
高压电线巡检机器人结构设计与试制
2023-10-11 12:50罗金武陈廷兵张琳丰陈思宇赵威蕤
成都工业学院学报 2023年5期
罗金武,徐 瑞,陈廷兵,张琳丰,陈思宇,赵威蕤
(成都工业学院 智能制造学院,成都 611730)
高压输电线路因其常年裸露在空气中,会导致高压电线出现雷击破坏、表皮氧化、杂物缠绕等影响供电的问题[1-3]。为保障高压输电线路安全平稳地运作,必须对高压电线实施定期巡检工作[4]。目前,电线巡检的主要方式多为人工巡检,要求施工人员在高空中利用基础设备依靠人力来完成对电线的巡检和维护。人工巡检不但费时费力,而且还具有较高的危险系数,如遇大风、地震、暴雪等极端气候,人工巡检的难度将会直线上升,这对施工人员的身体机能和工作素养均提出了极高的要求。因此,设计可主导完成高压电线巡检的自动化或半自动化智能装置至关重要。
随着移动机器人技术的发展,诸多学者相继研发了不同结构的高压电线巡检机器人,较为典型的有Sawada等[5]设计的光纤复合架空地线巡检移动机器人,Peungsungwal等[6]设计的自供电巡线机器人,Pouliot等[7]开发的悬臂机器人“LineScout”以及Debenest等[8]研制的双线行进机器人“Expliner”等。近年来,我国也开展了对高压电线巡检机器人的探索。Wang等[9]率先研制了一款异位双臂悬挂式的超高压500 kV巡线机器人。宋树伟等[10]采用双手臂轮臂复合结构设计了一款巡检机器人;王相等[11]基于动物仿生学原理提出了一种两吊臂摆动式巡线机器人。冯晨光[12]提出一种双臂可对称式开合的巡检机器人。以上研究均为高压电线巡检机器人的开发和应用提供了较高的参考价值。但目前学界提出的各类巡检机器人大多处于试验阶段且有着各自的使用限制。当前,面对巡检机器人市场的强烈需求,仍需加强对相关机器人设计与开发的探索。为此,本文在前人的研究基础上,采用仿生原理提出了一种蛇形仿生电线巡检机器人,通过三维建模与运动仿真技术完成了对机器人的结构设计与运动分析,并为机器人配备了相应的电控系统以实现机器人的全自动运行和远程操控,经过样机试制和控制调试使得机器人具备了分段避障(绕桩)和自主换线功能。
1 巡检机器人总体设计方案
1.1 机器人结构功能分析
综合考虑高压电线的线路环境、巡检成本以及机器人的电源配置,设计的巡检机器人总体采用挂线式方案,即机器人本体附着于线缆上开展巡检工作。
