
一种树干涂白机的结构及控制系统设计*
2023-11-03 08:49陈宇翔代文龙孔俊超陈梦强祝小康查章根张唯乐
南方农机 2023年22期
陈宇翔 ,代文龙 ,孔俊超 ,陈梦强 ,祝小康 ,查章根 ,张唯乐
(巢湖学院机械工程学院,安徽 合肥 238000)
树干涂白可提升林场整体美观性,防止和消灭病虫害,预防日灼和冻伤,促进树木健康生长[1-2]。人工手持刷筒实施操作树干涂白,工作强度大且近距离接触涂白剂容易对人体造成伤害[3-4]。唐磊生等[5]设计了一种包括驱动结构、石灰水勾兑灌装机构、轨道滑块机构和控制机构等的人机协作的树干涂白装置,并完成了树干涂白机的样机制作与实验。翟家怡[6]设计了一种含三自由度机械爪、移动式履带的可适应多种地形的可快速涂白树干的涂白机器人。目前关于树干涂白机的设计主要为专利或设计研发[7-8],设计整机尺寸大,导致成本高、适应性差。因此,十分有必要设计一种智能化、全自动的树干涂白机。课题组设计了一种包括传动系统、夹紧机构、喷涂机构、移动装置、驱动装置和电路控制系统的新型树干涂白装置,不仅可以大大提升工作效率、节省人力,同时结构简单、自动化程度高、清洁环保,具有一定的推广价值。
1 总体结构及工作原理
1.1 总体结构
树干涂白机主要由主运动夹紧机构、升降机构、喷涂机构和电路控制系统四个部分组成。图1为树干涂白机的结构示意图,包括电机、主动摇杆、机构连杆、从动摇杆(夹爪)、喷管、传动杆、脚轮、储存箱、气泵、带轮和车架等。夹紧机构由两个曲柄摇杆机构组成,升降机构为用于调节涂白高度的丝杠机构,喷管、气泵和涂白剂储存箱组成喷涂机构。
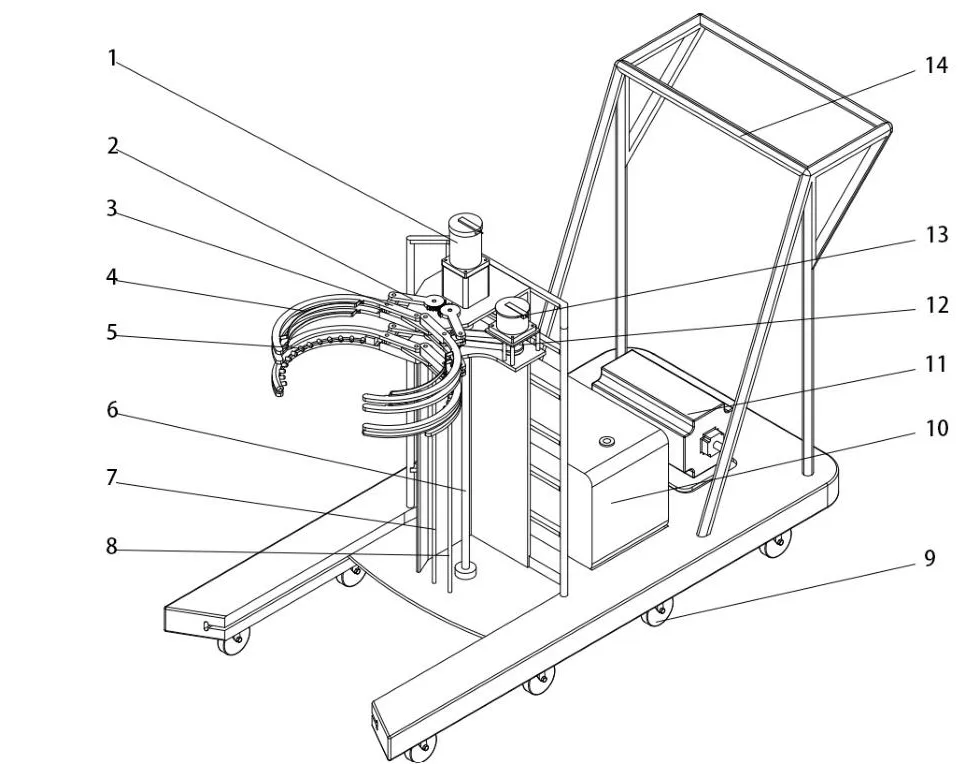
