
飞行器轨迹的半参数估计方法
2024-03-04 12:57李振兴
兵器装备工程学报 2024年2期
李振兴,李 冬,刘 学
(中国人民解放军91550部队, 辽宁 大连 116023)
0 引言
飞行器试验鉴定一般采用光学、雷达等多台套精密测量设备对飞行器跟踪测量,然后对所有设备的测量数据作融合处理,获得飞行器轨迹的高精度估计,用于分离飞行器的制导工具误差,进而评定飞行器的命中精度[1-3]。随着飞行器制导元器件精密度的不断提高,为保证制导工具误差的有效分离,对轨迹估计的精度要求越来越高。设备测量误差导致轨迹的估计值偏离真实值,是影响轨迹估计精度的关键因素,研究能够最大限度抑制测量误差的轨迹估计方法对于提高飞行器轨迹的估计精度有着重要意义。
飞行器轨迹估计的精度主要受2种测量误差影响,第1种误差是由设备内部热噪声、环境扰动等引起的随机误差,在零值附近随机波动,一般根据统计规律融合多个测量数据对其作补偿抑制。第2种误差是系统误差,是由设备标校不准确、时间不同步、大气折射修正残差等引起的测量偏差。飞行器轨迹估计通常根据系统误差的变化规律进行参数化建模,例如建立常值模型、线性模型、周期模型等,采用参数估计方法同时估计轨迹和分离系统误差,从而降低系统误差对轨迹估计精度的影响[4-6]。然而,在实际测量中,受多种复杂误差源的综合影响,系统误差往往不具有规律性,无法用参数模型对其进行建模描述,而如果不考虑这种不可参数建模的系统误差,势必会降低轨迹估计的精度。
针对无法利用参数估计方法分离不可参数建模系统误差的问题,统计学界提出了半参数估计方法[7-9],用参数模型表示待估计的真实信号,用非参数表示不可参数建模的系统误差,建立既含有参数又含有非参数的半参数回归模型,采用半参数估计方法同时获得参数分量和非参数分量的估计,可实现真实信号与系统误差的有效分离,从而提高真实信号的估计精度。许多学者将半参数估计方法应用于人造卫星的轨道确定[10-12]。文献[10]建立基于补偿最小二乘的半参数联合定轨模型,同时估计卫星轨道参数和模型误差。文献[11]针对天基测量确定初轨问题,提出了基于半参数模型的广义正则化最小二乘估计方法,既有效抑制了不可参数建模系统误差,又提高了初轨确定的稳定性。文献[12]理论上证明了半参数回归补偿最小二乘估计法优于经典最小二乘法。文献[13]将半参数估计方法应用于惯导离心机试验中的加速度计误差模型辨识,可同时辨识加速度计误差模型参数和系统误差。目前将半参数估计方法应用于飞行器轨迹估计问题的研究较少,文献[14]利用多项式调制函数表示系统误差,由轨迹估计后的残差来估计多项式调制函数的系数,该方法本质上仍然是参数估计方法,多项式调制函数很难对实际应用中的复杂系统误差进行精确表示,因此该方法对轨迹估计精度的提升效果有限。
文中针对飞行器轨迹估计的不可参数建模测量系统误差的抑制问题,提出一种半参数估计方法。该方法建立既包含参数待估量又包含非参数待估量的半参数回归模型,参数待估量为飞行器轨迹的样条表示系数,非参数待估量为测量系统误差,采用参数估计和非参数估计交替迭代的方式求解半参数回归模型,参数估计利用非线性最小二乘法估计轨迹的样条表示系数,非参数估计利用小波分析方法从残差数据中分离系统误差。最后从理论上分析了半参数估计方法的精度,并通过仿真实验对文中方法的估计精度进行了验证。
1 飞行器轨迹的参数估计
1.1 轨迹建模


(1)