机器人在巡检时,将不可避免地与线路支撑铁塔、压接管、防震锤等基础电力设施发生交汇。在此运行环境下,为保证“一次上线”便完成巡检工作的需求,设计的机器人除了必要的视觉巡检功能外,还应具备基础的行走、避障(绕桩)和自主换线功能。其中行走、避障和自主换线功能需在结构设计上进行实现。
1.2 设计方案与工作原理
设计的巡检机器人由蛇形模块化机械系统和控制系统共同组成,如图1所示。
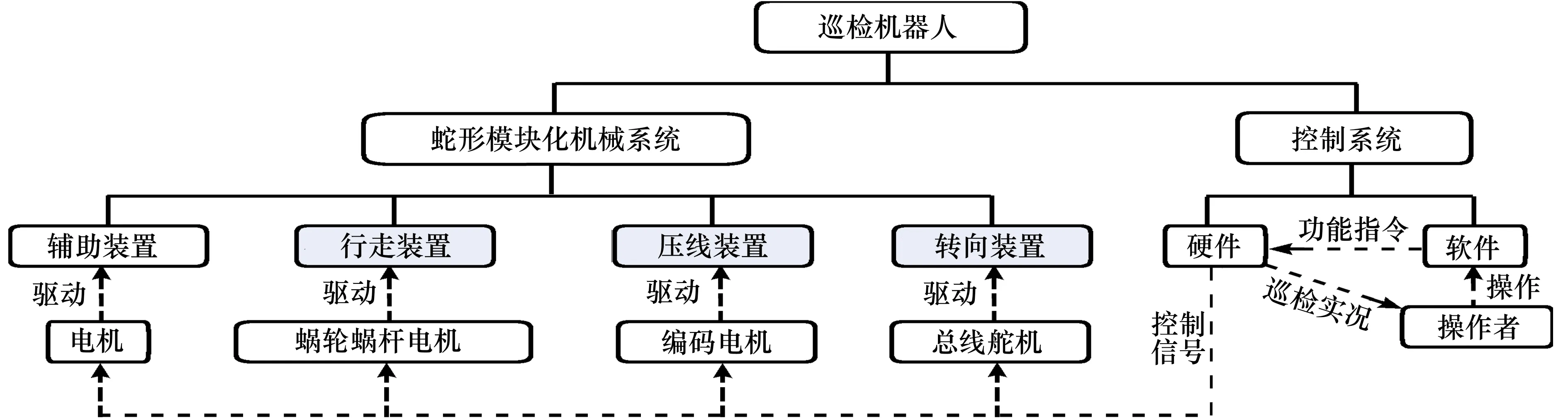
图1 巡检机器人的系统组成方案
巡检机器人的机械系统主要由行走装置、转向装置和压线装置构建的蛇形臂模块组合而成,如图2所示。该机器人利用了多关节蛇形臂架构和“头部决策,尾部跟随”的仿生操控方法,由4个及以上带有压线装置、行走装置、转向装置(2个旋转自由度)的机械蛇形臂模块组成,该蛇形臂模块可称为单元,如图2(b)所示,转向装置安装在2个行走装置之间。整个机器人如同1只蛇形机构,机器人各单元之间相互连接,每个单元均有2个旋转自由度来协同配合,进而完成巡检机器人的姿态变换。

(a)结构示意图
正常情况下,只需控制行走装置便能实现机器人的直线巡检功能。在巡检时若遇见防震锤、气压接管等障碍物,可通过控制各单元之间的转向装置与压线装置使得行走装置脱离(或回归)巡检电线,在各单元脱离或回归的相互配合下,实现越障,如图3所示。同理,若机器人巡检时需要更换到相邻的电线上,亦可在各单元的相互配合下实现换线。

(a)越障前
2 主体部件设计与选型分析
2.1 行走装置
如图4所示,行走装置主要由电机、齿轮机构、下滚轮等部件组成。行走装置空间占用率小,转矩大,能稳定地带动机器人前进。整个装置由电机驱动,经过齿轮机构将驱动扭矩传递至带有下滚轮的输出齿轮上,促使下滚轮与电线下表面接触产生滚动摩擦力,在滚动摩擦力的作用下实现机器人的行走。
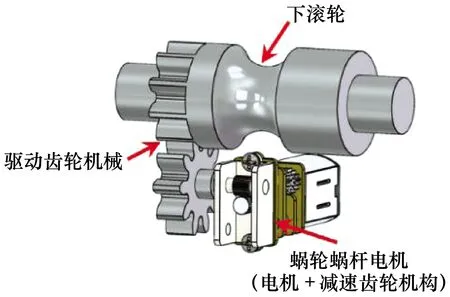
图4 行走装置结构模型
行走装置的齿轮机构包含减速齿轮机构、驱动齿轮机构。考虑到使用要求,用于减速的齿轮机构不适宜过大,故选用减速比和转矩比较大的蜗轮蜗杆电机(包含电机、减速齿轮机构)。
