张开可控式捕捉网弹设计及仿真分析
2024-01-04 04:31刘加凯冯建伟邹攀攀
兵器装备工程学报 2023年12期
刘 升,刘加凯,冯建伟,邹攀攀
(武警工程大学 装备管理与保障学院, 西安 710086)
0 引言
面对日益复杂的社会环境,反恐防暴成为各国政府面临的严峻课题。捕捉网系统作为反恐防暴装备器材之一,因具有良好的阻滞、捕获及非致命性等特点,而被广泛应用于抓捕、伏击犯罪分子等场景。捕捉网弹作为捕捉网系统的一种,因克服传统捕捉网系统结构复杂、连发效率低、有效作用距离近等缺点,正逐渐成为未来捕捉网系统的发展方向。
当前,国内外学者及机构均对捕捉网弹进行了研究。申晨等[1]针对现有捕捉网系统存在的结构复杂、操作难度大等问题,设计了一种一体化的26.5 mm绳网弹,可以借助多功能防暴警棍发射,具有体积小、质量轻、操作方便等特点;胡明等[2]针对传统网弹发射准备时间长、二次击发效率低等问题,设计了一种电点火具点火、发射药引燃的新型网弹,并对其进行了动力学研究;国外美国福斯特·米勒公司研制了Grab系列网弹,可使用普通37~40 mm口径武器发射,有效作用距离达30 m,而时间仅需0.1 s[3]。总体来看,现有捕捉网弹虽具备操作简单、发射灵活、有效作用距离远等优点,但是面对抓捕目标逃跑、躲闪等情况,同时也存在抛撒时机不可控、处置不灵活等缺点。
捕捉网的有效展开是网弹成功抓捕目标的关键,但目前针对此方面的研究还鲜有报道,相关研究主要集中在空间非合作目标清除、反无人机绳网捕获等领域。如刘海涛等[4]针对地面环境及太空环境下的不同受力特性,建立了空间绳网动力学模型,并仿真分析了空间绳网展开过程中的动力学特性;高庆玉等[5]借鉴降落伞“先拉出、后展开”的思想,提出了一种空间绳网二级拉出展开模型,可有效克服绳网打结、缠绕等问题;Shan等[6]基于弹簧质量模型和ANCF模型建立了空间绳网的2种柔性动力学模型,仿真分析了柔性模型自由度对绳网展开运动的影响,并对比了2种模型的计算效率;魏远旺等[7]针对无人机“黑飞”问题,研究了柔性绳网拦截无人机的展开及捕捉性能,并基于Abaqus软件对拦截过程进行了动力学仿真分析;Xiang等[8]提出了一种基于磁阻电磁发射器的反无人机飞网发射技术,针对飞网的非线性大变形问题,建立了梁单元动力学模型,并对飞网的展开过程进行了仿真分析。
