
一种通用的自动舵PID参数快速检测方法的研究
2007-06-01 12:30周永余陈永冰
船海工程 2007年2期
陈 阳 周永余 陈永冰 周 岗
海军工程大学电气与信息工程学院 武汉 430033
一种通用的自动舵PID参数快速检测方法的研究
陈 阳 周永余 陈永冰 周 岗
海军工程大学电气与信息工程学院 武汉 430033
以自动舵的基本控制原理为基础,在不拆解控制板的前提下快速获得可信的自动舵PID的参数,构建自动舵PID参数的快速检测的硬件环境,并通过比例参数、积分参数、微分参数的检测,证明该方法具有良好的通用性。
舰船自动舵 PID参数 快速检测 模拟放大板
自动舵的PID参数对舰船的航向控制有直接的影响,在自动舵的中修和应急修理中,自动舵的PID参数的检测和调整是非常重要和关键的工作。自动舵的PID参数中的微分和积分动态性能指标无法在自动舵静态时进行测试,一般需在舰船运动时才能反映出这些参数的影响[1]。目前自动舵的PID参数的检测可采用两种方式:一是在实船进行航行时试验,二是采用自动舵的陆上仿真系统与自动舵相连,由自动舵控制模拟的船只航行,按照模拟船只的航行状态来测定PID参数[2]。
以上两种方法中对于动态参数的测试均较为复杂,检测的速度较慢,且只能概略地给出微分参数,测试的精度不高。研究一种通用自动舵的PID参数检测方法,能大大地提高PID参数的检测速度和测试精度,通过对相关自动舵控制板件的测试,可实现对自动舵PID参数的快速检测。
1 检测原理
一般自动舵的放大控制板是自动舵控制处理的核心,它包含交流信号的解调、PID控制运算、综合放大运算及其它辅助电路,其主要的功能是根据航差角和反馈舵角的差值信号的电压值,进行比例、微分、积分控制,按PID控制规律输出相应的打舵信号。通过对控制板的测试即可测定自动舵的PID参数。
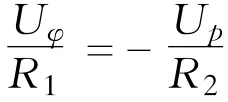
反馈舵角β与航差角φ关系式为[3-4]

式中:Kp——比例参数;
Ki——积分参数;
Kd——微分参数。
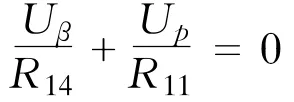
自动舵参数检测即是在自动舵不同工作状态下给定不同航差角和反馈舵角,使自动舵输出为零,达到平衡时,利用式(1)由已知的β和φ计算出各个参数值。经过相敏解调后,φ和β可以映射到它们解调后的电压值上,因此根据式(1)可以相应写出电压Uφ和Uβ间关系式

由式(2),当控制板分别工作于比例状态、比例加积分状态、微分状态下达到平衡时可以得到
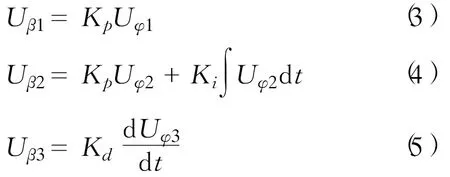
在控制板工作的不同模式下,加载动态变化的航差角和反馈舵角信号,使控制板按照“平衡—失衡—平衡”的方式变化,同时检测舵机控制信号的输出,当系统达到新的平衡时采集Uφi、Uβi电压值即可按照式(3)~(5)计算出参数。
2 实现方法
根据不同的工作状态施加合适的输入和反馈信号,使放大控制板达到动态平衡即能够测得相应的Kp、Ki、Kd参数,具体方法如下。
2.1 比例参数检测
关断微分和积分工作电路,使自动舵工作于比例状态。在航差角信号输入部分施加一固定的指令信号,此时由于舵角反馈为零,放大控制板失衡,舵机控制信号应有输出,在舵角反馈端输入舵角β按照一定斜率变化使控制板逐渐平衡,当放大控制板线性输出信号为零时分别记录下Uβ1、Uφ1。由于此时微分、积分系数为零,由式(3)即可得到比例系数Kp为