图1 树干涂白机的结构示意图
1.2 工作原理
将涂白机滚轮移动至待涂白的树干处,此时夹紧机构和喷涂装置的双摇杆机构处于开口状态且在最高工作位置。图2为夹紧喷涂装置结构示意图,通过单点激光测距模块对树木进行径向扫描,得出树木胸径数据并自动选取适合的喷涂模式。将涂白机推至工作目标处,对准待涂白的树干,即可完成涂白预备工作。
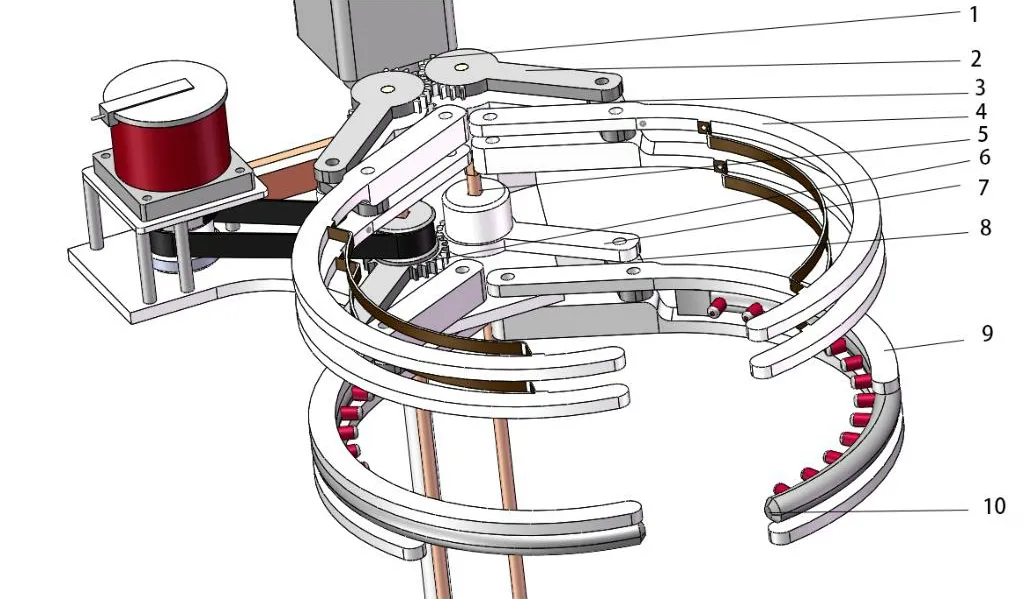
图2 夹紧喷涂装置结构示意图
单片机控制系统可以调节喷涂装置处的电动机,利用带传动传递动力,驱动涂白装置的主动摇杆进行单向摆动。通过主动摇杆处齿轮的啮合,控制涂白装置处两组双摇杆的动作,实现夹紧动作。夹紧机构与涂白装置两机构的主动摇杆处,利用同步传动轴,实现夹具和喷涂机构的夹紧动作一致。通过夹紧机构与涂白装置主动摇杆处的齿轮模数差异,实现二者从动摇杆夹紧部分的相对偏移,确保喷涂装置的喷嘴和树干表面之间有间隙,同时保证工作效率和设备安全性。
完成上述准备工作后,启动自动涂白工作模式。同时,利用丝杠螺母机构实现喷涂装置的水平方向移动,完成树干表面轴向方向的涂白工作。步进电机带动滚珠丝杠进而带动螺母副进行移动,从而带动喷涂机构所在的工作平台在垂直方向上移动,完成树干表面竖直方向的涂白工作。
2 关键机构的设计
2.1 传动装置设计
由于涂白机的工作环境对于传动速度以及传动精度的要求较低,属于一般工作场合,并且作为农用机械,工作环境较差,采用滑动丝杠螺母机构实现涂白机的传动工作更为合适。
2.2 夹紧装置设计
