
无人机倾斜摄影在矿山测量中的应用研究
2023-10-10 09:11张勇
河南科技 2023年16期
张 勇
(福建省闽北地质大队,福建 南平 354000)
0 引言
为修复矿山开采对环境造成的破坏,快速获取矿山大比例尺地形图是十分有必要的。将无人机倾斜摄影技术应用于矿山大比例尺地形图成图中,能有效节约测量成本,提高矿山地形图测绘工作效率,但在环境恶劣中,受到不利因素的影响,导致无人机倾斜摄影测量成果的质量不高。因此,对无人机倾斜摄影技术在矿山地形图测绘中的应用进一步分析是十分有必要的,通过探究其实用性、可行性来提升测量效果带来的经济效益和社会效益。
1 无人机倾斜摄影技术的基本原理
无人机倾斜摄影测量技术可分为无人机技术和倾斜摄影测量技术。其中,无人机是搭载倾斜摄影测量设备的平台,由倾斜摄影测量设备来完成摄影测量任务,通过传感器设备、姿态控制系统、导航定位系统、数据处理系统等完成对数据的获取和处理。传感器(相机、激光雷达等)用于采集目标区域的影像、点云数据等;姿态控制系统用于控制无人机的飞行姿态和拍摄角度;导航定位系统可对目标进行精确定位,从而确保拍摄数据的准确性;数据处理系统对采集到的影像、点云数据进行处理和融合,得到目标区域的高精度三维模型。
利用无人机搭载的多台光电传感器,结合定位、摄像等技术,在高空从垂直、倾斜等角度实时采集影像,获取更加全面、完整、精准的地物、地形地貌信息。无人机上1个垂直向下的镜头拍摄的影像被称为正片影像,而其他4个镜头与地面形成倾斜夹角,从这4 个方向拍摄的影像被称为斜片影像,其具有多角度影像信息。影像信息中有多种不同的真实信息,以高分辨率的真彩色数字影像为基础[1],对影像进行校正、空三加密处理,从而获取影像数据,影像上各点都带有平面坐标(X,Y)和高程(H)信息,基于影像数据可直接计算出距离、面积、高度等数据。
2 无人倾斜摄影在矿山测量中的应用优势
2.1 无人机倾斜摄影获取数据周期短
无人机倾斜摄影具有作业周期短、高效率等特点,能有效提高矿山测量效率。利用无人机对矿山测量,能快速获取分辨率更高的影像数据。无人机倾斜摄影能大大减少人力、成本等的浪费,项目工期可缩短1/3以上,提高整体工作效率,在短时间内获取影像资料,确保影像资料的时效性。
2.2 无人机倾斜摄影能降低技术人员劳动强度
矿区地形较为陡峭,交通不便,不易行走。传统的矿山地形图测量是将笨重的仪器设备搬到矿区,给测量工作造成极大困难,测量人员要一点一点地对地物、地形地貌进行测量,外业工作强度极大。无人机倾斜摄影是利用遥感法对矿区地形地貌数据进行采集的,能大大减轻作业人员的工作强度。
3 无人机倾斜摄影技术应用实例
3.1 矿区概况及成图主要技术要求
本研究以某矿山区域为例,为修复矿山开采对环境造成的破坏,快速获取该矿山实景三维模型及1∶1 000 数字化地形图。为提高测绘效率,利用无人机倾斜摄影技术来进行数据生产。实施倾斜摄影的区域面积约为0.24 km²,长度约为600 m、宽度约为400 m,如图1 所示。测量区域内高程最高约为66 m、高程最低约为2 m、高差最大约为64 m,地形为丘陵地形,通视条件良好,周边200 m 内无居民地、无高大建筑物[2]。成图比例尺为1∶1 000,基本等高距为1.0 m。按照城市测量规范中的规定,地物点相对邻近平面控制点的点位中误差应小于±0.5 m、等高线插求点相对邻近图根点的高程中误差应小于±0.5 m。
图1 矿山区域
3.2 像片控制点布设与测量
像控点的布设要充分考虑现场地形地貌,一般像控点布设在清晰的线状地物交点、明显地物的折角顶点,如道路拐点及清晰的颜色纹理变化分界点处。本研究按间距为250~350 m 布设1个像控点,共布设9个像控点。
平面坐标统一采用2000 国家大地坐标系,高斯-克吕格投影中央子午线为120°,按3°分带,高程系统采用1985 国家高程基准[3]。使用大疆精灵Phantom 4 RTK 四旋翼无人机对像控点平面坐标及高程进行观测,其具有定位坐标测量功能。无人机开始倾斜摄影时,可同步获取像控点平面坐标及高程,完成对像控点平面及高程的控制测量。在布设的9个像控点中,选取分布均匀的7个像控点参与平差计算,另外2个像控点作为空三检查点进行检核。经空三测量检核后发现,满足像片控制点相对最近基础控制点的平面位置中误差、高程中误差的精度要求。
3.3 倾斜摄影影像获取
使用大疆精灵Phantom 4 RTK 四旋翼无人机来获取倾斜摄影影像。在奥维地图上圈定开采矿山范围线,使用基线、航线间距、地面分辨率、相对航高等技术指标,完成对无人飞行器航线规划路线的设计。该矿山区域倾斜摄影相对航高为150 m、航线间距为100 m、航向重叠为80%、旁向重叠为70%、矿区平均高程面影像地面分辨率优于8.0 cm,共飞行4 架次。为确保所摄影像能全面覆盖整个矿区,航向及旁向覆盖均超出测区边界线一个相对航高值范围,获取分辨率优于8.0 cm 的倾斜摄影影像共计215张。
3.4 实景三维模型制作
