
基于Halbach阵列的爬壁机器人永磁吸附模块优化设计
2023-10-24 13:47孙天圣刘芳华曹永鑫
机械与电子 2023年10期
孙天圣,刘芳华,江 来,曹永鑫,陈 杨,缪 游
(江苏科技大学机械工程学院,江苏 镇江 212003)
0 引言
爬壁机器人是移动机器人领域的一个重要分支,但相比于普通的移动机器人移动空间更为广泛,爬壁机器人不仅可以在水平壁面进行移动,也可以在与水平面有角度的壁面甚至是悬垂壁面运动并进行作业[1]。爬壁机器人替代人工对大型油管、船舶等危险作业场景进行清洗、喷涂、除锈等工作,受到越来越多的人关注,而永磁体吸附方式则因为无需提供能源、吸附安全可靠等优点被广泛应用。永磁吸附爬壁机器人由运动方式的不同可分为履带式、轮式和足式,对比3种运动方式,目前研究较多的是永磁吸附轮式爬壁机器人,其具有运动灵活、作业效率高以及壁面适应性强等优点。
永磁吸附爬壁机器人主要依靠永磁吸附模块对金属壁面的吸附力,来达到爬壁机器人在有角度的壁面能够平衡作业的目的。因此,为了提高永磁吸附模块的吸附效率,以最大限度发挥吸附性能,需要对磁路进行优化设计,增加其单位质量所提供的吸附力。桂仲成等[2]设计了一种安装在轮式移动机构底盘上的耦合式的吸附模块,该吸附模块设置了一整块轭铁来引导磁感线,为爬壁机器人提供了较强的吸附力,但由于轭铁质量较大,反而降低了吸附模块的吸附效率;宋伟等[3]设计了一种弧形吸附模块,该模块采用2块弧形磁铁加入轭铁的方式来增大吸附力,并将吸附模块悬挂在驱动轮之间,使爬壁机器人整体结构更加紧凑,但还是存在吸附效率较低的问题;闫晨飞等[4]设计的变磁化方向单元组合式永磁吸附装置,由若干磁化方向不同的永磁体排列而成,形成环形磁路,相比于Halbach阵列,大大提高了吸附效率,但吸附装置永磁体排列密集[5-6],且磁化方向较多,加工制造困难。
结合永磁轮式爬壁机器人的优点和Halbach单侧聚磁能力强的特点,本文设计新型弧形永磁吸附模块,介绍其基本结构及工作原理,采用ANSYS Maxwell对其吸附单元的磁感应强度和吸附力进行仿真计算[7],研究不同结构参数对其吸附性能的影响,以此来优化吸附单元结构参数,从而提升吸附效率。
1 永磁吸附模块结构设计