本文中针对现有捕捉网弹存在的缺点,设计了一种基于近感探测技术的张开可控式捕捉网弹;基于捕捉网绳力学特点,建立了考虑空气动力及重力影响下的捕捉网动力学模型,对其展开过程进行了仿真分析,并重点分析了地面风速对捕捉网展开效果的影响,以期为未来张开可控式捕捉网弹的研制提供理论支撑。
1 张开可控式捕捉网弹设计
1.1 捕捉网弹总体设计
张开可控式捕捉网弹主要由药筒组件、战斗部组件和近感探测引信等3个部分组成,如图1所示,其中药筒组件采用标准制式结构,战斗部组件包括分离火药、抛撒装置、密封圈、牵引块、捕捉网、捕捉网套及弹体,近感探测引信内含电源模块、安全保险模块及近感探测模块。战斗部组件前端与近感探测引信连接一起构成张开可控式捕捉网弹的弹丸组件,并内藏于药筒中。
1.药筒; 2.发射火药; 3.分离火药; 4.抛撒装置; 5.密封圈; 6.牵引块; 7.捕捉网; 8.捕捉网套; 9.弹体; 10.近感探测引信
该捕捉网弹工作流程为:当捕捉目标出现后,捕捉网弹在通用枪械或发射器击发下点燃发射火药,火药燃烧产生的高温高压气体将弹丸组件射出药筒;弹丸组件飞行惯性将近感探测引信中的安全保险模块解锁,电源模块启动并激活近感探测模块,其不间断高频次探测弹丸组件与目标对象之间的距离;当探测的距离小于设定阈值时,近感探测模块瞬间向抛撒装置发出点火信号,引燃分离火药,进而炸开弹体并射出牵引块,捕捉网在牵引块的带动下迅速张开,实现对目标对象的抓捕。
1.2 捕捉网结构设计
捕捉网结构包括网型和构型2个方面[9]。出于绳网受力均匀及便于折叠需要,一般捕捉网网型都设计成正多边形,且每个顶点都对应一个牵引点,通过牵引绳与牵引块相连。相关研究表明,捕捉网牵引点过多,会增加系统复杂度,易发生缠绕;牵引点过少,易出现发射偏斜,影响捕捉网展开面积,因此一般都选择正六边形网型[10]。构型是另一个影响捕捉网性能的重要因素,常用的构型有三边形、四边形及六边形,在不产生面内局部压缩和褶皱的情况下,四边形构型可以承受更大的剪切变形[9],可以更好地满足折叠收纳要求。综合以上因素,将捕捉网设计成四边形构型的正六边形网型。
