
激光雷达测绘技术在工程测绘中的应用
2024-01-31 08:55张金福
工程建设与设计 2024年1期
张金福
(中建材矿业投资江苏有限公司,南京 210000)
1 引言
当前,激光雷达测绘技术飞速发展,国内外相关学者对激光雷达测量技术进行了深入研究。20 世纪80 年代,国外已将该技术与实际测量设备有效结合,实现了对地表、大气及海洋环境相关参数的测量。我国对激光雷达测绘技术的研究起步较晚,在现有测量技术基础方面较薄弱,尽管已经有部分工程应用了该测绘技术,但在测绘精准度方面与国外仍存在一定差距。
2 激光雷达技术概述
激光雷达测绘技术主要依据激光雷达系统发挥作用,该系统主要由激光测距扫描系统、惯性导航系统、动态GPS 接收系统、数码相机、同步控制装置以及遥感平台构成。作业过程中,系统测绘存在距离偏差与角度偏差,应用激光雷达测绘技术需对可能存在的偏差情况进行检校[2]。
获取基于工程现场的测绘数据后,可直接发挥激光雷达系统的作用对相关测绘数据进行处理。测绘工作得到的原始数据成果通常包括每次脉冲测距值、瞬时扫描角、GPS 观测值、地面站GPS 观测值、惯导IMU 姿态值及同步航空影响等。由激光雷达系统对以上数据进行处理,应首先对GPS 观测值及地面站GPS 观测值以同步差分的方式进行处理,计算每个激光回波脚点的三维坐标,在得到原始激光点云成果后,需充分考虑技术应用误差,对误差进行检校和平差处理。
通过滤波分类处理方式去除原始航空影像的噪点,将影像中的地面点与非地面点分离[3]。在完成分类处理后,可得到应用激光雷达获得的直接测绘数据成果。在此基础上,通过点云进行栅格化内插,对航空影像进行定向处理,与人工提取地物相结合,获得理想的数字线划地图(Digital Line Graphic,DLG)成果(见图2)。

图2 激光雷达数据处理流程
3 激光雷达测绘技术应用
3.1 项目概况
为实现对激光雷达测绘技术实际应用情况的分析,在充分考虑地形地势环境对工程现场影响的情况下,选择西南地区大渡河项目作为测绘技术应用研究的主要对象。该地区的工程项目的测绘结果常由于高山地形的影响而准确性不够。
大渡河项目为西部水利枢纽工程,项目所在区域呈山高坡陡、河谷狭窄、植被茂密等典型水电测绘项目特征。在西部地区,激光雷达设备分型的一般相对航高为2 500 m,甚至可达3 500 m。例如,当测区河床海拔为1 650 m 时,测区侧向2 km 的高山最高点距离约4 300 m。按照民航飞行相关规定,如果保证500 m 的安全飞行高度,实际飞行高度需达4 800 m以上,相对航高达3 150 m。这对激光雷达测绘技术应用提出了更高的要求。在坡度较大情况下,激光测绘数据的精度会受西部地区地形及气象条件的影响。复杂气候变化及常年较低气压均会对最终测绘数据产生影响[1]。
3.2 工程设计与建设可视化
将激光雷达测绘技术应用于大渡河项目中,可满足工程设计与建设可视化要求。
1)将激光雷达测绘技术与电子信息系统和软件相结合,构建三维可视化平台,并将工程现场施工情况及进度展现在三维场景中,可为合理安排施工顺序提供科学依据。
2)应用激光雷达测绘技术还能实现对地下工程的管理。大渡河项目为典型的水电站地下系统,可利用激光雷达测绘技术对泄洪洞、引水系统、地下厂房及导流洞等建设信息进行浏览和汇总,呈现更真实准确的工程地下部分的三维效果图,以及营地、料场、渣场等部分的细节信息。
具体而言,应用激光雷达测绘技术能够依据激光点云数据提升数据的密度和精度,由点云实现对地面植物以及建筑物、地形环境的统一分类,再以构建三角网的方式得到数字高程模型,再由数字摄影测量系统获得的检测数据,应用激光雷达技术对检测数据进行处理,从而获得更精确的数据信息以及三维坐标,能够提升影像的清晰度和精确度,以及测绘技术的应用效果。
在工程设计阶段,也可以应用激光雷达测绘技术构建数字信息模型,借助激光雷达设备,在计算机系统中构建电子沙盘,在实现工程现场相关数据信息的收集、储存、调用与维护,得到所需的高程、坡度、线路全长测量数据信息,可以以此为依据构建三维虚拟地面模型,进而借助模型提取建筑物的顶面信息。然后基于系统软件实现对建筑物模型和地面模型的分层组合建模,以匹配融合的方式对工程建筑物的质量进行检测和评价。在此基础上,也可以将数字相机以及其他类型的传感设备与激光雷达应用平台联系起来,对工程现场电力传输进行有效测量和检查。
3.3 精密工程测量
3.3.1 精密测量结果
