场融合技术路线
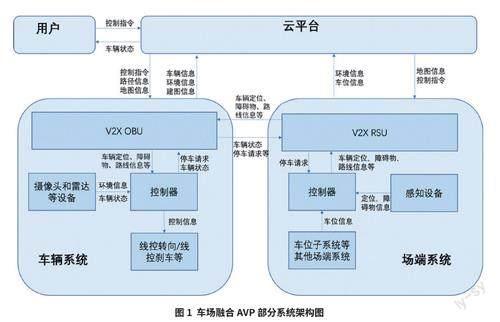
对于车场融合的技术路线,是将场端智能和车端智能相结合,充分利用停车场与车辆上的传感器和计算设备。该方案系统框架如图1所示。其中,场端主要负责提供辅助功能,如室内车辆定位、室内通信、车位搜索、路径规划以及监测停车场环境。摄像头布置在停车场各个位置,用于实时监测停车场内的车辆和环境情况。通过图像处理算法,可以提取车辆与障碍物的特征信息。此外,感知设备用于测量车辆与障碍物之间的距离,以避免碰撞,并发送信息进行预警。而V2X设备则可以在室内停车场建立实时通信,并且广播室内地图、障碍物和预留车位等信息。场端还会对传感器获取的数据进行实时处理与分析,采用算法来进行车位搜索、路径规划和停车操作等。
车端主要负责感知车辆周围的障碍物和路面状况,以及实现自主驾驶和停车操作。为了实现这些功能,雷达和相机被安装在车辆上。雷达可以提供车辆周围的感知数据,而相机可以拍摄和识别交通标志、标线等道路信息,并用于车辆定位和环境感知。此外,车速传感器用于测量车辆的速度和加速度,提供运动状态的实时数据。车端同样会对传感器获取的数据进行实时处理与分析,采用感知融合算法和决策算法来实现车辆自主驾驶和停车操作。
基于场端与车端结合的智能技术方案的优势在于场端和车端的信息融合,能够提供更全面、准确的环境感知和位置定位,增强系统的安全性和精度。通过充分利用场端和车端的传感器数据,可以更好地避免障碍物,并提供准确的停车位置信息。另外,技术协同使得系统具备更高的鲁棒性和灵活性。场端和车端共同参与决策和规划过程,实现分布式的感知、决策和控制,从而能够应对不同的情况和变化。
然而,基于场端与车端的结合需要场端和车端之间的信息交互和协调,对通信和数据传输提出了更高的要求,同时目前还没有统一的通信协议与停车场地图构建标准。因为同时涉及到场端与车端,其中牵扯到的行业与企业相关利益方更多,对于其中的协同处理与开发的难度也将大大增加。
3AVP系统方案对比
经过对比,本文认为车场融合AVP的技术路线是优于单独依靠车端智能或者场端智能的技术路线。
首先,在安全方面,车场融合技术本身的优势在于拥有车端与场端同时提供的安全保障。不像只基于车端或者场端的AVP,当发生感知设备突然出现故障的情况,会导致系统整体无法完成系统功能。而车场融合的方式也能够对障碍物感知结果进行对比,增加可信度。
其次,对于适用场景,基于场端智能的技术方案只能够在提前经过针对AVP改造的停车场内使用,这种改造需要对停车场每个角落进行设备部署,从而限定了对环境的高要求。而基于车端智能的AVP目前需要高精度地图的支持,需要提前对地图采集与制作才能够实现自主代客泊车的功能应用,这种限制导致单车智能的技术路径不能实现首次来到陌生停车场的AVP。而采用车场融合的方案则可以减少场端设备布置的数量,降低对环境的要求,并且对于陌生停车场的室内地图,可以由停车场端提前采集与制作,借助场端设备发送给车端,从而增加AVP技术的适用场景。
再次,车场融合方案也能够提供额外的辅助信息,如辅助定位信息、全局信息、停车场设施信息与车位信息等。单车智能的AVP找寻空闲车位时,会存在空闲车位不断被占用,空闲车位位置不断变换从而未能找到可停车位的情况,这时车辆就会在停车场内不断绕圈,在狭窄的环境中造成堵塞、资源浪费与增加停车时长。而借助车场融合技术能够彻底解决这个问题,通过场端对车位信息的感知将空闲车位信息通过V2X链路传输给车辆,相当于为车辆增加了额外的感知途径,从而辅助车辆决策,完成系统功能。
最后,对于投资与商业化,基于车端的AVP需要搭载昂贵的激光雷达等传感器设备,这导致车辆的成本大大增加,同时也相当于在AVP用户中筛选掉了一部分无法支付昂贵车辆费用的用户,从而减少了受众数量。而借助场端AVP的技术来实现AVP,需要停车场场商提前投入大量资金去改造现有停车场,并且这一投资的回报周期会十分长久,这也导致停车场场商的现金流受到影响,从而增加其风险。借助车场融合技术与V2X技术,不但能解决单车智能所面对的定位问题,而且能够减少场端设备的大量投资。将投资来源分摊给汽车企业与停车场场商,既提高了各自参与的积极性,也完成了商业闭环,使得双方都能够获得利益,从而推进AVP技术的量产。
4结束语
综上所述,基于车场融合的技术路线将会是未来AVP落地的趋势。与基于场端或者车端的AVP相比,车场融合的AVP能够提高系统的整体的安全性,扩大技术的适用场景,提供更多有价值的信息,降低投资风险,形成商业闭环。同时,该方案也解决了单独基于场端或者车端所解决不了的问题,如单车绕圈、场端建设昂贵等。虽然车场融合的方案也存在一些挑战,如前文所提到的系统复杂性增加以及受益方之间不好协同等,但是通过通信、自动驾驶以及高精度地图等技术的不断发展,车端与场端的共同努力,车场融合的技术路线在普适性与安全性都将展露出车场融合的價值,从而加快AVP技术落地。
猜你喜欢
吉林农业·下半月(2017年3期)2017-04-14
农民致富之友(2017年4期)2017-04-10
科学与财富(2017年5期)2017-03-21
中国新技术新产品(2017年4期)2017-03-04
中国科技纵横(2016年20期)2016-12-28
现代商贸工业(2016年14期)2016-12-27
科教导刊·电子版(2016年18期)2016-07-18
安徽农学通报(2015年2期)2015-02-12
中国建筑科学(2014年7期)2014-09-29