街景工厂StreetFactory、ContextCapture 等软件是当前实景三维建模的主流软件,基于图形运算单元GPU 的ContextCapture 快速三维场景运算软件无须人工操作,就能从简单连续影像中生成最逼真的实景真三维场景模型[4]。通过平台使像控点坐标数据、倾斜多视影像数据、POS 数据参与到实景三维模型数据生产中。实景三维模型生产过程如下。首先,在布设的9 个像控点中选取分布均匀的7 个像控点,并参与到多视影像联合平差的计算中,另外2 个像控点作为空三检查点进行检核;其次,通过软件完成多视密集影像匹配,形成超高密度点云,构建三维TIN 网和白模;最后,利用纹理映射来生成实景三维模型。
3.5 矿山地物图要素采集
该矿山大部分区域的地形地貌包含简易公路、水系等要素。因此,主要是对地形地貌要素进行采集。通过清华山维EPS 三维测图软件来加载实景三维模型“.osgb”格式数据,在实景三维模型上对全部带有平面坐标(X,Y)和高程(H)信息的地形地貌要素进行采集,采集高程点注记间距按《城市测量规范》(CJJ/T 8—2011)中的要求。该项目高程点注记间距取20 m,在实景三维模型上共采集高程点1 452 个,利用高程点数据生成等高距为1.0 m 的矿区地形图,如图2所示。
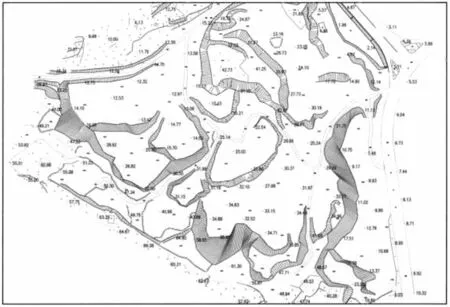
图2 矿区地形图
4 精度测算
利用南方RTK 仪器来实地采集特征点平面坐标、碎部点高程,与在实景三维模型上采集到的特征点平面坐标、碎部点高程进行对比,统计各项精度指标。评估由无人机倾斜摄影编制的矿山1∶1 000数字化地形图的实用性、可靠性,并从特征点平面坐标、碎部点高程这2个方面对该应用案例的测量精度进行评估。
4.1 特征点两次测量平面坐标值的差值
利用南方RTK 仪器来实地采集13 个特征点的平面坐标,包括简易房屋角点、道路交叉点等,将外业实地测量特征点的平面坐标值与在实景三维模型上采集同点位特征点的平面坐标值进行对比,计算出特征点平面坐标值较差,结果见表1。

表1 南方RTK测量与三维模型上采集特征点的坐标值比较
4.2 碎部点两次测量高程的差值
使用南方RTK 仪器对27 个碎部点的地形高程进行实地采集,将外业实地测量的碎部点高程值与在实景三维模型上采集同点位的碎部点等高线内插高程值进行比较,计算出高程值较差,结果见表2。

表2 南方RTK测量与三维模型上采集碎部点的高程值比较
4.3 精度评估结论
由表1 可知,利用南方RTK 测量特征点得到的平面坐标值与实景三维模型上采集到的特征点的平面坐标值之间较差的最大值为±49.4 cm、平面中误差为±32.1 cm,满足《城市测量规范》(CJJ/T 8—2011)中的规定,即比例尺为1∶1 000的丘陵地形地物点相对邻近平面控制点的点位中误差不应大于±50.0 cm的精度要求。
由表2 可知,利用南方RTK 测量的碎部点高程值与实景三维模型上采集的同点位的等高线插求点高程值之间较差的绝对值最大为45.0 cm,高程中误差为±27.8 cm,满足《城市测量规范》(CJJ/T 8—2011)中的规定,即例尺1∶1 000 丘陵地形碎部点的检测高程与原测内插高程的较差不应大于±60.0 cm、等高线插求点相对于邻近图根点的高程中误差应不应大于±50.0 cm的精度要求。
研究结果表明,利用无人机倾斜摄影技术进行比例尺为1∶1 000的测图,具有生产速度快、测量精度高的优点,可节省大量人力物力。基于实景三维模型对矿区进行地物、地形地貌要素进行采集,编制矿区数字化地形图,外业通过实地采集地面点的平面坐标、高程,经精度统计可知,该矿区1∶1 000数字化地形图的平面、高程满足规范规定的精度要求,符合实际生产需求,具有较高的可行性、实用性。
5 结语
无人机倾斜摄影能提高矿山大比例数字化地形图测量的效率,体现出无人机技术在矿山测量中的应用价值。在矿山测量应用案例中,通过与全野外数字化测量在像控点坐标、碎部点高程等的差值进行比较,验证了利用无人机倾斜摄影编制的1∶1 000数字化地形图的平面、高程满足规范中规定的精度要求,测量结果是可靠的,且具有较高的实用性和可行性。无人机倾斜摄影虽具有很大优势,但其续航能力差,风大时影响其飞行质量,也限制了无人机在测绘地理信息行业中更深层次的应用。因此,要进一步探讨无人机倾斜摄影测量的影响精度因素,优化作业模式,提高模型精度[5]。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
人民交通(2022年5期)2022-06-16
测绘工程(2021年5期)2021-09-13
华人时刊(2021年23期)2021-03-08
当代陕西(2020年23期)2021-01-07
资源导刊(信息化测绘)(2019年4期)2019-05-18
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
北方音乐(2017年4期)2017-05-04
全球定位系统(2015年4期)2015-02-28
铁道科学与工程学报(2014年5期)2014-08-06