根据相关标准[11],99%成年人身高均在1 814 mm以下,为能够罩住绝大数捕捉目标,捕捉网外接圆直径设计为2 240 mm;此外成年男性平均最大头宽为154 mm,成年女性平均最大头宽为149 mm,为覆盖捕捉目标头部,捕捉网四边形构型的边长设计为140 mm,牵引绳长度设计为70 mm,最终设计的捕捉网结构如图2所示。捕捉网的材质选择阻燃耐高温的Kevlar49纤维材料,纤维绳直径设计为0.5 mm。
图2 捕捉网结构
1.3 近感探测引信设计
近感探测引信用于控制捕捉网抛撒时机,为实现捕捉网弹定距近炸,近感探测模块基于激光几何截断定距探测原理实现,图3为近感探测引信信号处理电路。捕捉网弹发射后,加速度计检测发射后坐力,当超过设定阈值后,向微处理器发送信号进而启动近感探测模块工作,捕捉网弹处于目标搜索状态,当探测距离小于设定阈值时发送点火信号,实现捕捉网的抛撒。
图3 引信信号处理电路
为确保捕捉网弹平时勤务处理安全、战时发射过程可靠,近感探测引信采用了冗余安全保险设计,如图4所示,只有当发射火药熔断短路保险且战斗部运动惯性使加速度保险闭合,电路中三极管才能导通,近感探测模块才能工作。
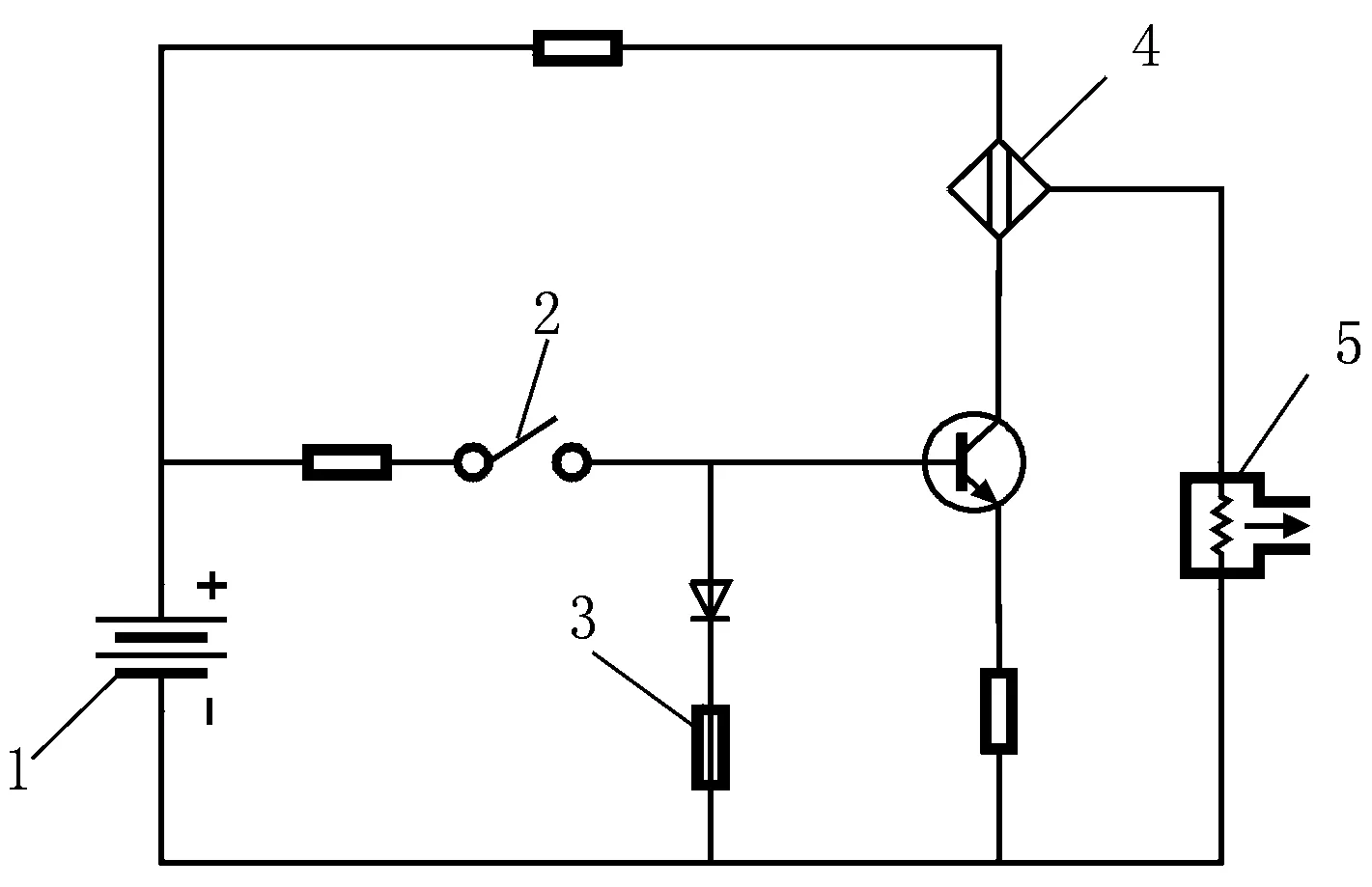
1.电源; 2.加速度保险; 3.短路保险; 4.近感探测模块; 5.点火装置
2 捕捉网动力学建模及求解
2.1 捕捉网动力学建模
捕捉网属于典型的多柔体、非线性动力学系统,目前主要有集中质量法、绝对节点坐标法等2种离散建模方法,2种方法计算结果基本一致,但集中质量法计算效率更高[12],本文采用集中质量法进行建模。集中质量法的基本原理是:将捕捉网离散为若干个绳单元,将绳单元质量均匀分布于其两端的绳节点上;然后再将绳单元等效为只能承拉而不能承压的弹簧阻尼单元;最终将整个捕捉网系统简化为由若干个离散绳单元组成的多体动力学模型。具体建模中,首先计算捕捉网各绳单元所受的内力与外力,然后再联立各绳节点动力学方程,通过求解动力学方程最后获得捕捉网系统各绳节点的位移。
2.1.1绳单元内力计算
对于捕捉网绳单元m,两端的绳节点分别记为i和j,其在捕捉网全局坐标系中的矢量位置分别为ri和rj,则绳单元m内所受的内力Tm为[13]:

(1)


(2)

(3)
式(2)中,lm为绳单元初始长度。
2.1.2绳单元外力计算
