捷联惯性/星光组合导航车载试验研究
2008-12-20 02:05纪志农
空间控制技术与应用 2008年6期
王 岩,余 凯,纪志农
(北京自动化控制设备研究所,北京100074)
捷联惯性/星光组合导航车载试验研究
王 岩,余 凯,纪志农
(北京自动化控制设备研究所,北京100074)
星光导航是一种自主导航系统。阐述了捷联惯性/星光组合导航系统的构成,星敏感器的工作原理,捷联惯性/星光组合导航的工作原理,以及三种组合导航工作模式。利用现有的设备,进行捷联惯性/星光组合导航系统的车载试验,验证了捷联惯性/星光组合导航技术的可行性和有效性。
星敏感器;捷联惯导;组合导航;车载试验
1 引 言
星光导航是根据天体在天球上的精确坐标和地球的运动规律来测量天体相对于载体的精确坐标,通过相应数学模型解算出载体位置、航向或姿态的导航方法。星光导航系统具有隐蔽性好、自主性强和定位、定向精度高等优点。将星敏感器刚性连接于捷联惯导系统中构成的捷联惯性/星光组合导航系统是一种自主式导航系统,由于天体目标的不可干扰性和星光导航系统可同时获得高精度位置和航向信息,能全面校正惯导系统的特性,使得捷联惯性/星光组合导航系统在军事上有着极其重要的战略地位。国内外利用星光导航信息校正惯导系统位置和航向的方法,在各种高空、远程飞行器以及舰船、核潜艇、远程导弹和战略轰炸机等一些具有特殊战略战术要求的武器系统或装备中得到了广泛应用[1]。
2 捷联惯性/星光组合导航系统的组成
组合导航系统从硬件结构上可分成捷联惯导系统和星敏感器两部分,其中捷联惯导系统由光纤陀螺组合、加速度计及信号转换电路、导航计算机、直流电源、总体结构及减振器、应用软件等组成;星敏感器由光学探测系统、遮光罩和CCD敏*感器等组成。系统组成框图如图1所示。
3 捷联惯性/星光组合导航系统工作原理
星敏感器系统由遮光罩、光学镜头、CCD及支持电路、数据处理器、电源和外部接口等组成。遮光罩用来遮挡各种杂散光。
星敏感器是在硬件和软件的基础上进行工作的,其基本工作原理为[2]:恒星所发出的星光通过光学系统成像在CCD光敏面上,通过CCD信号检测电路将星光的光能转换成模拟信号,模拟信号处理单元对其进行放大、滤波和整形等处理后,由模数转换单元对其进行模数转换和数据采集。当天空星图以数字量的形式存储于内存时,数据处理单元对数字化后的星图进行处理,星提取软件对星图进行大目标剔除、星点提取、星点坐标计算和星等计算。星识别软件对星图中的星按匹配方法构造匹配模式,与导航星库中的已有模式进行匹配、处理,形成观测星与导航星的唯一匹配星对。利用匹配星对,姿态计算软件可确定星敏感器光轴在惯性空间中的指向,最后由此姿态指向及星敏感器与载体的安装关系就可以完成载体瞬时姿态的测量。