大渡河项目的相对航高为2 900 m,应用激光雷达测绘技术,采用50 kHz 的发射频率获取点间距为2 m 的点云数据和地面分辨率为22 cm 的数码影像。在实际测绘中,该项目应用无人机(内含激光雷达设备)共飞行3 个架次,测绘范围包括4个分区61 条航线,数据覆盖面积达800 km2。项目应用激光雷达测绘技术时选取24 个规则建筑物角点,在明确激光数据平面误差为0.527 m 的前提下,结合得到的平面点位误差分布情况,得到项目平面高程精度的统计结果(见表1)。

表1 大渡河项目平面高程精度统计结果m
将表1 中得到的数据与GB/T 14912—2017《1:500 1:1 000 1:2 000 外业数字测图规程》中的标准进行对比,考虑在1:2 000平面位置中的误差限差为0.60 m,困难地区的误差限差为0.90 m,高程精度限差为0.66 m,可以验证该项目的激光平面精度符合工程测绘的设计要求。
3.3.2 激光测绘误差检测原理
激光测绘误差系统由多个模块组成,每个模块在实际观测中均存在一定的系统误差。通常情况下,系统误差分为定位误差、测角误差、测距误差以及系统集成误差。
测距误差具体包括系统误差和随机误差2 种类型。在设定系统误差部分为Δp的情况下,可以得到如下公式:
式中,θi为瞬时扫描角;ex、ey、ez代表e位置在x、y、z轴上的坐标值。
在激光雷达扫描的直角坐标系中,测距误差对飞机的前进方向分量不产生影响,主要在高程方向产生误差(见表2)。
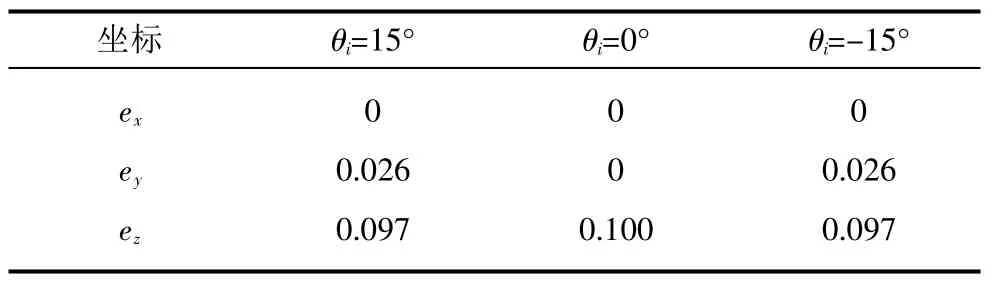
表2 10 cm 测距误差引起的e 位置误差
在测角误差中,对工程测绘效果影响较明显的为瞬时扫描角误差。激光扫描电机的非匀速旋转和扫描镜的振动均会导致扫描角误差。为了对横轴方向造成的差异与扫描角之间的关系进行分析,以计算旋转矩阵的方式,得到更精确的误差结果。基于此,引入由于扫描瞬时误差引起的旋转矩阵ΔRL,可基于以下公式计算旋转矩阵:
式中,Δk、Δφ为设备扫描线在横纵坐标相反方向的随机角度偏差值,属于偶然误差;Δϑ为扫描方向纵轴的随机角度偏差,属于零点误差。
在定位误差中,考虑动态差分GPS 的定位误差也会对激光脚点精度产生影响,故应从卫星轨道运转、接收机钟差、卫星钟差、多路径效应等角度对误差大小进行具体分析。考虑到项目地形地势环境特点,地面基站点位的观测条件及航飞时机均对GPS 解算产生影响,因而在实际测绘中,应在航带平差时及时修正各航带的平面位置和高程。
在系统集成误差部分,应重点考虑时间同步误差、内插误差及坐标转换误差对测绘结果精准度的影响。以时间同步误差为例,由于激光雷达测绘系统中的GPS 接收机、IMU、激光扫描仪等设备均以独立方式进行工作,以确定激光脚点坐标为目的,确保激光脉冲发射时的位置、姿态及测距测角值为同一时刻下的观测值。在设备飞行不稳的情况下易产生时间偏差,影响激光点的精度。
3.3.3 误差检测结果分析
考虑激光测绘技术应用过程中会产生精度误差,该工程在获得相应测绘数据后,以检验高程精度的结果为主要目的,对分类后得到的激光点云数据形成的地面模型与实测的高程点进行误差统计,在有植被、农作物及河谷两侧的山坡上,基于同一坐标系统对实测值和激光数据进行检查,获得的统计误差结果为0.332 m。
考虑该检测误差结果包含坐标转换误差及平面误差,对硬质裸露地面的高程点进行检查,发现这些检查点未被其他系统误差影响,得到的中误差数据为0.095 m。将该结果与GB/T 14912—2017《1:500 1:1 000 1:2 000 外业数字测图规程》中的标准进行对比,发现实际测得的标准明显低于相应比例尺地形图基本等高距的1/3。在比例尺为1:2 000 的情况下,标准高程精度为0.67 m,可以证实应用该激光雷达测绘技术符合工程实际的设计要求。
4 结语
综上所述,在工程测绘中应用激光雷达测绘技术能有效提升工程测绘的精准度和检测效率。在充分考虑工程项目现场实际环境条件基础上,应用激光雷达测绘技术应明确激光雷达测绘技术的应用原理,积极探索将激光雷达与先进科学技术有效融合的途径和方法,在满足工程测绘基本要求的同时加强工程质量管理与控制,在确保测绘数据结构真实性和准确性的前提下,推动工程测绘的数字化建设,进一步提升工程建设效果。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
当代陕西(2020年23期)2021-01-07
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
中国公共安全(2017年7期)2017-10-13
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
电子制作(2017年9期)2017-04-17
