
基于模型设计的半导体激光器电源控制系统
2023-11-10 01:19江海河
山西大同大学学报(自然科学版) 2023年5期
窦 垚,江海河
(1.安徽建筑大学机械与电气工程学院,安徽合肥 230009;2.中国科学院合肥物质科学研究院健康与医学技术研究所,安徽合肥 230031)
常规的开发半导体激光器电源控制系统的流程主要是单线式流程[1],根据设计要求,软硬件各自制定设计方案。若软硬件联调过程中出现错误,彼此又回到所设计的部分重新测试与验证,造成开发过程中软硬件关联性不强。最为重要的问题是,设计要求的变更以及设计参数模糊化导致代码的复杂度和规模倍增[2-3]。为此,提出一种V字模式开发方法代替人工编程开发控制系统,主要包括系统定义、结构设计、快速原型、自动生成代码、软硬件在环测试、功能测试、现场测试七个环节[4]。根据需求进行结构设计搭建模型,后面任一环节出现问题都可以在模型基础上修改,不需要软硬件分别测试,大幅度地提高了工作效率[5-6]。近年来,随着电控系统技术的快速发展,这种基于模型设计开发控制系统的方法逐步得到使用和推广,特别是在汽车制造[7]、太阳能光伏、航空航天等领域[8-9]。
1 电源控制系统开发流程
对系统进行分析,设计环路控制,建立Simulink模型,对环路控制部分进行软硬件在环测试。测试通过后配置代码生成模型,生成代码经过编译后,烧录进处理器中进行实验。控制系统开发流程分为4个步骤:
步骤1:设计环路控制,搭建Simulink 仿真模型,完成控制算法和被控对象的建模,并进行实时仿真。
步骤2:对控制算法模块进行SIL/PIL 测试,验证对控制算法模块使用Simulink 工具自动生成代码的可运行性。SIL(Software in the Loop)测试是在PC端测试生成代码的可运行性。PIL(Processor in the Loop)测试是在实际目标处理器上运行代码进行测试,验证生成的代码在目标处理器上的可运行性。
步骤3:配置代码生成模型,最终面向的是DSP28335 芯片,需要配置ADC 模块接口及EPWM模块输出。生成的代码经CCS 编译后烧录进目标芯片中去,脱离Simulink软件。
步骤4:连接处理器与硬件电路板,通过示波器观察输出,完成实验。
2 闭环仿真模型搭建
2.1 环路控制设计
环路控制的核心在于补偿网络的设计,补偿网络的选取直接影响整个电源系统的输出精度和动态特性,因此需要设计合适的补偿网络。设计的电源控制电路在前级输入在12~15 V 之间,后级输出范围为4~6 V,采用电压电流双闭环补偿网络。
2.1.1 电流内环补偿网络设计
电流内环控制对象为主电路,采用单极点-单零点补偿网络对电流内环进行补偿。单极点-单零点补偿网络的传递函数为
式中:Kc为电流补偿网络最大增益;Wz为低频零点;Wp为高频极点。对于降压主电路,其系统穿越频率,其中fs为开关频率100 kHz,D为最小占空比0.27,故其穿越频率fc=58.98 kHz。低频零点根据加入补偿后的开环传递函数bode 图进行调整,最终选取为14 kHz,高频极点设置为开关频率100 kHz。代入参数得到电流内环补偿网络传递函数Gc为