图1 捷联惯性/星光组合导航系统组成图
陀螺仪感测载体绕三个正交轴的角运动,经信息处理电路产生频率与载体角速率成比例的数字量信号;加速度计感测载体沿三个正交轴的线运动,输出信号经过I/F转换电路转换为频率与加速度成比例的脉冲信号;以上信号被导航计算机的可逆计数器接收成为16位数字信号,在导航计算机中完成误差补偿、初始对准和导航计算,得到载体在导航坐标系上的速度、位置和姿态信息,称其为惯性导航信息。导航计算机将惯导的姿态和位置信息定时发送给星敏感器,帮助星敏感器完成星图捕获和匹配计算。另外,导航计算机还接收星敏感器的导航信息,在导航计算机内按照组合算法进行惯性导航信息与星光导航信息的组合,并完成对惯导系统的误差校正。
3.1 坐标系定义[3]
(1)地心惯性坐标系O-XIYIZI
坐标系原点O为地心,XI轴位于赤道面内且指向春分点,ZI轴垂直于赤道面且指向北极,YI轴在赤道平面内为XI轴和ZI轴的叉乘,符合右手定则。
(2)地球坐标系O-XEYEZE
坐标系原点O为地心,ZE轴与地球自转轴重合,XE轴位于赤道平面内且指向格林威治子午线,XEYEZE构成右手坐标系。
(3)地理坐标系OG-XGYGZG
坐标系原点OG取为飞行器质心,XG轴指北,YG轴指天,ZG轴指东。地理坐标系相对于地球坐标系的关系就是飞行器的地理位置,即经度λ和纬度L。
(4)载体坐标系OB-XBYBZB
该坐标系与载体固联,XB沿载体纵轴方向,YB沿载体竖轴方向,ZB沿载体侧轴方向。载体坐标系相对于地理坐标系的关系就是载体的姿态和航向。
(5)星敏感器坐标系OS-XSYSZS
坐标系原点OS位于星敏感器CCD面的中心,ZS轴沿星敏感器光轴,XS轴、YS轴在CCD面内,XS轴、YS轴和ZS轴符合右手叉乘定则。
3.2 星光导航原理
不考虑地球的章动及曲率等因素的影响。令载体坐标系相对于地理坐标系的姿态分别为θ(俯仰角)、γ(滚动角)和ψ(方位角)[3]。
惯性坐标系到载体坐标系的姿态变换矩阵为AB/I,地理坐标系到载体坐标系的姿态变换矩阵为AB/G[3],则有

式中,
A11=cosθcosψ
A12=sinθ
A13=-cosθsinψ
A21=-cosγsinθcosψ+sinγsinψ
A22=cosγcosθ
A23=cosγsinθsinψ+sinγcosψ
A31=sinγsinθcosψ+cosγsinψ
A32=-sinγcosθ
A33=-sinγsinθsinψ+cosγcosψ
地球坐标系到地理坐标系的姿态变换矩阵为AG/E[3]