Halbach阵列是一种新型永磁体排列方式,最早是由美国Klaus Halbach教授提出。它将不同磁化方向的永磁体按照一定的顺序排列,使得阵列一边的磁场显著增强而另一边显著减弱[8-9],且很容易得到在空间上较理想正弦分布的磁场。
本文设计了新型弧形永磁吸附模块,如图1所示。
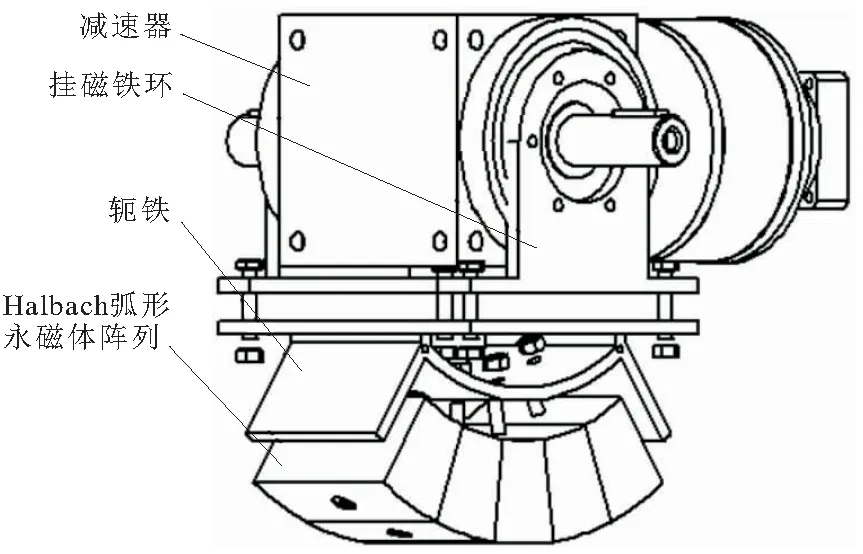
图1 新型弧形永磁吸附模块
图1中,新型弧形永磁吸附模块是由挂磁铁环、轭铁和Halbach弧形永磁体阵列等结构组成,其Halbach弧形永磁体通过螺栓螺母与轭铁固连,轭铁和Halbach弧形永磁体阵列共同组成了磁吸附单元,为整个爬壁机器人提供吸附力。挂磁铁环固定在减速器两端与下方的轭铁连接,使磁吸附单元稳定悬挂并与金属壁面保持稳定气隙值。相比于传统的Halbach永磁阵列,增加的轭铁贴合在弱磁侧,不仅能够固定弧形永磁体,而且能够引导弱磁侧的磁感线,减少磁场泄漏,提高吸附效率。
钕铁硼(NdFeB)是目前磁性最高的永磁材料,主要原料有稀土金属钕、金属元素铁、非金属元素硼,以及少量添加的镝、铌、铜等元素,具有高剩磁、高矫顽力、高磁能积等特点,因此有较强且稳定的磁性。本文选用N35钕铁硼磁铁作为吸附单元的永磁材料。其性能参数[10]如表1所示。
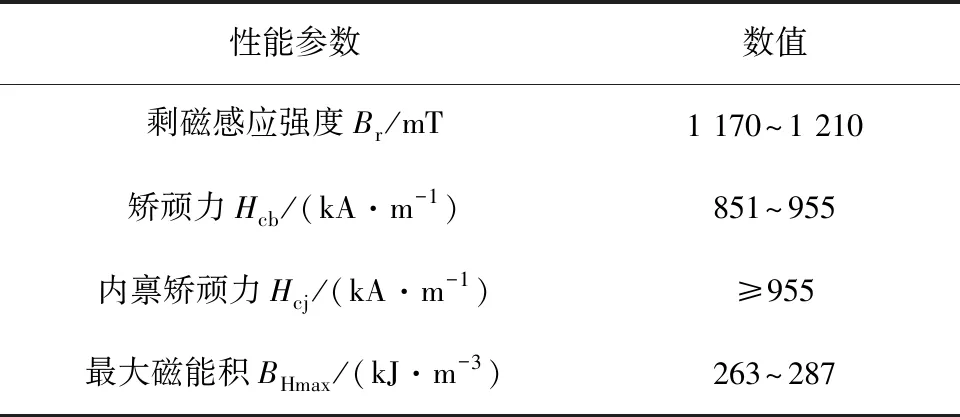
表1 N35性能参数
轭铁主要是为了减少磁感线的泄漏,引导磁感线,因此,轭铁的选用就是一般的导磁性能好、剩磁小的低碳钢,本文选用最常见的Q235钢作为轭铁材料。
2 吸附单元仿真模型建立及分析
2.1 吸附单元仿真模型建立
根据麦克斯韦电磁场理论,建立磁吸附单元理论模型,由麦克斯韦方程组推导得
(1)
式(1)中,有
(2)
Ax、Ay、Az为磁场强度在x、y、z方向上的分量。
吸附单元的优化主要体现在对吸附目标即金属壁面的吸附力的大小。Maxwell中采用的张力方法,当闭合面S处于均匀且各向同性的介质中时,作用在磁体上的吸附力F可用张力张量T的面积分来计算[11],即
(3)
S为永磁体周围的空气闭合面;n为面积dS的外法线方向的单位矢量;B为闭合面S上的磁感应强度;μ为空气的磁导率。