加入电流内环补偿网络后的系统开环传递函数T为
2.1.2 电压外环补偿网络设计
设计电压外环时,其被控对象变成了加入补偿网络后的整体闭环。由于整体闭环存在两个零点,三个极点,故电压外环补偿网络选取为双极点-双零点补偿网络。双极点-双零点补偿网络的传递函数为
式中:Gv为电压补偿网络传递函数;Kv为电压补偿网络最大增益;wz1、wz2为补偿网络传递函数零点;wp1、wp2为补偿网络传递函数极点。根据设计要求,可计算得出电压外环补偿网络的零极点:①=15.6 Hz,抵消负载极点;②加入电流内环补偿网络后计算系统闭环传递函数得出其零点为10086kHz、13.88kHz,极点为40.453 kHz、19.095 kKz,其中10 086 kHz 远大于100 kHz,忽略其影响并舍去,且40.453 kHz为一对共轭复根,故wz2=19.095 kHz;③=4.7 kHz,抵消ESR零点;④wp2设置在开关频率处为100 kHz。此时系统开环传递函数Tw为
2.2 控制算法模型离散化
在Simulink搭建的模型补偿网络部分使用的是连续模块搭建,对于模型设计来说,需要对其进行离散化。在离散化传递函数的方法中,双线性变换法相对于其他离散化方法来说离散化后的bode图与未离散化的bode图更为接近。因此采用离散化法为双线性变换法。
将控制模块部分与主电路模块部分分开各自创建子系统模块,如图1。在Simulink 工具里选择模型离散化器(modle discretizer),对控制算法模块使用双线性变换法进行离散化。

图1 离散化控制算法模块图
3 模型设计的测试与实验结果
3.1 环路控制软件在环测试(SIL)
图2 为对离散化后的控制算法模块进行基础设置生成的软件在环测试SIL 模块与原系统连接的整体模型。软件在环测试(SIL)的属性设置为求解器选择Fixed-step(定步长)与discrete(no continuous states)(离散(无连续状态))。其次是硬件实现部分,在做软件在环测试时不需要连接硬件,因此硬件部分选择None。系统目标文件选择Ert.tlc,tlc 文件可以直接控制代码自动生成过程。验证部分启用可移植字长,生成SIL模块。
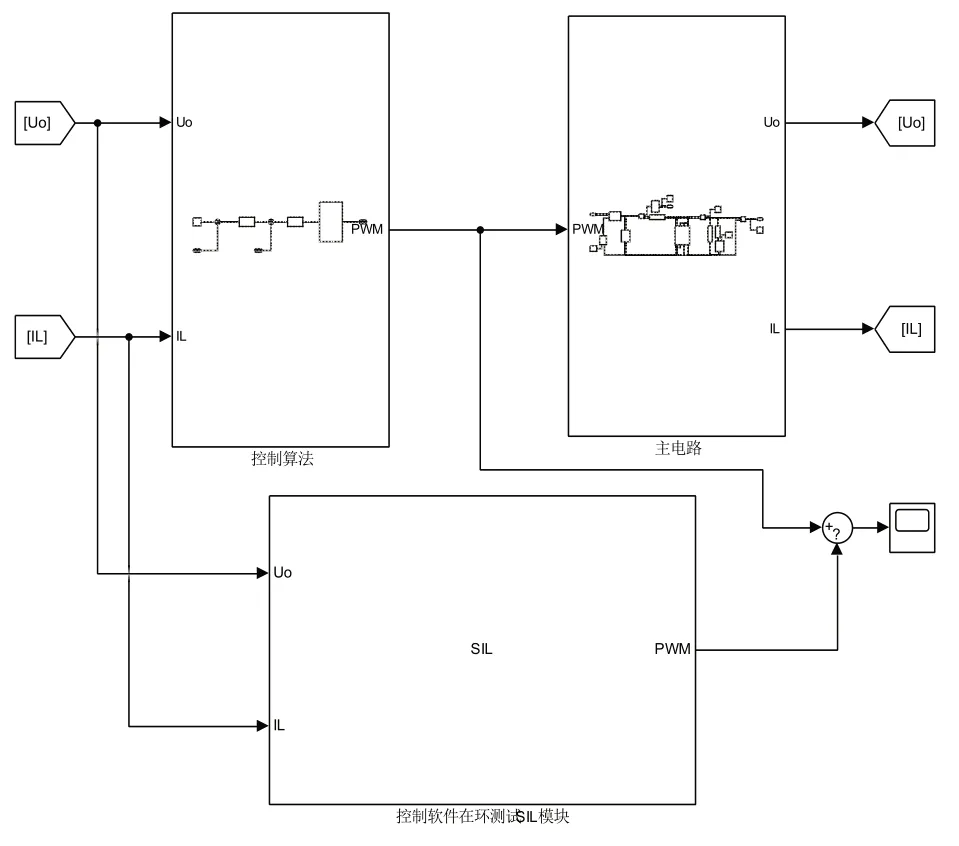
图2 软件在环测试整体系统图
采样电路的输出电压及电感电流作为环路控制的输入,同时给定电压值,稳定输出值。软件在环测试的目的是为了验证离散化后的控制算法模块能否生成代码并成功在电脑上运行。通过基础设置生成SIL 模块,用控制算法模块模块输出减去SIL 模块输出,测试结果为零,证明两部分模块同输入同输出,软件在环测试通过。
3.2 环路控制硬件在环测试(PIL)
硬件在环测试(PIL)的使用的芯片为DSP 28335选择F2833x 系列。其次是通讯模块设置,选择SCIA通讯,通过RS232通讯线连接处理器与计算机。验证部分,生成PIL模块。
如图3,连接控制算法模块与PIL 模块,通过RS232通讯线与计算机交互信息,也就是采样的输出电压和电感电流,在输出端做减法。观察到最终示波器输出为零,产生波动是因为目标芯片周围元器件的影响,波动范围在-0.000 008~0.000 008 s 属正常范围,即硬件在环测试通过。
