
基于三维激光扫描技术的大坝安全监测方法研究
2023-11-09 03:09郜士彬沈宗觊保振永
水利技术监督 2023年10期
郜士彬,王 康,沈宗觊,保振永
(中国电建集团昆明勘测设计研究院,云南 昆明 650000)
1 研究背景
目前我国注册备案大坝共663座,超过5100亿m3的库容,坝高超过100m的有152座,超过200m的有17座,主要有重力坝、土石坝、拱坝和混合坝等类型,大坝安全监测贯穿大坝建设、竣工运营、维护各个阶段。传统的变形监测方法以“点”式监测为主,仪器多用全站仪、GNSS、经纬仪等。传统手段测点精度高,但是获取局部点位信息,对于复杂地形的变形监测,布点数量增加,监测成本增加,有些滑坡地形非常危险,不便于布设监测点,加上监测点很容易随着变形体破坏。葛山运[1]、罗江运用GPS/BDS组合定位方法在大坝安全监测上,谭林使用三频GPS组合精密单点定位技术(PPP)进行大坝变形监测方法研究,崔鹏飞利用GNSS和测量机器人组合的方法进行大坝安全监测研究,郭保、李小伟等研究了多基站GNSS自动化大坝变形监测方法,刘千驹研究了小波函数提高大坝变形监测数据质量中的应用,李明使用精度优于传统统计模型的BP网络预测模型来表征变形趋势,孙志豪利用SBAS监测方法对大坝不同区域的沉降量与变形速率进行监测。近年来,开始研究基于三维激光扫描技术的变形监测方法。通过非接触的方式进行获取变形体表面的点云数据和影像数据,该方式可以快速获取海量变形体的连续点云数据,梁冲、李庆松等提出了一种机载LIDAR和多波束系统组合方法获取水上水下地形数据的解决方案,吴运通、范泯进、杨传训等研究了三维激光扫描技术在大坝变形监测上的应用方法。
基于三维激光扫描技术的大坝安全监测方法,是通过不同周期观测,进行点、线、面多期数据对比分析,从而达到监测分析变形体整体的一个变形趋势和规律,制定相应的预防和整改措施。本文提出使用三维激光扫描技术,定期对土石大坝进行扫描获取点云数据,利用Hausdorff距离法进行多期点云变形分析,运用色谱统计变形量。本文结合糯扎渡项目研究三维激光扫描技术在大坝变形监测中的应用效果。
2 技术路线
大坝变形是一个缓慢而持续的过程,需要对大坝变形监测制定最佳扫描方案。本文采用澳大利亚MAPtek生产的I-SITE8810三维激光扫描仪,在大坝L3-L8测线进行三维激光扫描设站点布设,以电厂GNSS及视准线监测的工作基点作为激光扫描监测控制点。三维激光扫描仪观测应选择天气良好情况下进行,将三维激光扫描仪依次分别架设在观测墩上,在观测期内对大坝迎水面和背水面边坡及两岸边坡进行三维扫描观测,如图1所示。三维激光扫描主要技术流程:(1)控制测量,包含选点、埋设、观测、计算、检查及整理成果;(2)外业数据采集,包含踏勘、准备、扫描站点布设、三维激光扫描、数据下载存储、外业资料整理;(3)点云数据拼接,包含点云坐标转换、点云配准、平差报告、点云导出和数据整理等;(4)点云数据处理,包含点云去噪、点云分类、点云抽稀和分割等;(5)三维模型建立,包含构建三角网、漏洞编辑处理、拓扑编辑、检查和成果整理等;(6)纹理贴图,包含照片采集、匀光匀色、贴图、检查和成果归档。

图1 大坝三维测站布设图
2.1 布设站点
测站点的选择是三维测量中非常重要的环节,测站点的坐标精度直接影响了三维测量数据的质量精度,要选择密度均匀、距离适中的高精度控制点或者长时间监测的基点观测墩作为三维激光扫描仪的设站点。2018年三维扫描测量项目为了能够和2016年的三维扫描测量数据良好衔接,所以2018年两期测站点的设置与2016年的三维扫描设站点一样,共设测站点10个。如图2所示。