蜗轮蜗杆电机的选型原则:在电机尺寸尽量小的前提下,输出的驱动力矩大于理论驱动力矩,同时保证转速不能太低。其中,单个蜗轮蜗杆电机的理论驱动力矩:
T1=μMgR。
(1)
式中:M为每个单元的质量,kg;μ为滚轮与电缆钢包线的接触摩擦系数;g为重力加速度,m2/s;R为滚轮半径,m。
驱动滚轮行走的驱动齿轮机构是传动比为1∶1的直齿轮传动机构,可保证传动的稳定性,节省机器人空间,使机构更为紧凑,工作可靠,寿命长。下滚轮与输出齿轮固连在同轴上,既简化结构布局又能保障输出驱动扭矩的有效传递。
2.2 压线装置
如图5所示,压线装置主要包含上滚轮、升降杆、滑台、螺纹编码电机等部件。螺纹编码电机上的螺纹杆、升降杆(带螺纹孔)与导向棒三者之间构成丝杆滑块机构。螺纹牙型为具有自锁性的三角形,可确保滚轮与电线之间有充足的压实力(正向接触力)和滚动摩擦力。在编码电机的驱动下,丝杆滑块机构可引导升降杆相对于滑台进行上下伸缩,进而带动上滚轮远离、靠近电线上表面。被巡检的电线位于上滚轮与下滚轮之间,当上滚轮靠近电线上表面时,2个滚轮的轴距不断缩小直至上滚轮、下滚轮压紧电线,实现压线功能。

图5 压线装置结构模型
编码电机的选型原则:在电机尺寸尽量小的前提下,输出的驱动力矩大于理论驱动力矩,同时保证转速不能太低,并具有自锁性。其中,单个编码电机的理论驱动力矩:
(2)
式中:m为电机需要推送的升降杆、上滚轮的总质量,kg;p为编码电机的螺杆导程,m;η为滑动螺杆效率(约32%);fv为当量摩擦系数,其计算公式为:
(3)
式中:f为螺杆与升降杆螺纹孔之间的摩擦系数;β为螺纹牙型的牙侧角,rad。
为保障螺纹具有自锁性,螺杆与升降杆螺纹孔的螺纹升角Ψ必须满足如下条件(自锁条件):
(4)
式中,φv为当量摩擦角,rad。
2.3 转向装置
如图6所示,转向装置主要包含舵机、连接件和板等部件。机器人由多个单元串联组成,需要舵机之间相互配合完成动作。
工程上常用的舵机有数字舵机与总线舵机,各自的特性如表1所示。为保证控制系统核心(主控芯片)与舵机之间接线方便且信号传递稳定,采用了总线舵机。每个转向装置包含2个相互垂直放置的总线舵机,用于构成蛇形臂单元的2个旋转自由度,以实现不同角度的转向。
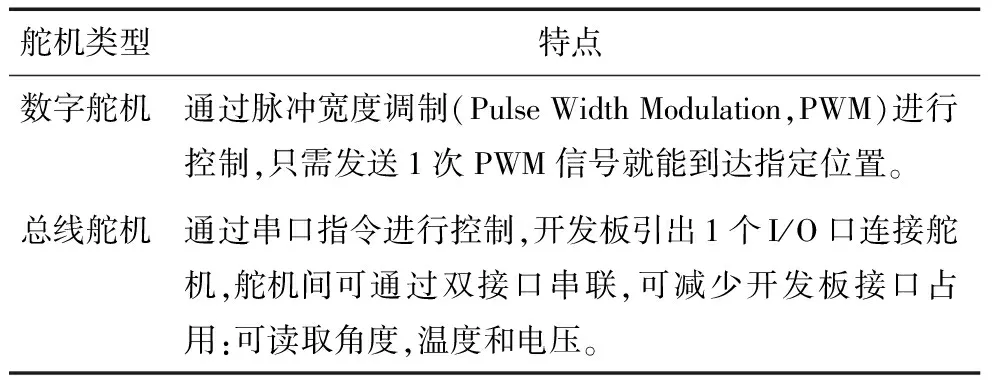
表1 2类舵机的特性比较
巡检机器人各单元的转向均由总线舵机来实现,在所有总线舵机的相互配合下完成机器人的姿势变换。