图3为双摇杆夹紧装置结构图,夹紧装置采用两组双摇杆机构实现夹紧动作,能在夹紧力要求不高的情况下满足使用要求,不会对设备自身以及待工作目标造成伤害。在两组机构的主动摇杆处利用齿轮啮合,保证两组机构的从动件摇杆实现同步动作,进而实现夹紧动作。

图3 夹紧装置结构图
2.3 喷涂装置设计
图4为双摇杆喷涂装置结构图,两条喷管分别与两组双摇杆机构固定连接,使得喷管和从动摇杆同步运动,实现喷嘴和待工作目标之间的相对距离控制。这不仅可以确保涂白剂的喷涂均匀,还可以避免喷嘴与树干接触。利用同步传动杆实现喷涂装置和夹紧装置动作同步,驱动带轮电机6带动皮带7运行,进而实现喷涂机构的运动。
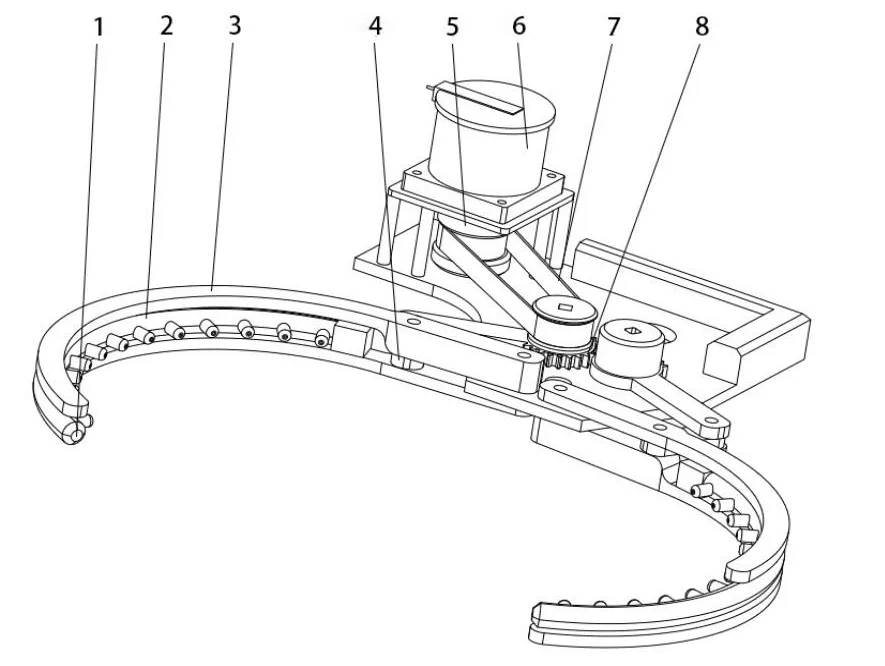
图4 喷涂装置结构图
2.4 涂白剂储存箱部分
图5为储存箱结构图,涂白剂料仓部分主要由料仓壳体、磁力搅拌器、小型高压气泵、进气管、涂白剂注入口、空气过滤网、磁性浮子等组成。涂白剂储存箱放置于装置的重心处,下方安装磁力搅拌器,用来防止涂白剂在储存箱内沉积。在箱体侧面竖直安放液面高度计和一干弹簧管,通过箱内的磁性浮子配合干弹簧管实现液面上下限位报警。当液面高,磁性浮子靠近上干弹簧管时,干弹簧管闭合并给单片机输入模拟信号,单片机对信号进行处理并显示在OLED屏幕上用于对数据的可视化。液面高度计由透明玻璃管上下与箱体连通,玻璃管液面即箱内液面。
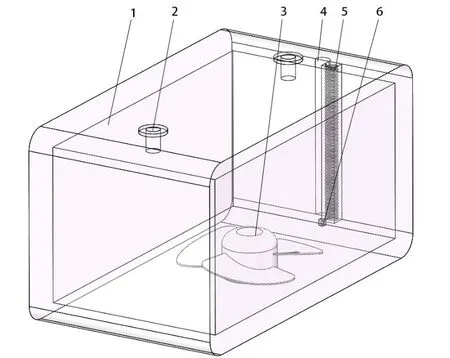
图5 储存箱结构图
涂白剂储存箱顶部有进气孔和注入口,高压气体由高压气泵通过进气孔泵入箱内。当喷口电磁阀得电路径为通路时,涂白液便可从喷口喷出。通过高压气泵和气压传感器的闭环,可实现箱内气压的自动化控制,不同的压力会使涂白液的喷出距离不同。