2.2 积分参数检测
将自动舵置于比例加积分工作状态。在舵角反馈端输入固定舵角信号β,此时放大控制板舵机控制信号应当有输出。航差输入端输入固定信号φ(Kpφ<β),计时器开始计时,由于积分器的作用,放大控制板将逐渐平衡,在放大控制板输出为零时停止计时,这样得到积分器的充电时间,同时记录平衡时的电压Uβ2、Uφ2。由式(4)可以得到积分系数Ki为

在积分测试中需要注意航差输入Kpφ必须小于舵角反馈β,否则放大控制板将发散而无法平衡。
2.3 微分参数检测
将自动舵置于纯微分工作状态,在航差角输入端输入,按斜坡变化的航差角φ,此时有Uφ=Kφt,放大控制板不平衡而输出打舵信号。反馈舵角同时输入按斜坡变化信号β跟踪PID处理后的信号,以平衡放大控制板,此时有Uβ=Kβt。当放大控制板平衡输出为零时,记录下此时的电压Uφ3、Uβ3。由式(5)可以得到微分系数Kd为

由于放大控制板输入电压有范围限制,设计K1、K2前必须考虑在微分输入饱和前使放大控制板达到新的平衡,否则无法检测出微分参数。
当输入达到饱和的时间t1为
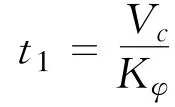
式中:Vc——微分器输入饱和电压。检测完成的时间t2为
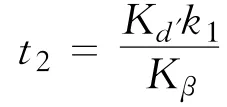
式中:Kd′——预测微分参数。
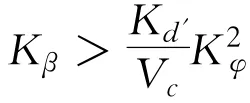
当t2<t1时,即必须满足条件才能够测出微分参数。
3 试验验证
为验证测试方法的准确性,按照图1搭建检测硬件环境,能够产生输入信号并采集航差信号和反馈舵角信号电压。其中信号发生器可以输出固定或按规律变化电压,AD采样用于采集经相敏解调后的电压和综合放大器线性输出电压,MCU则承担改变放大控制板工作模式、控制信号的加载、检测电压值并将采集的电压值发送至PC进行处理等工作。
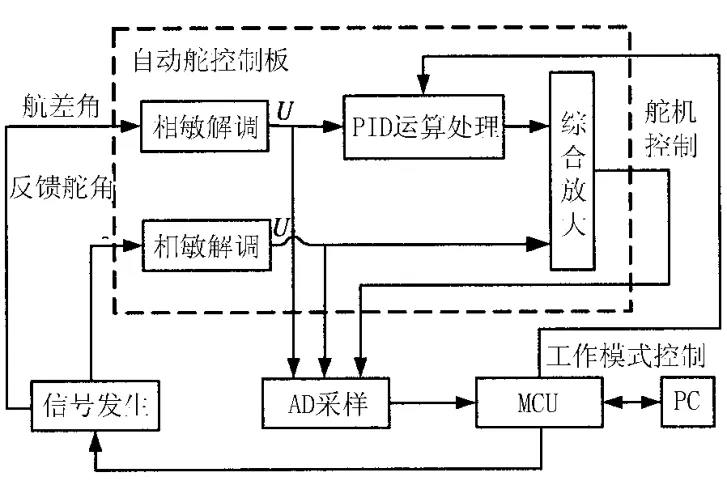
图1 PID参数检测示意图
研制的模拟放大控制板作为被测对象以检验测试方法的准确性,该PID运算部分电路见图2。
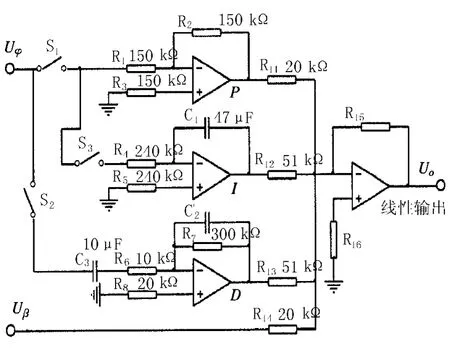
图2 模拟放大控制板PID运算电路
由放大器的特性可以计算出PID参数的理论值。以比例运算部分为例
工作在比例模式下电路平衡,即U0=0时,有此时可以计算出
同理可计算出积分和微分参数,按照电容实测容值C1=54.1μF,C3=12.1μF进行计算得