2.2 有限元仿真分析
永磁吸附模块中减速器和挂磁铁环等结构对吸附单元的吸附力没有影响,故进行有限元仿真分析时,本文将吸附单元以外的其他结构忽略,建立吸附单元的吸附力分析模型[12-13],如图2所示。
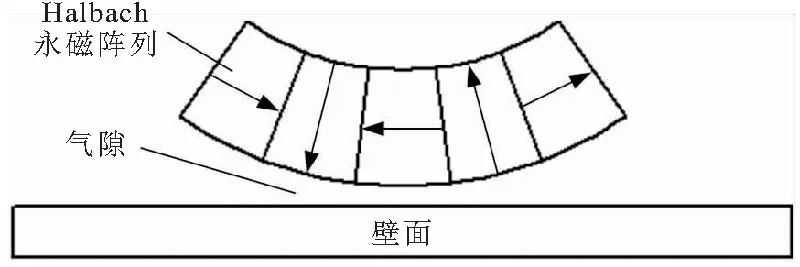
图2 弧形Halbach永磁阵列
吸附力分析模型中的弧形Halbach永磁阵列是由5块小的弧形永磁体组成,且通用Halbach阵列排列成弧形吸附单元,箭头的方向代表弧形永磁体的磁化方向,其中从左至右第1、3、5块弧形磁体充磁方向为弦宽方向磁化,第2、4块弧形磁体充磁方向为径向磁化,每块磁体的内径为105 mm,外径为150 mm,厚度为80 mm,角度为14°,每相邻2块磁铁的磁化方向相互垂直,且紧密贴合。壁面材料为Q235碳钢,尺寸为300 mm×200 mm×20 mm。
本文使用ANSYS Maxwell软件创建如图3所示的吸附单元模型,并且添加材料属性,设置边界条件[14],对模型进行仿真。
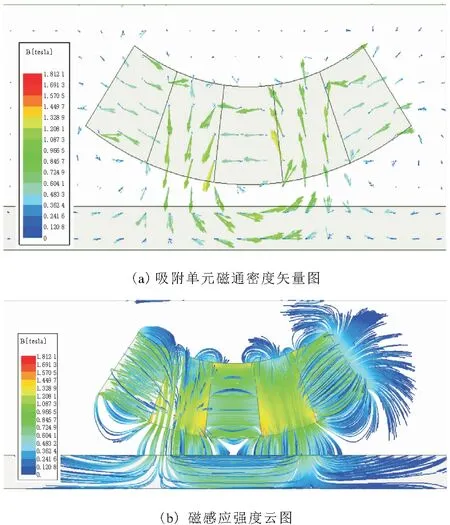
图3 吸附单元有限元仿真分析图
由图3可知,径向磁化的弧形磁体产生的磁感线,由空气气隙穿过金属壁面最后将再次回到磁体中,从而对壁面产生吸附力;弦宽方向磁化的弧形磁体主要为引导磁感线向金属壁面汇聚,使靠近壁面一侧的磁感线在磁体、气隙及壁面中形成回路,达到加强吸附力的目的。
在靠近壁面一侧的磁感应强度明显高于另一侧磁感应强度,形成聚磁效益,但从图3b可看出弱磁侧的部分磁感线并未形成回路,存在一定的磁场泄漏。为了解决弱磁侧磁场泄漏问题,在弧形Halbach永磁阵列弱磁侧增加1块轭铁,从而引导磁感线,降低磁场泄漏。
对加入轭铁后的吸附单元进行有限元仿真分析,磁感线强度云图如图4所示。
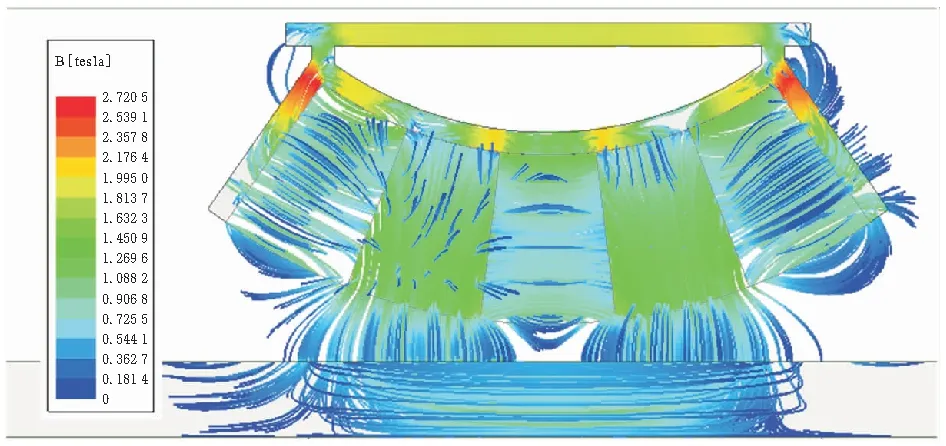
图4 加入轭铁后的吸附单元磁感应强度云图
由图4可知,在加入轭铁后,吸附单元弱磁侧的磁感线经过轭铁的引导,吸附单元磁感应强度增大,磁场泄漏情况得到明显改善。
3 磁吸附单元的结构参数分析与优化
本文设计的新型弧形永磁吸附模块中,吸附单元的尺寸参数如图5所示。