3 控制与充放电部分模块
3.1 模块简介
图6为自动控制各部件关系图,图7为初步电路设计及控制器图。控制与充放电部分主要由单片机、OLED屏幕、按键、锂电池、充电口及传感器组成。在机器对树干涂白的过程中,对于不同胸径的树木,无法实现自动适应树木进行最佳的涂白工作,因此会造成机器涂白的质量差、对涂白剂的利用率低等问题。针对此问题,课题组设计了四种自动涂白模式,从而实现对不同胸径树木的自适应涂白工作。涂白模式及其参数如表1所示,四种自动涂白模式分别调整机械手上下移动速度、出料喷口数量及压力等参数,使得不同径级的树木都可以均匀有效地被涂白剂覆盖。左右夹紧装置装有对射的单点高精度激光测距模块,当树木进入夹紧装置时,可以对树木进行径向扫描得到其胸径,并为其匹配最佳的涂白模式。

表1 涂白模式及其参数
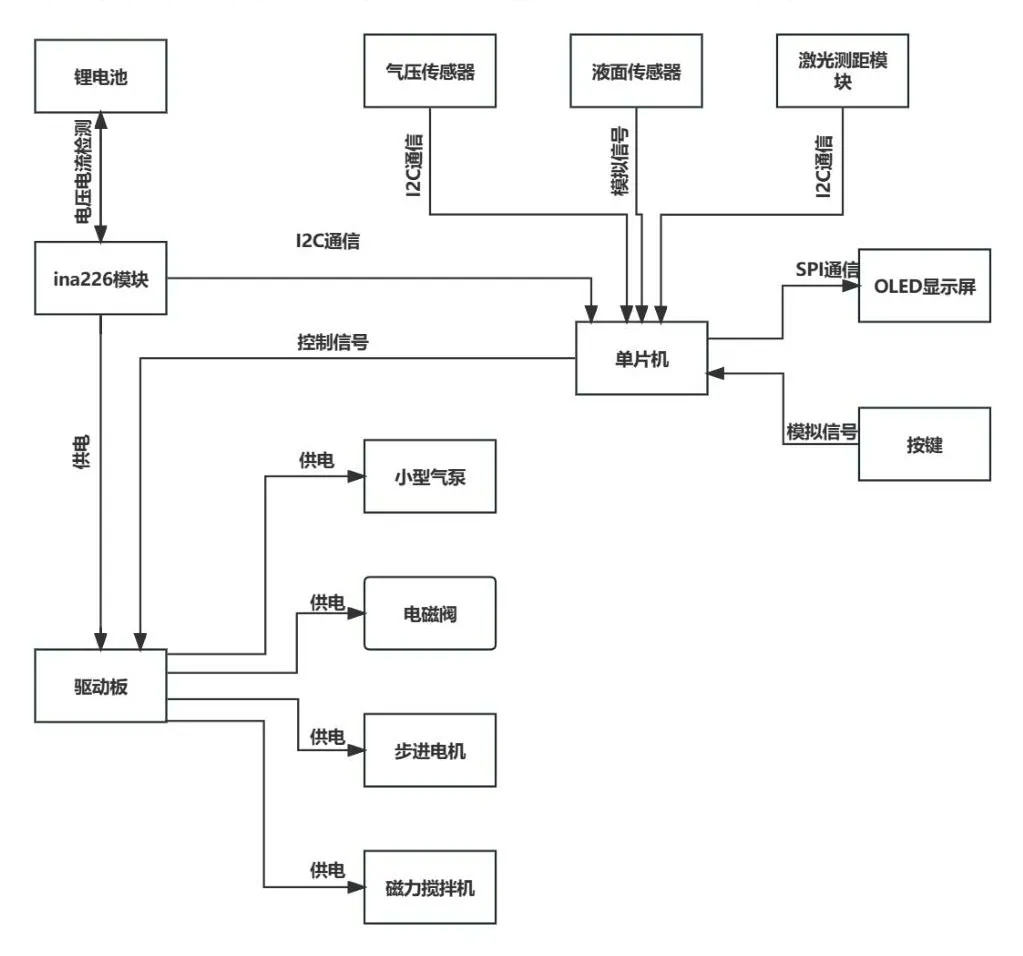
图6 自动控制各部件关系图
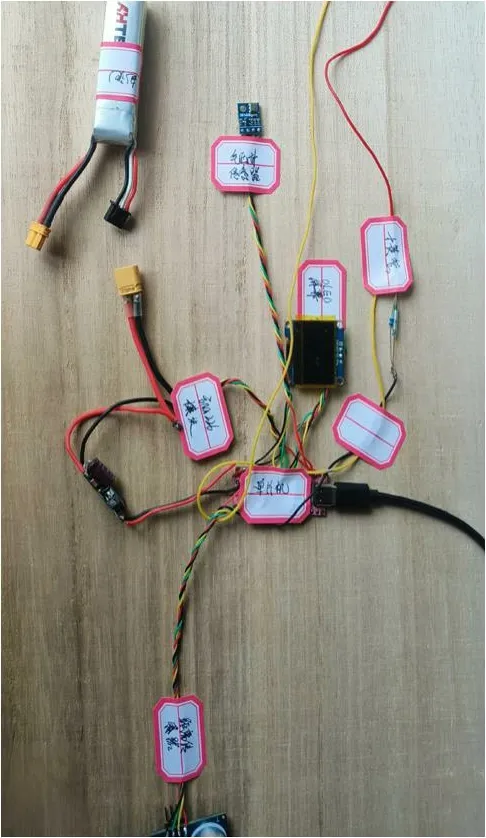
图7 初步电路设计及控制器图
该装置采用锂电池为各组件供电,并采用德州仪器ina226对电源电流电压数据进行高精度采集,使数据可视化。锂电池组设计成可拆卸式,当设备没电时,可从电池仓取下没电的电池换上有电的电池,并将没电的电池放入充电仓充电,提高作业效率。此外,还可以采用停机充电的方式进行补电,两种补电方式相辅相成,以便适应各种工作环境。在野外大型森林以及用电不方便的环境中,可以建立太阳能补电站,利用清洁能源,实现零碳排放。
3.2 相关程序控制模块及其机理
相关程序如下,程序中包含6个库。
#include <Adafruit_BMP085.h>