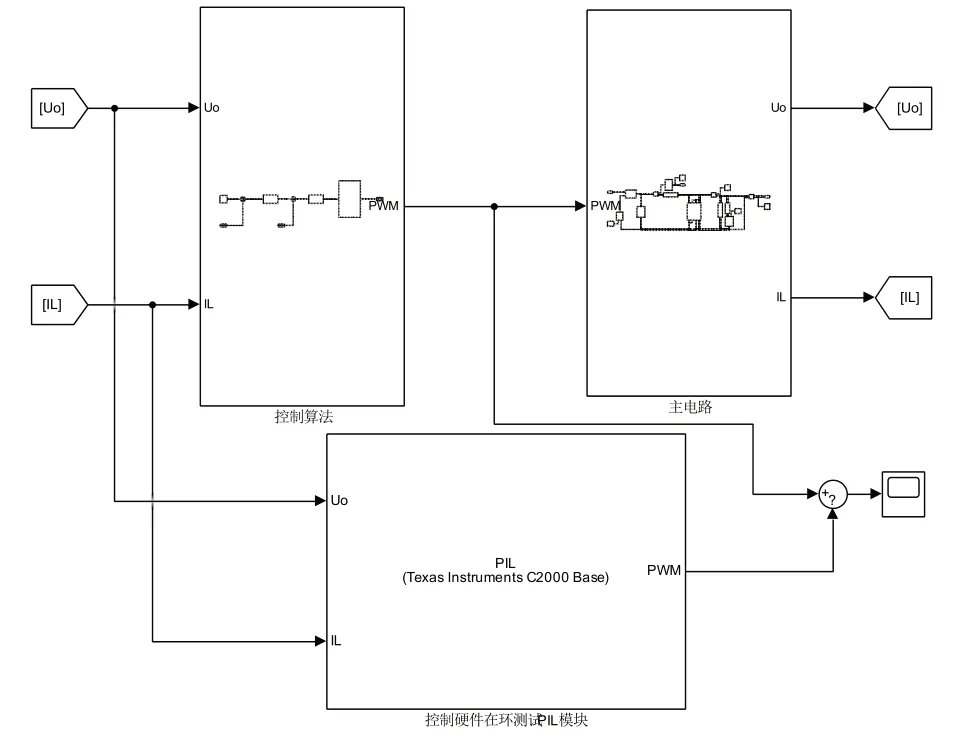
图3 硬件在环测试整体系统图
3.3 配置代码生成模型
通过软硬件在环测试后,验证了的代码的可靠性和可运行性。由于最终面向的是DSP28335,需要对底层进行基础设置。代码配置模型如图4,通过配置ADC 模块和EPWM 模块生成完整代码,其逻辑为ADC 开始采样,结束采样,触发采样结束中断,进入中断服务函数。PWM 函数运行,计数器=周期值(CTR=PRD),触发ADC-A 模块的开始转换事件,ADC 又开始采样,如此循环,最终稳定输出值。

图4 配置代码生成模型图
ADC 模块设置选择A 模块,转换模式设为顺序采样信号。Start of conversion(转换开始),设置为ePWMxA,由用户定义的PWM 事件触发。Sample time:指定待转换信号的采样间隔时间,设置为-1,从上游模块继承采样时间。勾选Post interrupt at the end of conversion—在采样结束时触发中断(回到上一步中的PIE中断)。
EPWM 模块设置选择使用epwm5,以时钟周期确定计时器周期值。点开PWM 模块(Event Trigger),勾选使能PWM 模块 在计数器=周期值(CTR=PRD)对ADC-A 模块开始转换事件(通过设置First event,第一事件/第二事件/第三事件,可以排列ADC采样事件触发顺序)。
3.4 实验结果分析
对配置好的代码模型使用Simulink工具生成代码,烧录进处理器中去,连接硬件电路板。通过示波器观察负载输出电压。设置为6 V,实际实验中受到周围元器件影响实际输出结果为6.04 V,如图5,电压纹波稳定在40 mV以内,证明了配置后自动生成的完整代码经CCS编译后在处理器中成功运行,且能够对输出进行控制,验证了基于模型设计开发半导体激光器电源控制系统的方案代替传统人工编程开发的可行性。

图5 CCS编译代码实验输出结果图
4 结语
在搭建的Simulink 与CCS 联合开发环境中设计了半导体激光器电源控制系统,并对其设计开发过程进行了详细的阐述。借助于Matlab/Simulink 快速、高地的搭建模型,过程中出现错误只需对模型进行修改,不需要对代码进行更改,极大地缩短了开发周期,通过基于模型设计的方法完成了对半导体激光器的电源控制系统的开发,验证了模型设计方法开发的可行性,同时相较于传统编程式开发电源控制系统的优越性。
猜你喜欢
数理化解题研究(2020年13期)2020-05-07
数学物理学报(2019年5期)2019-11-29
测控技术(2018年7期)2018-12-09
制造技术与机床(2017年6期)2018-01-19
光学精密工程(2016年4期)2016-11-07
电源技术(2015年9期)2015-06-05
电测与仪表(2014年11期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
上海金属(2013年4期)2013-12-20
上海电力大学学报(2011年5期)2011-07-02