通过AD采样实时采得电压值由MCU传至PC后,在Matlab下可以将数值绘制成比例、积分和微分测试曲线,并计算出待测参数,见图3。
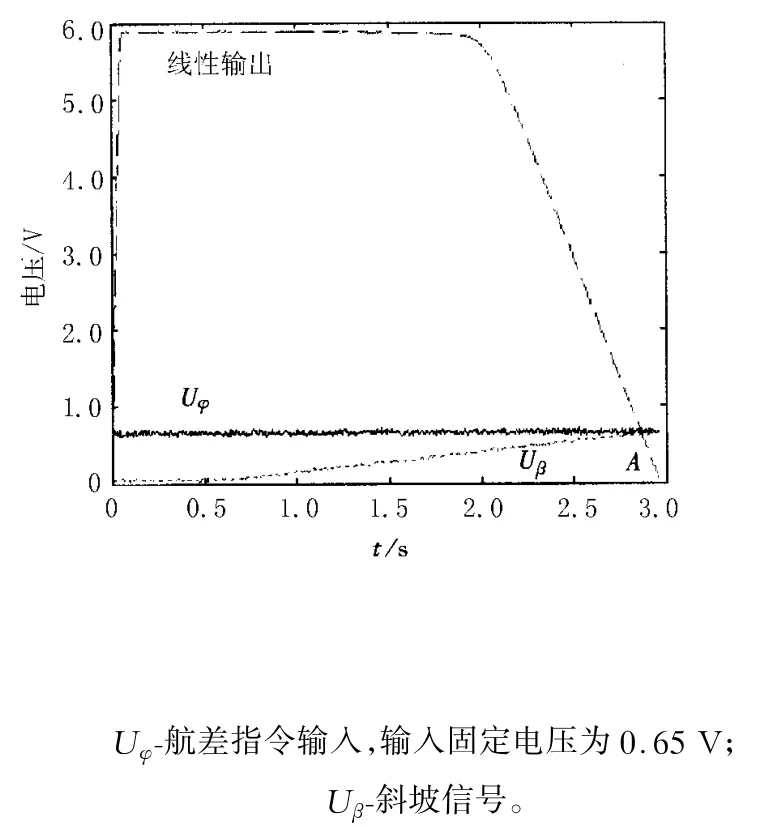
图3 比例参数测试曲线
图3在A时刻被测板达到平衡,此时Uβ=0.644 V,由式(6)有
即该比例档比例系数为0.990。
按照积分测试方法测得积分测试曲线,见图4。由比例系数Kp=0.990,航差输入和舵角反馈输入衡值,测得电压