根据式(1),飞行器轨迹的样条表示模型为
x(t)=B(t)α
(2)
1.2 测量模型


(3)
(4)
式(4)中:β=(β1,β2,…,βp)T为p维系统误差参数向量。
发射坐标系向地心坐标系的旋转矩阵记为C,地心坐标系向测站坐标系的旋转矩阵记为G,测站和发射原点在地心坐标系下的矢量分别记为rs0=(xs0,ys0,zs0)T和rf0=(xf0,yf0,zf0)T,则飞行器的位置和速度从发射坐标系到测站坐标系的转换关系表示为[1]
(5)
令y(t)为t时刻的所有测量参数组成的向量;根据式(3)和式(5),y(t)可表示为轨迹x(t)的函数:
y(t)=f(x(t))+s(t)+ε(t)
(6)
式(6)中:s(t)为测量的系统误差向量,ε(t)为测量的随机误差向量,其协方差矩阵记为Σ(t)。将轨迹的参数模型(2)、系统误差的参数模型(4)代入测量模型(6),可得到如下以样条系数α和系统误差参数β为未知参数的测量模型:
y(t)=z(t,α,β)+ε(t)
其中,z(t,α,β)=f(B(t)α)+s(t,β)。
1.3 参数估计
飞行器轨迹测量的采样时刻记为t1,t2,…,tn,轨迹估计是根据所有采样时刻测量数据y(t1),y(t2),…,y(tn)的融合值给出轨迹X=(x(t1),x(t2),…,x(tn))T的最优估计,从而获得飞行器高精度的位置和速度。考虑到不同测站测量精度不一致,需利用测量随机误差的协方差矩阵对测量模型作归一化处理[6],以实现不同测站多源数据的最佳融合:
Y=(Σ-1/2(t1)y(t1),…,Σ-1/2(tn)y(tn))T
Z(α,β)=(Σ-1/2(t1)z(t1,α,β),…,Σ-1/2(tn)z(tn,α,β))T
E=(Σ-1/2(t1)ε(t1),…,Σ-1/2(tn)ε(tn))T
其中,E服从均值为零协方差矩阵为单位矩阵的高斯分布,这样便可建立以样条系数和系统误差参数为待估参数的非线性回归模型:
Y=Z(α,β)+E
采用非线性最小二乘法估计样条系数和系统误差参数:
可采用高斯牛顿迭代法[1]求解上述非线性最小二乘问题。飞行器轨迹的估计为
其中,B=(B(t1),B(t2),…,B(tn))T。