不同于空间非合作目标清除,捕捉网在近地面展开,将受到空气动力及重力等外力影响,致使捕捉网不能完全展开[14],因此在捕捉网建模中必须考虑空气动力和重力的影响。


(4)

(5)


(6)
捕捉网绳单元m所受的重力为:
Gm=ρAmlmg
(7)
式(7)中:ρ为绳网密度;Am为绳单元横截面积;g为重力加速度。
2.1.3捕捉网动力学模型建立
对于捕捉网绳节点,根据牛顿第二定律:

(8)
式(8)中:mi为绳单元在节点处的等效质量;Ω为所有与绳节点i相连的绳单元集合。
对于整个捕捉网系统,其动力学方程可以描述为:
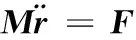
(9)
式(9)中:M为各绳节点等效质量构成的质量矩阵;r为各绳节点位移矩阵;F为各绳节点所受内力和外力和构成的矩阵。
2.2 捕捉网动力学模型求解
根据式(9)可知,捕捉网动力学模型是一组二阶微分方程,为获取捕捉网各绳节点在任意时刻的位移,需要对该方程进行数值积分求解。本文综合考虑计算精度及计算效率,采用自适应四阶龙格库塔方法进行数值求解。
对于式(9),可以将其表示为:
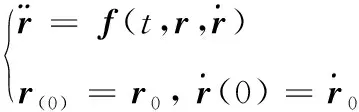
(10)


(11)
对时间进行离散处理,时间步长增量设为h,则(k+1)时刻的位移可以由k时刻的位移、速度表示为:
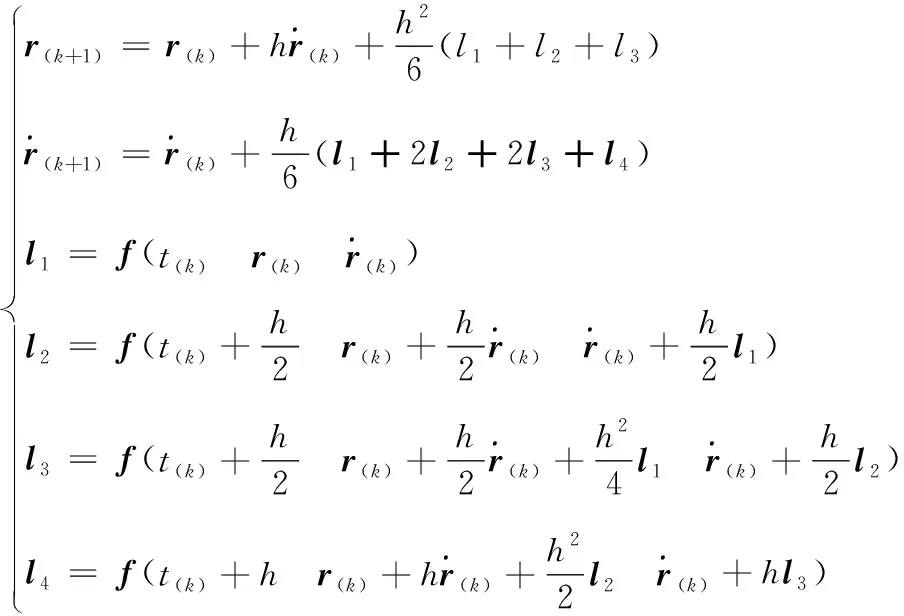
(12)
使用式(12)求解捕捉网动力学模型时,需要根据经验设置时间步长,此势必会造成程序计算精度与计算效率无法同时达到最优,而自适应步长方法却可以很好地解决此问题。自适应步长方法可以根据当前步长及当前半个步长下的计算误差自动调整步长大小,在保证计算精度的同时提高计算效率,其求解流程如图5所示。

图5 捕捉网动力学模型求解流程
3 捕捉网展开仿真分析
为验证本文所建立的捕捉网动力学模型的正确性,对捕捉网展开过程进行了数值仿真分析,仿真中忽略近感探测模块、空气摄动等因素对绳网的影响。如图2所示,以捕捉网中心O为坐标原点、自由展开面为XOY平面、水平发射方向为Z轴建立捕捉网全局坐标系;以捕捉网各绳段连接点长度划分绳单元,建立捕捉网动力学模型。仿真分析中用到的捕捉网主要参数如表1所示。
表1 捕捉网主要仿真参数
3.1 无风条件下捕捉网展开过程