惯性坐标系到地球坐标系的姿态转移矩阵为AE/I

式中当忽略地球的章动和进动等因素影响时,已知当前格林威治时间即唯一确定φ(t)。
综合考虑以上各式,则有

星敏感器坐标系与载体坐标系的姿态转移矩阵为AS/B,式(4)左边第一项AS/B可以通过标定的方法得到,右边第一项AS/I可通过星敏感器精确测量而得到,第二项AI/E在已知当前时间的条件下也可得到。为了求解上面的复杂等式,需要已知某两个参数:如果水平姿态角θ、γ已知时,可求得载体相应的经度λ、纬度L和方位角ψ;如果载体的经度λ、纬度L已知时,则可求得载体的水平姿态角θ、γ和方位角ψ。
4 捷联惯性/星光组合导航系统工作模式
(1)补偿陀螺漂移模式[4-6]
星敏感器在不需要任何外部基准信息的前提下,可直接精确地提供飞行器载体坐标系相对于惯性坐标系的姿态信息,且精度在全程保持稳定;而捷联惯导系统中的陀螺仪组件也是直接敏感载体坐标系相对于惯性空间的姿态,但其精度随时间增长而降低。该组合模式能够有效地观测并补偿捷联惯导系统中因陀螺漂移而引起的导航误差。
(2)惯导辅助水平模式
根据捷联惯导系统提供的水平姿态信息,通过星光导航系统修正捷联惯导系统的位置及航向角误差。该工作模式中,组合导航系统的精度主要取决于捷联惯导的水平姿态角精度,然而其给出的载体航向角信息相对而言是比较高的,可以达到角秒级。
(3)惯导辅助位置模式
该模式与惯导辅助水平基准模式原理类似,即由惯导系统连续输出载体的位置导航信息,星敏感器测量载体相对于惯性空间的姿态,通过反算星光导航三角方程即可确定惯导的姿态角。相应的,惯导系统的位置信息可以不用非常精确,从国内的工程应用情况来看,300m的位置误差对应于10″的姿态角误差,具有非常高的精度。
在惯导辅助水平模式的使用中,如果直接利用惯导的水平姿态信息进行星光组合定位,由于惯导的水平姿态信息随时间漂移,会带来较大的定位误差,1″的姿态角误差会带来30m的定位误差。
惯导系统的误差主要由陀螺和加速度计两方面的误差引起的,其中陀螺的误差引起惯导的姿态误差,加速度计的误差引起惯导的速度误差。姿态和速度误差相互影响,如果惯导的姿态误差比较小,惯导的速度误差也不会发散的很快,反之亦然。本文采用惯导辅助位置模式,利用惯导系统提供的位置信息进行星光组合,修正惯导的姿态,从而减小惯导的速度和姿态误差。
5 试验验证
车载试验采用的捷联惯导系统陀螺的精度为0.05(°)/h,加速度计的精度为2×10-4g,g为重力加速度。星敏感器在垂直光轴方向的精度为4″,平行光轴方向的精度为100″。
依据组合导航原理,进行了多次组合导航系统原理样机车载导航试验,使用手持式GPS卫星接收机作为基准导航信息,与惯性导航信息进行比较以确定导航定位误差。精度评定采用《惯性导航系统精度评定方法GJB 729-89》中规定的RMS均方差计算方法。利用工作模式2和工作模式3分别进行了车载试验,工作模式2利用惯导提供水平姿态,进行组合修正惯导的位置误差。工作模式3利用惯导提供位置信息,进行组合修正惯导的姿态误差。在短时间内惯导的位置误差相对惯导的姿态误差发散的比较慢,因此利用工作模式3能够得到理想的效果。下面列出了利用工作模式3所获取的六组试验数据。
图2~5是所选择的一组车载试验数据,纯惯导与组合导航的速度和位置曲线,表1是停车后6组车载试验纯惯导与组合导航的速度和位置误差的对比(导航时间为1500s),表2是6组车载试验纯惯导和组合导航的位置误差的统计量(导航时间为1500s)。
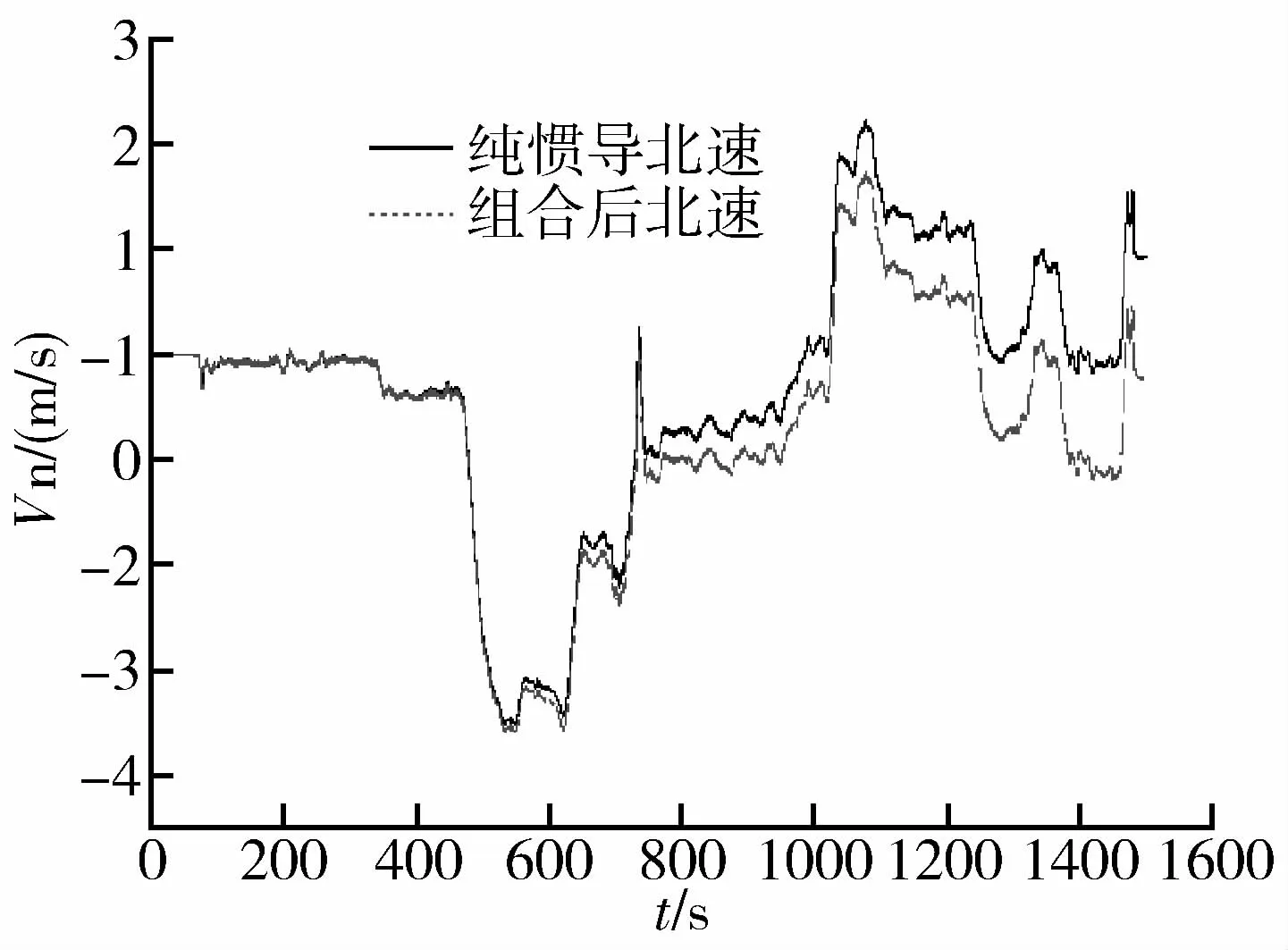
图2 组合前后北向速度