2.4 巡检功能部件
巡检机器人头部和尾部均可模块化地连接具有相关功能的巡检装置,如机械爪、剪刀、除冰器、绕线器等,用以实现清障、除冰、线缆外皮修复等功能。例如,若在机器人头部连接1个带摄像头的机械爪(见图7(a)),尾部连接1个带摄像头的陶瓷剪刀(见图7(b)),当线路上出现障碍物(飘带、风筝、树枝等异物)时,在人工的远程控制下,巡检机器人的头部机械爪或尾部陶瓷剪刀可做出响应,完成对障碍物的处理,实现清障功能。
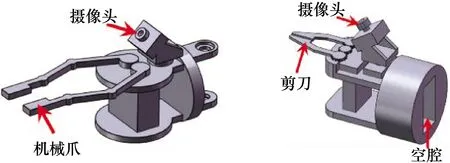
(a)带摄像头的机械爪 (b)带摄像头的剪刀图7 具有清障功能的巡检部件
3 运动仿真与避障分析
3.1 运动仿真
为了更好表达机器人的运动方式并检查机器人运动过程中的合理性,使用SolidWorks软件对巡检机器人进行运动仿真分析。如图8所示,利用3条空间曲线分别约束压线装置、行走装置、和连接件上某特定点的运动路径,并为升降杆添加距离配合约束,使各部件按照预定轨迹运行。另外,采用添加关键帧的方法对以上约束实施控制,确保约束在正确的时刻被施加或释放,如图9所示。
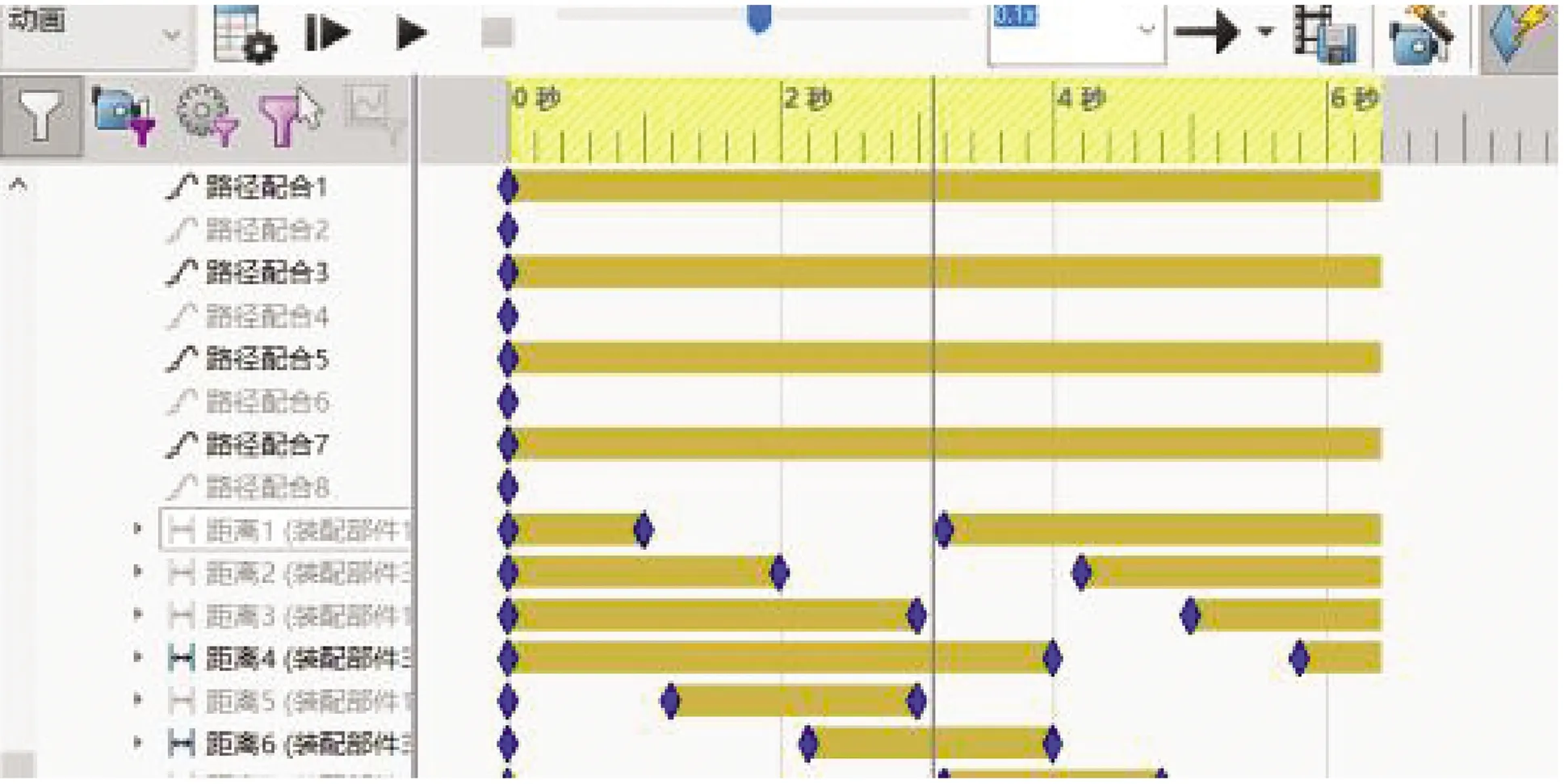
图9 采用关键帧控制运动配合的约束
以越障为例,巡检机器人的运动仿真效果如图10所示。
3.2 避障分析
基于运动仿真结果,对巡检机器人进行设计尺寸的调整,再通过监测升降杆的位移和总线舵机的角度变化情况后,可获取巡检机器人执行避障动作时的控制参数,如图11所示。同理,结合运动仿真,还可为机器人执行其他操作时提供直接的控制参数。

图11 避障操作流程
4 样机试制
4.1 主要控制硬件
机器人的巡检过程由地面操作人员以无线指令的形式控制完成:在发射端(地面端)的操作人员操控上位机发出控制指令,接收端(机器人端)接收发射端发出的数据并加以处理,最后再通过处理后的数据控制各电机的运行。为此,选用ATmega2560-16AU作为巡检机器人的主控芯片,以A4950双路电机驱动模块实现电机的驱动,并搭载了ATK-LORA-01无线通信模块。
为使巡检机器人接收端的布线简洁,自主设计了印制电路板(Printed Circuit Board,PCB),用于连接主控芯片、电机驱动模块和无线通信模块,如图12所示。