假设捕捉网弹发射区域为无风区,对捕捉网展开过程进行仿真分析。图6为不同时刻捕捉网展开过程的仿真结果,由图6可知,捕捉网发射后首先以束状形式线性拉出,之后再带动周围绳段节点不断展开,捕捉网网口面积不断增大,达到最大后又不断收缩至完全合拢。受空气动力及重力影响,捕捉网始终跟随牵引块运动,捕捉网不能完全展开至最大面积,且6个牵引块所构成的展开面法向不断向重力方向发生偏转。
图6 不同时刻捕捉网展开仿真结果
捕捉网从发射到成功抓捕是一个动态过程,可以用展开面积、飞行距离、有效作用距离等3个参数进行描述[16]。展开面积定义为捕捉网6个牵引点在垂直于发射方向上投影所围成的面积,其表示捕捉网所能覆盖的范围;飞行距离为6个牵引块质心在发射方向上的投影,其表示捕捉网能够捕捉的距离;有效作用距离为捕捉网展开面积大于某一给定值(取60%自由展开面积)的飞行距离,表示捕捉网能够有效覆盖抓捕对象的运动距离。
图7、图8分别为仿真获得的捕捉网展开面积及飞行距离变化曲线。
图7 展开面积随飞行距离变化曲线
由图7可知,捕捉网展开面积随飞行距离的增加先增大后减小,因此其展开过程可分为展开和收缩2个阶段;捕捉网从展开到收缩整个过程持续时间为0.644 s,飞行距离为5.817 m,但是有效作用距离仅为2.11 m(图7中红线);在2.963 m飞行距离(0.138 5 s时刻)处,捕捉网展开面积达到最大值3.093 m2,占自由展开面积的84.07%;捕捉网飞行距离随飞行时间非线性变化,此主要是由捕捉网绳阻尼效应引起。
图8 飞行距离随飞行时间变化曲线
3.2 地面风速对捕捉网展开的影响
张开可控式捕捉网弹遂行的任务场景是多种多样的,多数时候会受地面风速影响。了解地面风速对捕捉网展开效果的影响,对捕捉网的合理设计及正确使用至关重要。相关研究表明,我国多年来平均地面风速为2.14 m/s[17];本文以此地面风速为设置条件,对捕捉网弹在无风、横风、逆风及顺风条件的展开情况进行研究。图9为不同方向地面风速下捕捉网展开面积随飞行距离的变化曲线,由图9可知,在无风与横风情况下捕捉网展开过程基本一致,对捕捉网最大展开面积几乎无影响;而逆风会加快捕捉网展开过程,减小捕捉网有效作用距离;顺风则会延缓捕捉网展开过程,增加捕捉网有效作用距离。
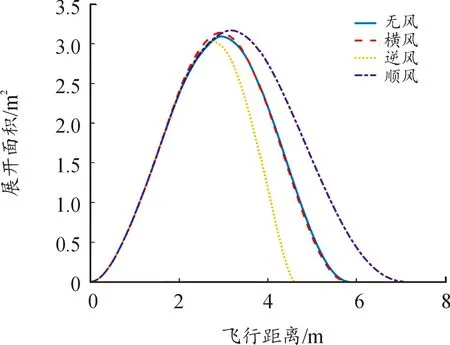