图2 大坝扫描工作示意图
2.2 数据采集
数据采集严格遵循以下步骤作业:(1)在坝体部分表面点上安装标志牌,并用全站仪精确获取坐标;(2)坝体及扁钢扫描距离控制在100m范围内;(3)同一测站,为确保数据质量的可靠性,采用反复观测两测回的方式进行;(4)在后视点的选择过程中,找准相对较远的控制点,以减少后视误差;(5)选取大气稳定,日照适中的观测时间进行点云数据采集,保证了点云精度质量及色彩质量;(6)未在逆光条件下进行观测;(7)根据三维激光扫描仪检验的结果进行精度验证和误差改正。
2.3 测站精度验证
测站精度主要分为内符合精度和外符合精度。
内符合精度主要指同一测站不同时刻测量同一目标时,两期数据间的内符合程度。在本项目中,采用L5-GTP-08_HY_C8L测站所观测的同期两测站数据进行内符合精度的评定验证,截取测站相同观测范围的两期数据点云文件,通过数据过滤分类,得到坝面观测点云文件,在同一位置切取部分点云进行建模分析,如图3—4所示。

图3 L5-GTP-08_HY_C8L02点云数据

图4 L5-GTP-08_HY_C8L01点云数据
采用专业数据处理软件进行点之间的分析对比如图5—6所示。
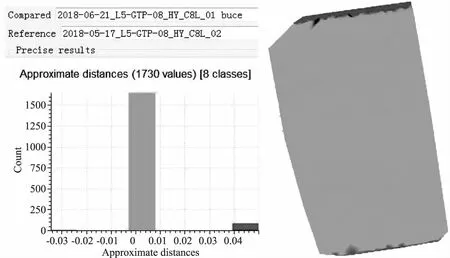
图5 比较结果(横坐标为m,纵坐标为点数)

图6 比较结果(横坐标为m,纵坐标为点数)
通过点云数据分析,绿色柱子为两组数据分析结果,统计数据集中在±8mm以内,红色数据由于该位置无重叠点云数据所致,整体内符合精度可以达到±8mm以内。
外符合精度主要指不同测站同一时刻测量相同目标时,两站数据间的相互吻合度,保证同期观测数据成果的正确性。在本次作业的过程中,采用L6GP07_HY_C4L_01测站及L6GP08_HY_C4L_01测站截取点云模型观测数据,在两站观测数据中,截取同一位置的坡面的点云数据,分别进行坐标转换、表面模型构建,进行精度分析。
选取的点云数据距离测站较近,根据误差传播规律,测点范围约100m的条件下,点云数据外符合精度优于±10mm,由分析成果可知,各测站外部符合精度较佳,。
综上所述,通过数据分析及评定:采用TM30/RTK实测基点,三维激光扫描仪所测100m范围内的点云数据精度优于±10mm。
2.4 数据预处理
数据预处理主要包括测站数据配准拼接、点云滤波分类和大坝分析模型构建3个方面。
点云数据配,准根据测站定向法进行拼接,每个测站进行测站点坐标、定向方位角、温度、气压等参数的输入,软件自动进行测站配准,将所有配准后数据进行融合处理。
点云滤波分类,将点云数据中除大坝以外的部分点云进行分类、提取,包括扁钢、护栏、观测墩、观测房、建筑、花台、过道、交通指示牌等。
大坝模型构建,将配准、分类完成的点云数据构建大坝mesh模型,划定变形分析范围,多期数据按照分析范围进行处理。如图7—8所示。
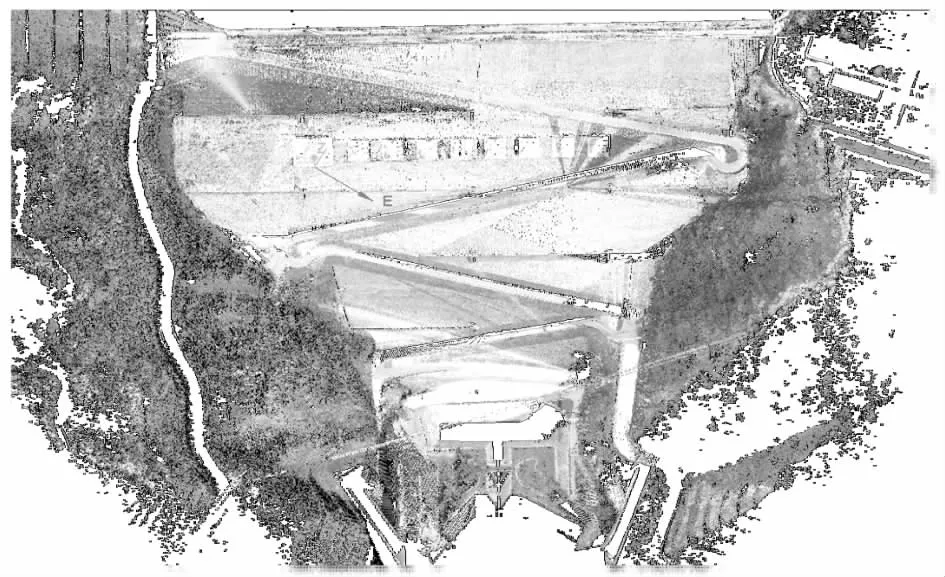
图7 大坝三维扫描数据