图12 接收端的PCB布局
4.2 样机测试
遵照设计方案,对巡检机器人样机进行试制和测试。为降低试制成本和装配精度,采用光固化3D打印技术对非标准零部件进行制作,其中承载较大处(如升降杆)选用了玻纤增强尼龙1010这类高强度材料。制作的原理样机如图13所示。

图13 实物样机
在室内环境下,对机器人功能进行测试。原理样机上电后,使用上位机对机器人的功能进行测试,其操作界面如图14所示。其中,STOP按钮用于发出停止命令,避障按钮用于发出跨越电线支撑架命令,换线按钮用于发出双电线换轨命令,复位按钮用于发出主控芯片复位命令。
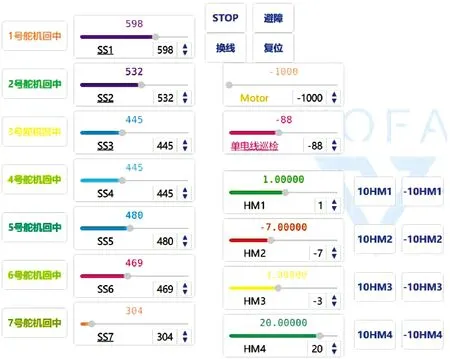
图14 上位机操作界面
图15展示了巡检机器人进行单电线巡检、跨越电线支撑架、双电线换轨的部分测试情况。测试结果显示,机器人单线巡检、避障、跨线等功能与预期基本一致,表明该机器人结构及程序设计合理,主体结构的功能符合设计要求。

(a)单电线巡检 (b)跨越电线支撑架 (c)双电线换轨 图15 巡检机器人样机测试情况
5 结语
本文采用仿生原理提出了一种蛇形仿生电线巡检机器人并完成了结构设计与试制,得出如下结论:
1)巡检机器人主要由行走装置、转向装置,压线装置构建的蛇形臂模块组合而成,可配置有巡检功能的相关部件。
2)巡检机器人的电机选型须满足一定原则。机器人在各总线舵机的相互配合下可完成姿势变换。
3)将三维模型与运动仿真技术运用在机器人的结构设计和避障分析中,为机器人执行避障等操作时提供了直接的控制参数。
4)结合控制硬件的选型和设计,试制了1台巡检机器人原理样机,配合上位机指令实现了对机器人的远程操控,功能测试结果基本符合要求。
猜你喜欢
军事文摘(2021年18期)2021-12-02
中国建筑金属结构(2021年10期)2021-11-07
意林(2019年17期)2019-10-07
冰雪运动(2019年2期)2019-09-02
中国特种设备安全(2018年10期)2018-12-18
上海包装(2018年8期)2018-09-05
电站辅机(2017年3期)2018-01-31
金色年华(2017年13期)2017-04-04
阅读(中年级)(2016年11期)2017-01-23
文体用品与科技(2016年7期)2016-06-15