2 飞行器轨迹的半参数估计
2.1 半参数估计
受测量设备状态、环境因素的影响,测量系统误差往往呈现复杂特性。例如图1所示的某型光学设备俯仰角测量的系统误差,对于这种复杂的系统误差无法建立常值模型、线性模型、周期模型等参数模型,因此不能采用参数估计方法同时估计轨迹的样条表示系数和分离系统误差。以下将不可参数建模的系统误差用非参数表示,建立既包含轨迹表示参数又包括非参数的半参数回归模型,采用半参数估计方法求解半参数回归模型,同时获得轨迹和系统误差的估计结果。
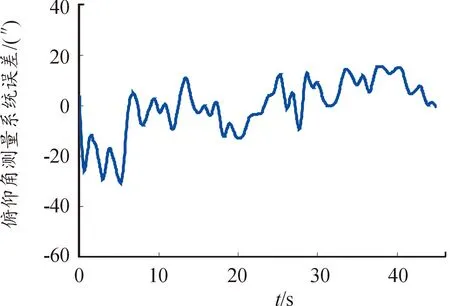
图1 光学设备俯仰角测量的系统误差
考虑不可参数建模系统误差的影响,建立如下测量模型:
y(t)=f(B(t)α)+s(t)+ε(t)
利用采样时刻t1,t2,…,tn的测量数据建立归一化的半参数回归模型:
Y=F(Bα)+S+E
(7)
其中
F(Bα)=(Σ-1/2(t1)f(B(t1)α),…,Σ-1/2(tn)f(B(tn)α))T
S=(Σ-1/2(t1)s(t1),…,Σ-1/2(tn)s(tn))T
模型(7)的待估量除了包括参数α,还包括非参数S,半参数估计方法需同时获得参数α和非参数S的估计。
测量随机误差和系统误差会在轨迹估计后的残差数据中有所体现。其中,系统误差通常表现为变化平缓的低频信号,而随机误差为变化剧烈的高频信号,可根据2种误差的不同频率特性采用小波分析方法[16]将两者进行分离,从而提取残差中的低频信号,将其作为系统误差的近似值,再将扣除系统误差后的测量数据用于轨迹估计,可进一步改善轨迹估计的精度。
半参数估计采用轨迹估计和系统误差分离交替迭代的方式实现,轨迹估计采用非线性最小二乘法,轨迹估计完成后,采用小波分析方法对残差数据作系统误差分离,利用分离结果对测量数据作修正,由修正后的测量数据再进行轨迹估计,进一步修正轨迹估计结果,这一过程反复迭代,直到残差数据中不含系统误差为止。半参数估计方法的原理如图2所示。
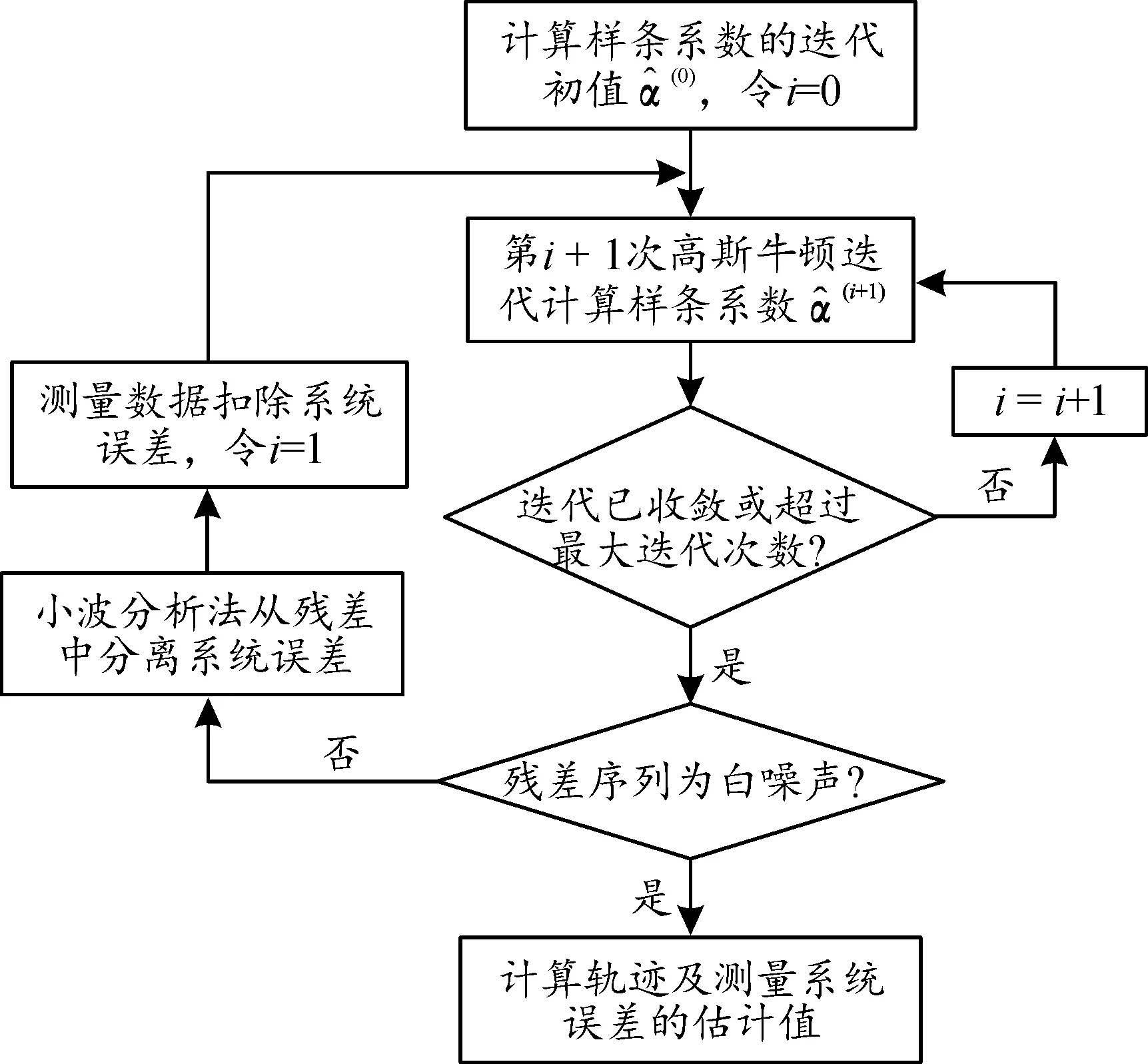
图2 半参数估计方法的原理图
具体步骤如下:



步骤4检验残差ΔY是否为白噪声,如果是,则转到步骤6,否则,令j=j+1,转到步骤5。
步骤5利用Daubechies7小波从残差ΔY中分离出系统误差ΔS(j)和测量噪声,令Y=Y-ΔS(j),i=0,ω=1,转到步骤2,重新利用高斯牛顿迭代法估计α。

2.2 估计精度分析

于是
即
BTAT(Y-F(Bαp))=0
(8)

(9)
由式(8)和式(9)可得:
于是,参数估计方法的轨迹估计精度为
B(BTATAB)-1BT+QQT
(10)

同理可得:
B(BTATAB)-1BT
(11)

即半参数估计方法得到的轨迹精度优于忽略系统误差的参数估计方法的精度。
3 仿真实验与结果分析
利用仿真实验检验半参数估计方法的性能。飞行器的真实轨迹由6自由动力学仿真模型产生,时长为94 s,采样率为20 Hz。5台雷达(测量数据为距离和距离变化率)和2台光学设备(测量数据为方位角和俯仰角)对飞行器跟踪测量。利用测量设备的站址和飞行器的轨迹真值生成测量真值,在测量真值的基础上通过叠加测量误差生成仿真测量数据,其中,距离、方位角和俯仰角的测量误差含有不可参数建模系统误差的实测值,距离变化率测量误差为均方根为0.05 m/s的随机误差。
分别采用参数估计方法和半参数估计方法对飞行器轨迹进行估计,其中,参数估计方法忽略距离、方位角和俯仰角的不可参数建模系统误差的影响,而半参数估计方法对系统误差进行分离。
通过比较轨迹估计值与真实值的差异得到轨迹的估计误差,由估计误差的大小分析估计方法的精度。t时刻的位置和速度估计误差分别定义为

图3和图4分别是位置和速度估计误差随时间变化的曲线图。可见,半参数估计方法相对参数估计方法关于位置和速度的估计精度都有较大幅度提高,参数估计方法对位置和速度估计的平均误差分别为1.29 m和0.095 m/s,而半参数估计方法对位置和速度估计的平均误差分别为0.62 m和0.055 m/s,与参数估计方法相比,半参数估计方法关于位置和速度的估计误差分别减少了51.9%和42.1%。
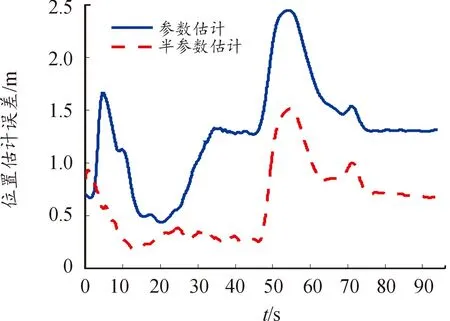
图3 位置估计误差