图9 不同方向地面风速对展开面积的影响
图10为不同方向地面风速下捕捉网飞行距离随时间的变化曲线,由图10同样可得出,顺风会增加捕捉网有效工作距离而逆风会减小有效工作距离。表2为不同方向地面风速下捕捉网有效作用距离,由表2可知,在年平均地面风速作用下,而相对于无风条件,顺风使捕捉网有效工作距离增加23.0%,而逆风使捕捉网有效作用距离减小20.9%。因此在张开可控式捕捉网弹使用中,为增加有效捕捉距离,应尽量顺着风向发射捕捉网。
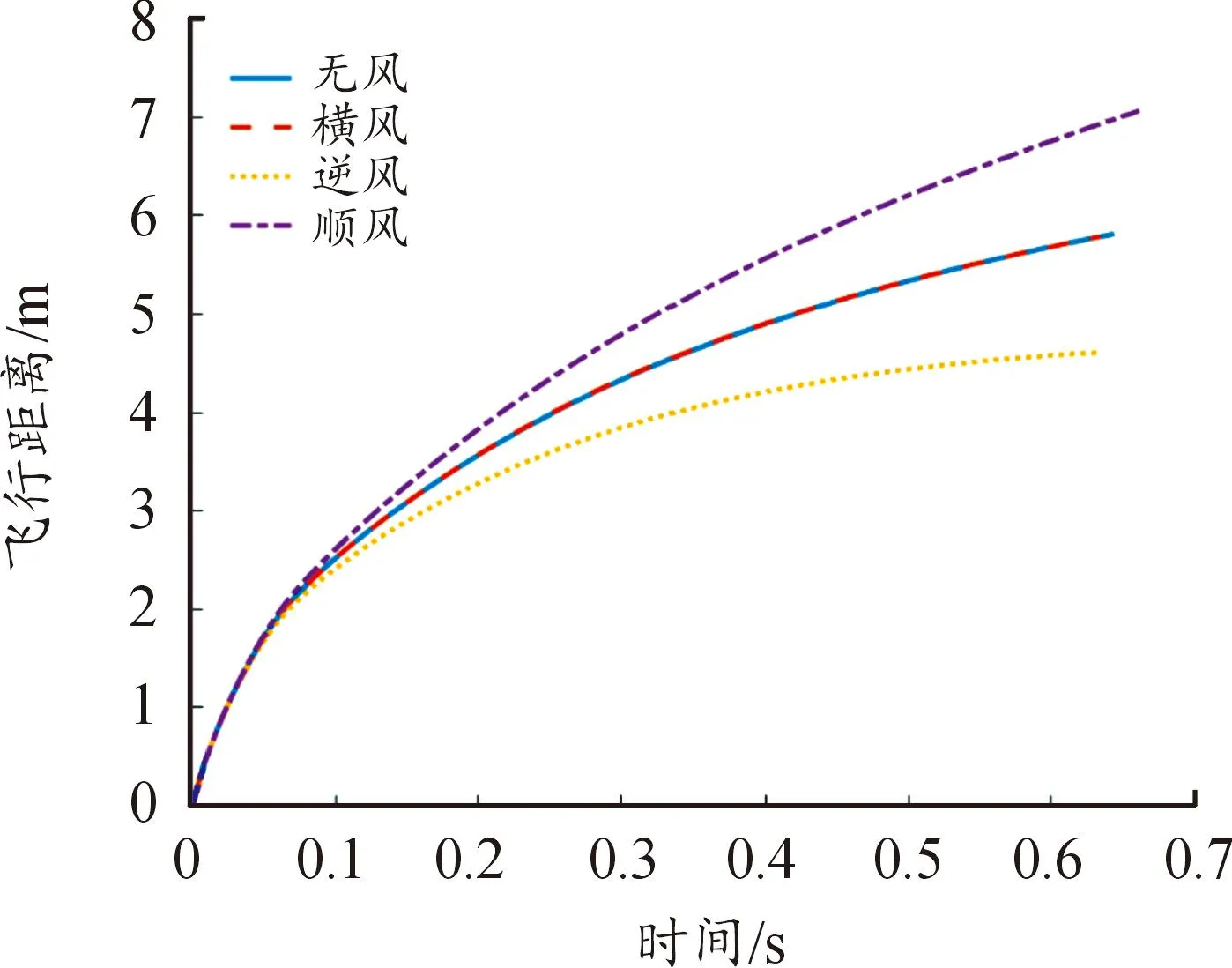
图10 不同方向地面风速对飞行距离的影响
4 结论
本文中针对现有捕捉网弹存在的抛撒时机不可控、处置不灵活等问题,设计了一种基于近感探测技术的张开可控式捕捉网弹。建立了考虑空气动力及重力影响的捕捉网动力学模型,并对有无地面风速下的捕捉网展开过程进行了仿真,得到的主要结论如下:
1) 所设计张开可控式捕捉网弹可实时探测、追踪目标对象,能有效克服抓捕对象逃跑、躲闪带来的抛撒时机不可控、处置不灵活等问题。
2) 捕捉网展开过程分为展开和收缩2个阶段,在此过程中捕捉网展开面积先增大后减小;在无风条件下,在2.963 m飞行距离(0.138 5 s时刻)处,捕捉网展开面积达到最大值3.093 m2,占自由展开面积的84.07%,有效作用距离达2.11 m。
3) 在年平均地面风速作用下,横风基本对捕捉网展开过程无影响,而相对于无风条件,顺风会使捕捉网有效工作距离增加23.0%,逆风使捕捉网有效作用距离减小20.9%。
猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29
宇航学报(2021年10期)2021-12-13
兵工学报(2021年5期)2021-06-24
兵器装备工程学报(2021年5期)2021-06-02
宇航学报(2021年4期)2021-05-24
电机与控制应用(2021年12期)2021-02-28
海洋通报(2020年5期)2021-01-14
西南交通大学学报(2016年4期)2016-06-15
浙江大学学报(工学版)(2015年2期)2015-05-30
电网与清洁能源(2015年3期)2015-02-28