图8 三维分析模型构建
2.5 变形分析
本文采用Hausdorff距离法进行多期点云的变形分析,Hausdorff距离是描述两组点云之间相似度的一种量度,是两组点云之间差异的一种表达。假设有两个点云集合A={a1,…,an},B={b1,…,bn},则这两个点云集合之间的Hausdorff距离定义为:
H(A,B)=Maxa∈A{minb∈B{d(a,b)}}
(1)
式中,a、b—集合A与集合B中的点;d(a,b)—a与b之间的欧式距离(Euclidean距离)。
Hausdorff距离度量了两组点云间的最大不匹配程度,距离越大,则表示匹配程度越差,反之,则表示匹配程度高。
使用开源的Cloud compare点云处理软件进行多组点云的Hausdorff距离法变形分析,从整体上分析大坝变形趋势。
3 工程实例
通过对糯扎渡电站2018年两期数据和2016年两期数据选取相同分析范围内点云,将2016年1期数据作为大坝变形分析的首期数据,剩余的3期数据构建模型与其进行变形分析,使用Cloud compare点云处理软件进行Hausdorff距离法叠加对比分析,得到分析成果,分别是2016年2期和2016年1期的数据比较结果图、2018年1期和2016年1期的数据比较结果图、2018年2期和2016年1期的数据比较结果图,如图9—12所示。图中所有表格横坐标单位为m,纵坐标单位为点个数。4期变形值数据见表1。