图4 速度估计误差
图5是其中1台雷达的距离测量误差及半参数估计方法获得的系统误差估计结果。图6是半参数估计方法分离出的随机误差。可见,系统误差估计值的变化平缓,频率较低,与测量误差的变化趋势相吻合,分离出的随机误差频率较高,接近于白噪声。图7是其中1台光学设备的俯仰角测量误差及系统误差估计结果。图8是对应的随机误差分离结果,可见,半参数估计方法对光学设备系统误差的分离效果也较好。图7和图8中的误差曲线在45~75 s出现空白,这是因为该时段飞行器进入云层,光学设备丢失目标,没有获得测量数据。
图5 雷达距离测量误差及系统误差估计结果
图6 雷达距离测量随机误差的分离结果
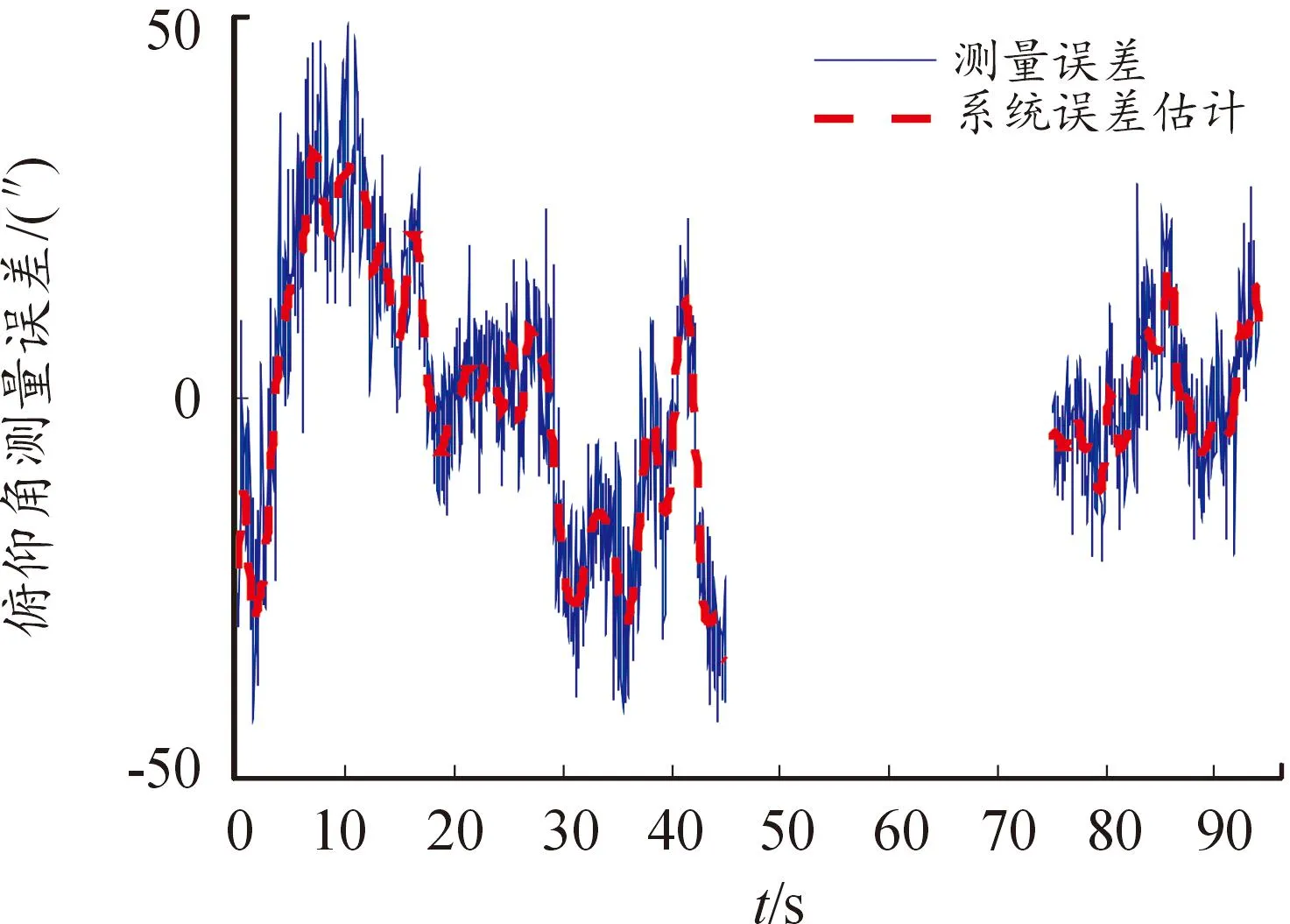
图7 光学设备俯仰角测量误差及系统误差估计结果
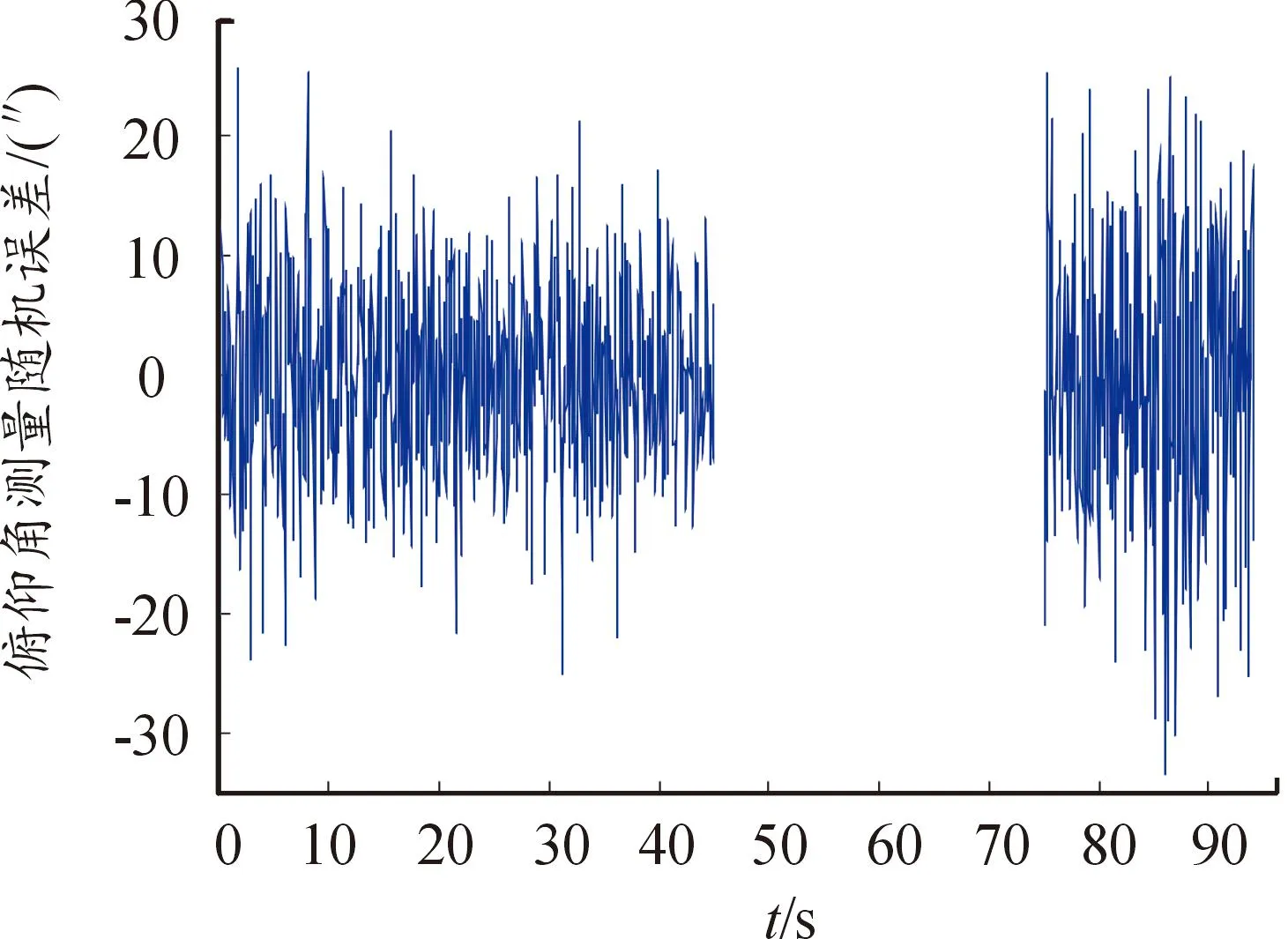
图8 光学设备俯仰角测量随机误差的分离结果
4 结论
1) 提出了一种基于半参数回归的飞行器轨迹估计新方法,可同时估计轨迹参数和分离不可参数建模的测量系统误差,有效抑制了测量系统误差对轨迹估计的影响,提高了轨迹估计精度。
2) 得到了半参数估计方法估计精度的理论公式,从理论上证明了半参数估计方法的精度优于传统的参数估计方法。
3) 通过仿真实验检验了半参数估计方法的轨迹估计精度,结果表明,半参数估计方法对飞行器位置和速度的估计精度相对参数估计方法都有大幅度的提高,系统误差分离结果准确可靠,有效解决了不可参数建模系统误差的处理难题,在飞行器试验鉴定领域有重要应用价值。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
凤凰动漫(军事大王)(2022年1期)2022-04-19
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2017年4期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
统计与决策(2017年2期)2017-03-20
数学物理学报(2016年5期)2016-08-24
系统工程与电子技术(2016年7期)2016-08-21
系统工程与电子技术(2016年2期)2016-04-16
小朋友·快乐手工(2015年5期)2015-06-06