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <GyverINA.h>
#include <Stepper.h>
1)气压计传感器BMP280的库文件,气压计与开发板通过IIC通信。
2)Wire库是Arduino的一个标准库,它被用于I2C(Inter-Integrated Circuit)总线通信协议。I2C通信协议可以让多个设备通过两根信号线进行通信。Wire库包含了使用I2C通信协议进行数据收发的函数和方法,这些函数和方法可以帮助用户在Arduino与其他硬件设备进行可靠的双向数据传输。
3)Adafruit_GFX是一个Arduino库,用于在液晶屏幕上绘制图形。它提供了一系列用于像素级控制图形的功能函数,如画线、画圆、填充矩形等,并支持不同字体的渲染和显示。使用此库可以让开发者轻松地在液晶屏幕上绘制出各种复杂图形和图标,并且占用的内存和处理器负载非常小,适用于单片机等资源有限的嵌入式平台。
4)Adafruit_SSD1306是一个针对SSD1306 OLED显示器的Arduino库。该库提供了一组用于控制和驱动OLED屏幕的函数,如绘制图形、刷屏、显示文本等。此外,还可以通过调节参数设置OLED显示器的亮度、对比度、旋转角度等,以适应不同的应用场景。使用Adafruit_SSD1306库可以轻松地操控OLED屏幕,并且具有良好的兼容性和可扩展性,其在嵌入式设备中得到广泛应用。
5)GyverINA是双向电流/功率监视器芯片ina226的库文件。