表1 4期大坝扫描数据变形值统计表

图9 2016年2期—2016年1期大坝变形分析成果图

图10 2018年1期—2016年1期大坝变形分析成果图

图11 2018年2期—2016年1期大坝变形分析成果图
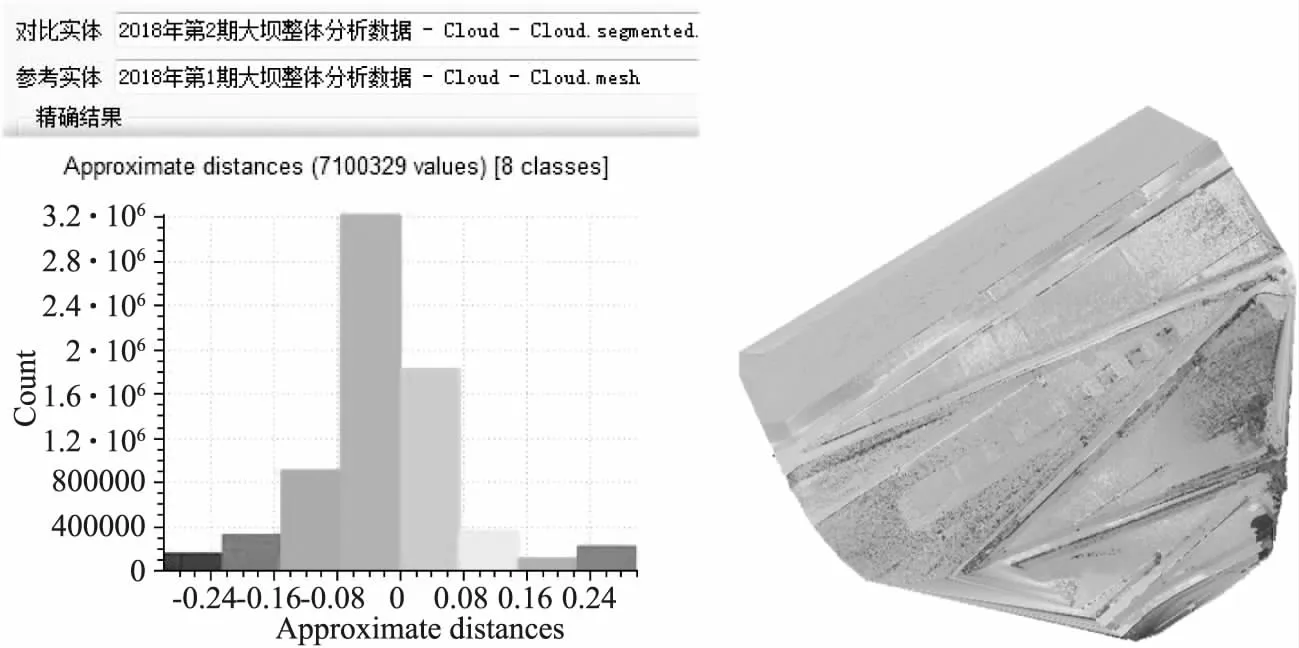
图12 2018年2期—2018年1期大坝变形分析成果图
从这4期数据整体分析成果来看,大坝中心轴线(坝顶路面)是趋于下沉的,从2016年2期、2018年1期和2018年2期的数据比较结果图中可看出,比较差值从正到负变化,绝对值逐渐增大,变化量由最初的8cm以内,到10cm以内,到2018年2期观测的时候,变化量最大的地方有16cm。
4 结语
本文结合糯扎渡三维扫描项目,定期对大坝进行扫描获取了4期点云数据,利用Hausdorff距离法进行多期点云变形分析,运用色谱统计两期之间的变形量,本文可以得到以下结论。
(1)三维激光扫描测站点位选择合理,点位尽可能少,设站越多,数据配准误差越大。
(2)采用了多种方法对点云数据精度进行验证,保证了数据采集结果的精度及正确性,本次工作中,地面三维激光扫描整体数据精度≤10mm。
(3)三维激光扫描技术可以很好地应用在表面相对平整的土石坝进行变形分析,Hausdorff距离法可以很直观地表现出大坝整体的变形位置及变形量,达到了对大坝整体的变形趋势和规律进行监测。
猜你喜欢
地理空间信息(2022年11期)2022-11-26
电子制作(2019年14期)2019-08-20
国际呼吸杂志(2019年1期)2019-01-28
测绘学报(2018年10期)2018-10-26
百科知识(2018年6期)2018-04-03
城市勘测(2018年1期)2018-03-15
中国自行车(2017年1期)2017-04-16
故事会(2016年21期)2016-11-10
中国三峡(2013年11期)2013-11-21
地理空间信息(2013年4期)2013-09-28