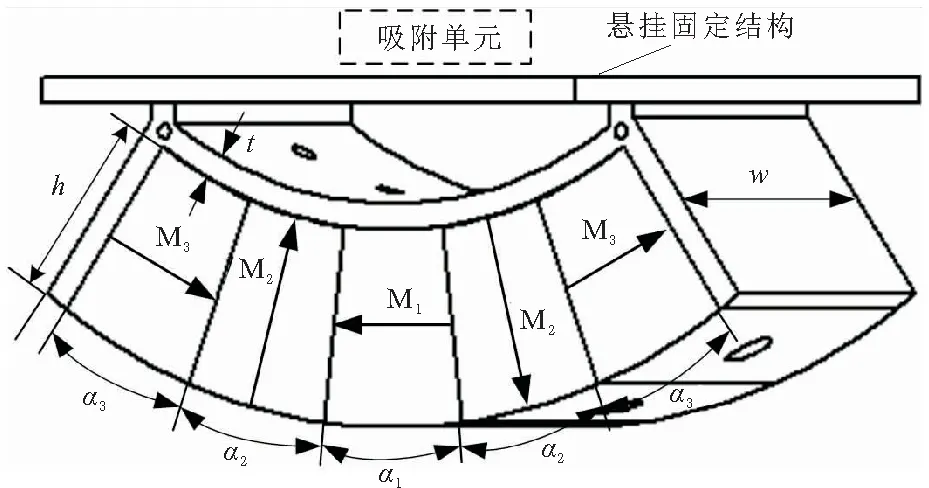
图5 吸附单元的几何尺寸
图5中,吸附单元主要由Halbach弧形永磁体阵列和1块贴合在弧形永磁阵列弱磁侧的轭铁构成,整个结构为对称结构,吸附单元为整个爬壁机器人提供吸附力。
为了研究吸附单元中Halbach弧形永磁体阵列和轭铁结构参数对吸附效率的影响,本文采用控制变量法,对轭铁和弧形永磁体的尺寸进行分析,研究其在不同尺寸下对整个吸附单元的吸附力的影响。吸附单元几何参数初始值如表2所示。

表2 各尺寸初始值
磁吸附单元结构优化目标是在已有的吸附单元结构上,通过优化吸附单元的尺寸使其吸附效率达到最大,即在一定的气隙值的情况下,使磁吸附单元的单位质量的吸附力最大,定义为
λ为单位质量吸附力;Fm为吸附单元在气隙值δ=δ0时的吸附力大小;G为吸附单元自身的重量。
吸附单元设计参数d= {α1,α2,α3,h,w,t},α1为弧形磁体M1的角度;α2为弧形磁体M2的角度;α3为弧形磁体M3的角度;h为弧形磁体的厚度;w为弧形磁体的厚度;t为吸附单元轭铁的厚度。
本文设计的弧形永磁吸附模块是为特定爬壁喷涂机器人提供吸附力,在永磁吸附单元下表面与金属壁面的气隙值为10 mm情况下要求磁吸附单元最小吸附力为1 500 N,以满足爬壁喷涂机器人负载30 kg的要求。
爬壁喷涂机器人的吸附单元优化模型为
利用ANSYS Maxwell的参数化扫描模块,对吸附单元的几何尺寸进行分析,结果如图6所示。
由图6a可知,在磁体M1的角度α1由0°开始逐渐增大到30°的过程中,吸附力随着角度α1的增大先增大再减小,在α1= 16°时达到最大值1 514.1 N,而后吸附力反而随着α1增大而减小;单位质量吸附力λ在α1= 11°时达到最大值,然后随着α1增大急剧下降。由此可得,磁体M1的角度α1存在一个临界值,达到此临界值前,吸附单元随着α1的增大而增大,而由于吸附单元是弧形磁体,因此α1一旦达到此临界值,随着角度α1的增大,磁体M2和M3部分与金属壁面之间的气隙值越来越大,反而损失了整个吸附单元的吸附力,单位质量吸附力也会迅速下降。由此可以得出结论:弦宽方向磁化的磁体对整个吸附单元贡献的吸附力有临界值,其主要的作用是引导磁感线的方向,而当其角度增大到某一临界值时,磁感线已趋于饱和,此时再增大角度α1并不能增大吸附力,因此导致单位质量吸附力迅速下降,吸附效率降低。