6)Stepper是Arduino的标准库之一,用于驱动步进电机。步进电机相对于直流电机拥有较高的精度和控制可定性,在很多领域得到广泛应用。Stepper库提供了一组函数,可以让用户轻松控制步进电机的旋转速度、方向和步数等参数,配合其他电子元器件(如感应开关、旋钮等)可以实现更为复杂的控制功能。在使用Stepper库时,需要根据具体的步进电机型号以及对其控制参数的需求来设置库中的相关参数,以便实现理想的运动轨迹和步进精度。通过距离传感器对树木半径进行测量,从而选择不同的喷涂模式。
4 主运动机构的力学特性分析
4.1 力学特性分析
树干涂白机主运动机构为双摇杆机构,力学特性分析包括运动特性、惯性力和惯性力矩分析,图8为主运动机构的受力示意图,图9为机构分离体的受力示意图。
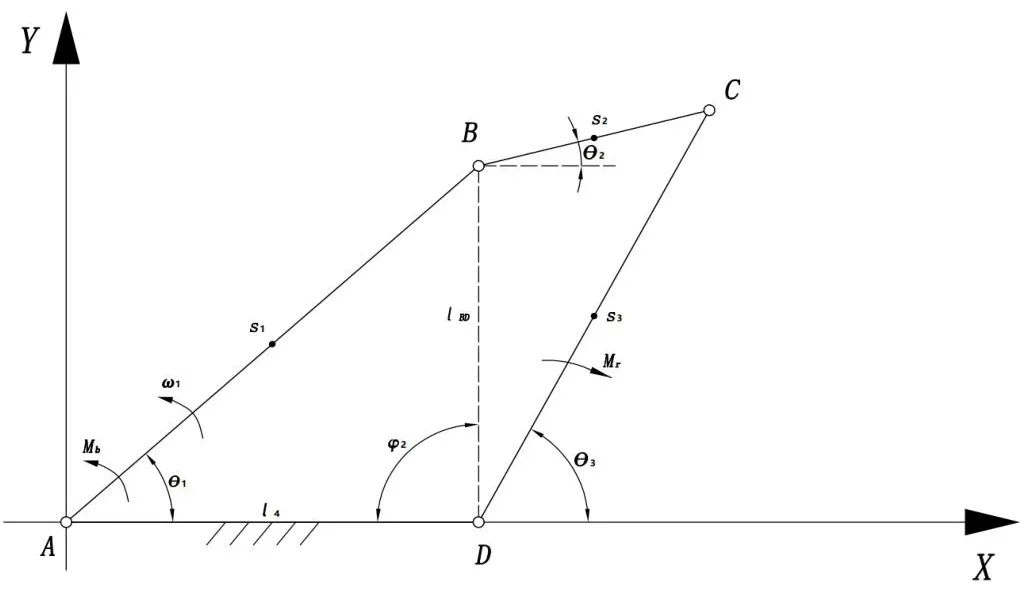
图8 主运动机构的受力示意图

图9 机构分离体受力示意图
4.1.1 惯性力分析
主动摇杆AB的质心为S1,连杆BC的质心为S2,从动摇杆CD的质心为S3。主动摇杆AB上作用有驱动(平衡)力矩Mb,从动摇杆CD上作用有工作阻力矩Mr。
4.1.2 平衡方程
每处运动副所产生的反力分解为沿x轴、y轴方向的两个分力以及一对未知的平衡力矩Mb、Mr[9-10]。
4.2 机构受力特性分析
夹紧机构的夹紧端所受到工作阻力矩为5 N·m时,即可完成夹紧动作,得出如图10所示的受力特性曲线图。机构尺寸优化后,各个杆件在摇杆摆角范围为15°~60°的工况中所受到的运动副反力较小(50 N以下),主动摇杆处所需要施加的驱动力矩不高(5.8 N·m~9.6 N·m)。采用强度适中、质量较轻的材料充当杆件材料即可满足杆件的强度要求,同时采用体积较小、所需扭矩不高的电机即可满足该摇杆机构的驱动要求,机构整体满足设计要求。