由线性输出可见,控制板在时刻A达到新的平衡,对应横坐标22.700 s,按照式(7)可得
按照微分参数测试方法测得微分参数,测试曲线见图5。微分信号输入斜坡信号Uφ,斜率K1=0.747 V/s,由于微分作用控制板线性输出饱和输出,舵角反馈输人固定斜率微分信号以平衡控制板,在时刻A线性输出过零,控制板达到平衡,此时Uβ=1.110 V,由式(8)得
由表1可见,各项参数检测值与理论值十分吻合,表明检测结果准确,且由曲线可以看出全部检测耗时不超过1 min,相对以往的方法,本方法使检测速度大大地提高。
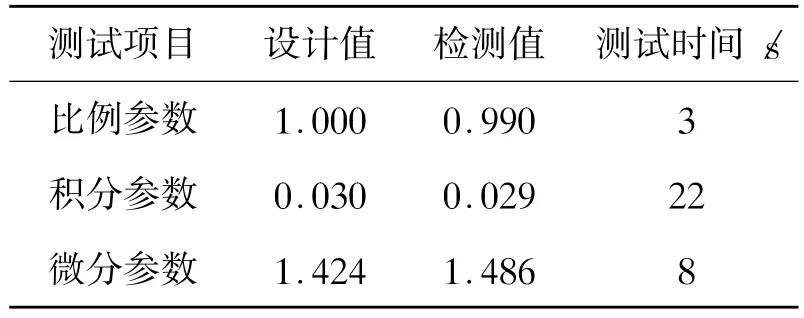
表1 PID参数检测值与设计值的比较
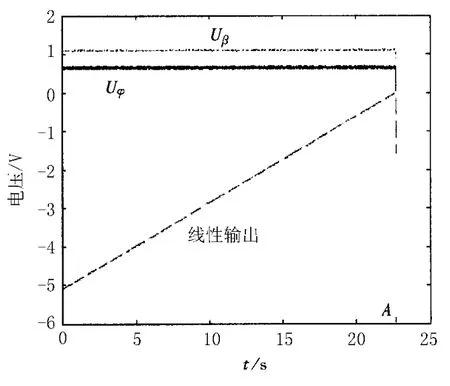
图4 积分参数测试曲线
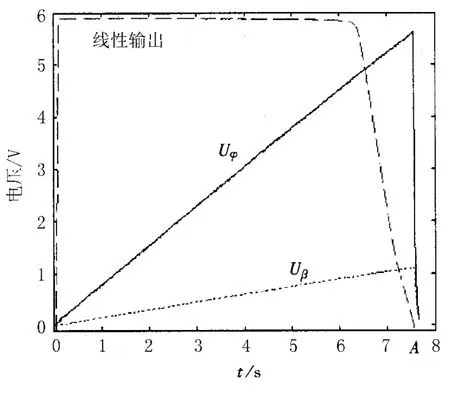
图5 微分参数测试曲线
4 结论
经过试验验证,自动舵PID参数的测试方法,能够快速准确地检测出自动舵的PID参数,大大的简化了自动舵的调试工作,能够提高自动舵维修的效率。现在该检测方法已经应用到某型自动舵的智能检测仪上。该智能检测仪经用户使用证明,能明显地提高自动舵的PID参数的调试效率,并对放大控制板上的元件失效而导致的参数变化能准确地检测,对保障自动舵装备的完好率具有很重要的意义。
[1]周永余,高敬东.舰船自动操舵仪[M].武汉:海军工程大学出版社,2001:1-20.
[2]叶 桦,陈永冰,周永余.航向自动舵海上工作环境的建立[J].海军工程大学学报,2003,15(3):54-58.
[3]杨盐生,于晓力,贾欣乐.船舶航向自适应鲁棒PID自动舵设计[J].武汉交通科技大学学报,1999,23(6):594-598.
[4]林月美.自动舵比例微分系数自适应算法研究[J].中国修船,2001,16(3):23-24.
A universal and rapid testing method for the autopilot PID parameters
CHEN Yang ZHOU Yong-yu CHEN Yong-bing ZHOU Gang
School of Electric and Information Engineering Naval University of Engineering Wuhan 430033
A universal method to test PID parameters of the autopilot is introduced based on the basic control theory of the autopilot.The hardware environment is constituted for rapid test of these parameters.This method is proved to be feasible and efficient by lots of experiments,and it is valuable to be applied.
ship autopilot PID parameters rapid test analog amplify board
U666.16
A
1671-7953(2007)02-0034-04
2006-09-08
修回日期2006-11-22
陈 阳(1980—),男,硕士生。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
黑龙江大学自然科学学报(2022年1期)2022-03-29
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
舰船电子工程(2020年4期)2020-06-19
电子制作(2019年23期)2019-02-23
教育教学论坛(2017年34期)2017-08-30
中国科技纵横(2017年13期)2017-08-09
北京航空航天大学学报(2017年10期)2017-04-20
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