由图6b可知,在磁体M2的角度α2由0°开始逐渐增大到30°的过程中,吸附力随之逐渐增大,吸附力Fm由527 N增大到1 730 N;单位质量吸附力λ在α2= 12°时达到峰值361 N/kg,随后便缓慢下降。由此可知,磁体M2的角度α2对整个吸附单元的吸附力影响较大,且存在最大单位质量吸附力。结果表明:径向磁化的磁体的主要作用是产生磁吸附力,磁体M2的角度对吸附力影响较大,随着其角度的增大,吸附力也越大,角度达到14°后,吸附力增速降低且单位质量吸附力也在缓慢下降。
由图6c可知,磁体M3的角度α3与吸附力大小的关系基本上呈正相关,但是与单位质量吸附力的大小呈负相关。造成这种情况的主要是由于磁体M3位于Halbach弧形永磁体阵列的左右两端,与金属壁面的气隙值逐渐增大,导致单位质量吸附力越来越小,吸附效率逐渐降低。因此在满足所需的吸附力的前提下,适当减小磁体M3的角度有利于吸附效率的提高。
由图6d可知,随着磁体厚度h的增大,吸附力逐渐增大,在h= 40 mm后增长逐渐放缓;而单位质量吸附力λ在h= 28 mm时达到峰值387 N/kg后缓慢下降。结果表明:磁体在厚度方向也存在一个临界值,当磁体厚度达到临界值后,磁体对金属壁面的吸附力逐渐趋于稳定,表明从磁体进入壁面的磁感线逐渐饱和,从而导致单位质量吸附力逐渐降低,吸附单元的吸附效率降低。
由图6e可知,随着磁体宽度w逐渐增大,吸附单元的吸附力和单位质量吸附力都在逐渐增大,单位质量吸附力λ在w= 70 mm后增速逐渐放缓。图6e表明磁体宽度w与吸附力和单位质量吸附力基本上呈正相关关系,对这2个值贡献都较大。
由图6f可知,当吸附单元的轭铁厚度t增加,t<20 mm时,磁体的吸附力Fm随着轭铁厚度增大而增大,当t达到20 mm后,吸附力基本稳定在1 820 N附近;而轭铁厚度t与单位质量吸附力呈负相关关系。由此可以得出结论,在磁体的各项参数保持不变的情况下,增加轭铁装置能够明显增强磁体的吸附力,但轭铁的厚度达到一定值后,此时轭铁导通的磁感线饱和,吸附力达到峰值,由于轭铁采用的Q235材质密度较磁体密度大,对吸附力的提升贡献有限,故在设计轭铁厚度t时不宜过大,否则会降低吸附单元的单位质量吸附力。