图3 组合前后东向速度

图4 组合前后经度

图5 组合前后纬度
从表中试验数据可以看出,利用星敏感器提供的高精度姿态信息修正惯导系统的姿态角误差,可有效减小系统的位置和速度误差,提高组合导航系统精度,车载导航精度在1500s内优于300m(1σ),达到了预期的试验目标。
6 结 论
星光导航是一种自主导航系统,它能够补偿惯导系统中由于陀螺漂移所引起的姿态误差,间接地减小惯导系统的速度和位置误差。星光导航不能补偿惯导系统中由于加速度计漂移所引起的系统误差。

表1 纯惯导和组合导航的误差对比表

表2 纯惯导和组合导航误差对比表
本文分析了捷联惯性/星光组合导航的系统构成、工作原理和工作模式,并进行了车载试验,验证了星光组合导航系统的可行性和有效性。
[1] 房建成,宁晓琳.天文导航原理及应用[M].北京:北京航空航天大学出版社,2006,4-9
[2] 王岩,张路,郑辛.在飞航导弹中用星敏感器修正捷联惯导陀螺漂移[J].中国惯性技术学报,2007,15(5):550-554
[3] 秦永元.惯性导航[M].北京:科学出版社,2006,231-263
[4] 陈霞.天文/惯性组合导航模式研究[J].光学与光电技术,2003,1(3):21-24
[5] 李艳华,房建成,贾志凯.INS/CNS/GPS组合导航系统仿真研究[J].中国惯性技术学报,2002,10(6):6-10
[6] 李家齐,王红卫,刘爱东等.一种天文/惯性导航系统组合模式的研究[J].自动化技术与应用,2005,24(4):13-15
Investigation On SINS/Star Integrated Navigation Vehicular Test
WANG Yan,YU Kai,JIZhinong
(Beijing Institute of Automatic Control Equipment,Beijing 100074,China)
Star navigation is an autonomous navigation system.The composition of SINS(strap-down inertial navigation system)/star integrated navigation system,principles of star sensor,and SINS/star integrated navigation system,and three working modes are discussed in the paper.The vehicular test of SINS/star integrated navigation system are done using existing equipments.Feasibility and effectiveness of the SINS/star integrated navigation system are demonstrated through the vehicular test.
star sensor;strap-down inertial navigation system;integrated navigation;vehicular test
V429
A
1674-1579(2008)06-0044-04
2008-06-12
王 岩(1979-),男,河南人,工程师,研究方向为星光组合导航技术(e-mail:xiao_feiniu@126.com)。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
计算技术与自动化(2014年1期)2014-12-12