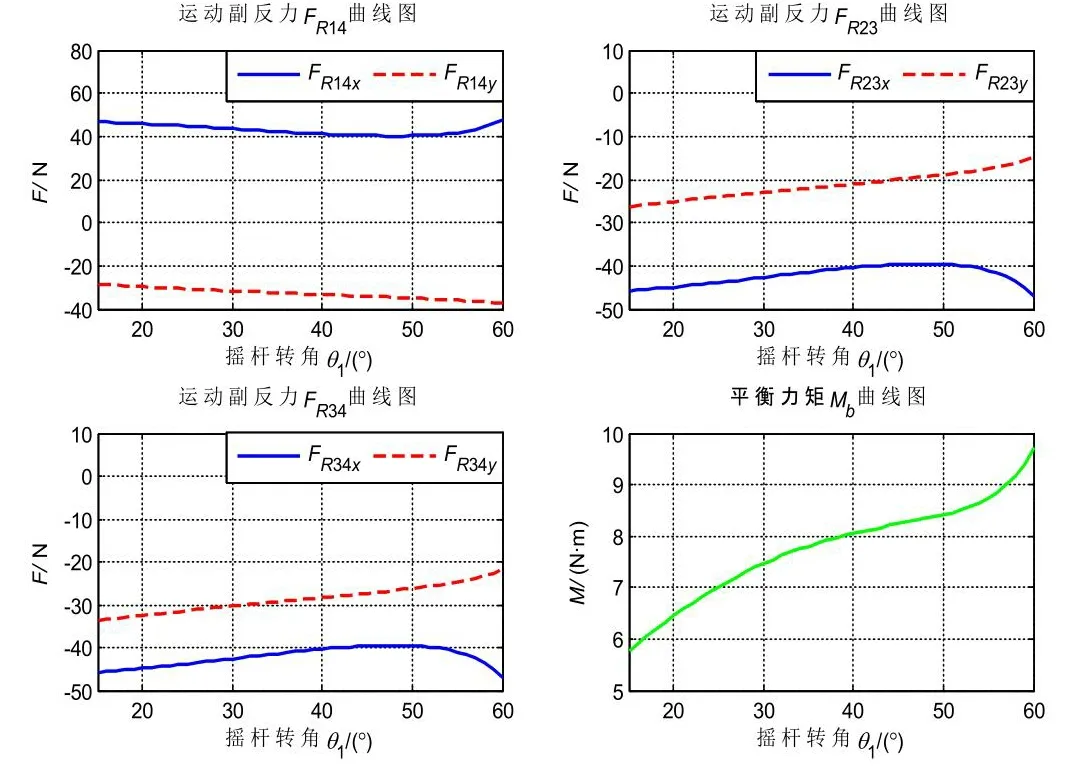
图10 机构受力特性曲线图
5 结论
1)本文设计了一种新型结构的树干涂白装置,它包括传动系统、夹紧机构、喷涂机构、移动装置、驱动装置和电路控制系统。传动系统为丝杠螺母机构,气缸活塞夹紧机构与双摇杆夹紧机构相配合可以在固定机器工作位置喷涂的同时,保证树木喷涂范围完整,均匀涂白且涂白剂消耗量小。
2)左右夹紧装置装有对射的单点高精度激光测距模块,树木进入夹紧装置时可以对树木进行径向扫描得到其胸径,并为其匹配最佳的涂白模式。调整机械手上下移动速度、出料喷口数量及压力等参数,使不同径级的树木都可以均匀有效地被涂白剂覆盖。
3)机构尺寸优化后,各个杆件在摇杆摆角范围为15°~60°的工况中所受到的运动副反力较小(50 N以下),主动摇杆处所需要施加的驱动力矩不高(5.8 N·m~9.6 N·m)。采用强度适中、质量较轻的材料为杆件材料即可满足杆件的强度要求。
猜你喜欢
电脑爱好者(2022年5期)2022-05-30
军事文摘(2021年16期)2021-11-05
南方农机(2021年3期)2021-02-07
农技服务(2020年11期)2020-12-16
今日农业(2020年19期)2020-12-14
湖北农机化(2020年17期)2020-11-02
东坡赤壁诗词(2019年1期)2019-04-30
延河(下半月)(2017年6期)2017-11-13
小猕猴学习画刊(2017年1期)2017-02-17
小猕猴学习画刊(2017年1期)2017-02-17