根据以上结果及吸附单元优化模型,为了提高吸附效率,对吸附单元的几何参数进行优化并进行有限元分析,吸附单元优化前后的各项参数对比如表3所示。由表3可知,在符合优化模型的前提下,优化后的单位质量吸附力由300.09 N/kg提高到349.82 N/kg,提高了约16.57%,大大提高了吸附单元的吸附效率。
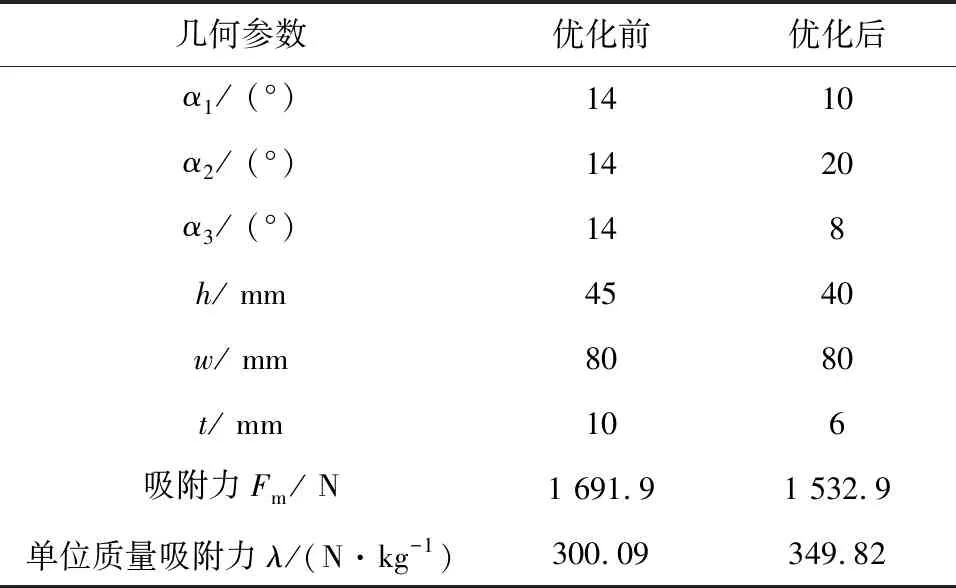
表3 吸附单元优化前后对比
4 结束语
本文针对轮式永磁吸附爬壁机器人,设计了一种基于Halbach阵列的新型弧形永磁吸附模块,并且增加了轭铁来引导磁感线,增强吸附单元的吸附能力。通过Maxwell软件对吸附单元模型进行参数化分析,得出以下结论:
a.基于Halbach阵列的弧形永磁吸附单元,磁化方向为弦宽方向的磁体对整个吸附单元起引导磁感线的作用,当其角度达到一个临界值后,引导磁感线的能力并不会随着角度的增大而增大,因此会导致吸附效率降低。
b.磁化方向为径向的磁体由于其磁感径向发散,从而穿过金属壁面,故径向磁化的磁体主要作用是产生吸附力,因此增大径向磁化的磁体角度可以提高吸附力和吸附效率。
c.弧形永磁体的厚度h达到一定值后,吸附力增长速度逐渐下降,吸附效率降低。而随着宽度w的增大,吸附单元的吸附力和吸附效率都在增大。适当厚度的轭铁t对吸附力的提升有一定效果。
猜你喜欢
船海工程(2022年6期)2023-01-02
力学学报(2022年6期)2022-07-10
中国特种设备安全(2021年12期)2021-04-26
机电工程(2020年10期)2020-11-04
物理之友(2020年12期)2020-07-16
石家庄铁道大学学报(自然科学版)(2020年4期)2020-02-22
中学生数理化·高二版(2016年12期)2017-02-28
广东石油化工学院学报(2016年6期)2016-05-17
应用技术学报(2014年1期)2014-02-28
海洋技术学报(2012年2期)2012-01-10
