
固体运载火箭轨迹/总体参数一体化优化设计研究①
2010-01-26 11:31杨希祥江振宇张为华
固体火箭技术 2010年6期
胡 凡,杨希祥,江振宇,张为华
(国防科技大学航天与材料工程学院,长沙 410073)
0 引言
近年来,随着对快速进入空间技术需求的日益迫切,固体运载火箭的发展已备受关注。固体运载火箭研制作为一项系统工程,总体设计一直是其中的牵引项目。总体方案确定后,才能为分系统方案论证及方案设计提供依据。总体参数优化设计又是总体设计的关键内容,确定最优的飞行器总体参数,可使飞行器在概念设计阶段即可达到整体最优性能,最大程度挖掘飞行器设计性能[1]。运载火箭飞行轨迹对总体参数设计有重要影响,因此从系统科学角度来说,运载火箭总体参数优化设计应与轨迹优化设计同时考虑,即形成轨迹/总体参数一体化优化设计问题。
余梦伦院士最早在国内提出开展这一问题的研究[2],文献[1]采用余院士的观点,开展了系列化运载火箭轨迹/总体参数一体化优化设计研究,文献[3]研究了空中发射有翼固体运载火箭动力/气动/轨道等多个学科的一体化优化设计问题。
文中研究了地基发射新型固体运载火箭轨迹/总体参数一体化优化设计问题。研究的运载火箭采用“三级固体发动机+液体末助推”串联式结构布局,运载火箭姿态控制采用“侧向喷流+栅格舵”方式,各级固体发动机均采用耗尽关机工作模式。
1 轨迹/总体参数一体化优化设计数学模型
1.1 质量计算模型
质量计算模型是运载火箭发射质量、有效载荷、结构质量、设备质量和推进剂质量的计算方程。质量计算是轨迹/总体参数一体化优化设计的基础。质量模型分为展开型模型和导出型模型。在总体方案论证阶段宜使用导出型模型。
固体运载火箭总起飞质量可表示为

式中 m0,1为运载火箭总起飞质量;ms为有效载荷质量;mz1为整流罩质量;m4为末助推级(仪器/推进舱)质量;mp,i为第i级固体发动机装药量;ms,i为第i级固体发动机结构质量;mg,i为运载火箭第i子级除发动机之外的结构质量(包括尾段结构质量、尾段内仪器设备和电缆、级间段结构质量、级间段内仪器设备和电缆质量等)。
本文中运载火箭各级直径固定。又由于运载火箭采用侧向喷流控制,没采用摆动喷管时的伺服机构,因此上述结构质量变化不大,视为固定质量。
运载火箭仪器/推进舱质量m4可表示为

式中 mp,4为液体推进剂质量;mcx为储箱质量,它随推进剂质量变化而变化;myq为除储箱外的动力系统干重及控制系统等仪器设备质量。
运载火箭第i子级起飞质量可由式(3)确定:

式中 m0,i+1为第(i+1)子级起飞质量。
第i级发动机的ms,i和mp,i之间满足:

式中 εi为第i级固体发动机质量比。
1.2 动力计算模型
运载火箭总体方案论证阶段,可采用相对较简单的发动机推力模型,将各级飞行段发动机推力简化为平均推力,第i级固体发动机平均推力¯Pi、工作时间ti、比冲Isp,i和装药量mp,i间存在如下关系式:

1.3 气动力计算模型
运载火箭方案设计阶段需考虑升力影响。阻力和升力的计算式如下:
式中 ρ为大气密度;v为相对运动速度;SM为特征面积;CD和CL分别为阻力系数和升力系数,优化计算中采用基准方案的气动数据插值得到。
1.4 飞行程序控制模型
运载火箭俯仰程序角设计如下:
(1)一级飞行段
运载火箭一级在稠密大气层中飞行,飞行程序表达式参见文献[4]。
(2)二级飞行段
运载火箭二级及二级以上飞行段大气已较稀薄,飞行程序按真空飞行段设计,采用多重参数化方法,飞行程序设计为如下形式:
式中 t3为二级发动机关机时刻;φ·2为二级动力飞行段姿态角变化速率;为二级滑行段结束时刻;θ为速度倾角,ωez为地球自转角速度分量,~为二级分离时间。
(3)三级飞行段
式中 t4为三级发动机关机时刻;φ·3为三级动力飞行段姿态角变化速率;为三级滑行段结束时刻;~为三级分离时间。
(4)末助推段

运载火箭弹道计算模型参见文献[5]。
2 轨迹/总体参数一体化优化设计问题描述
2.1 目标函数
运载火箭总体参数优化设计的目标函数,应能充分反映主要设计性能指标。在给定运载能力的前提下,以起飞质量最小为目标函数:

运载火箭质量是一项重要战略技术指标,尤其是对快速响应的小型固体运载火箭,其机动性、维护使用性等都与质量密切相关;另外,运载火箭质量可间接影响其成本。
2.2 设计变量
设计变量是指能在设计过程中确定设计方案和描述设计特性的独立变量。根据问题性质和设计经验,选择下述13个参数为设计变量:

式中 A0为发射方位角;fig为一级飞行段程序控制量;θ3为三级滑行结束时当地速度倾角。
由于上述设计变量数量级相差悬殊,优化计算中对设计变量作规范化处理。规范化公式为

2.3 约束条件
目标轨道为太阳同步轨道时,等式约束包括:
式中 h、v、i、e分别为实际入轨高度、速度、轨道倾角和偏心率;hobj、vobj、iobj、eobj分别为目标轨道高度、速度、轨道倾角和偏心率。
不等式约束包括:

2.4 优化算法
为提高求解精度和效率,设计了“自适应遗传算法+序列二次规划”的序贯混合优化算法。
遗传算法(Genetic Algorithms,GA)[6]具有很好的全局寻优特性,但基本遗传算法在实际应用中存在收敛速度缓慢、早熟、局部寻优能力较差等缺点,且对运载火箭轨迹/总体参数一体化优化这样同时存在等式约束和不等式约束的复杂优化问题,往往采用罚函数法处理约束条件,存在对约束处理不够灵活的问题,为改善遗传算法的寻优精度,文中采用了自适应遗传算法(AGA)[7]。
序列二次规划(Sequential Quadratic Programming,SQP)收敛性好、计算效率高、边界搜索能力强,且能有效处理含约束问题[8],在飞行器轨迹优化领域得到广泛应用[8-9]。但该算法需预先给定优化设计变量初值,迭代初值的优劣直接影响算法的性能,而对实际优化设计问题来说,较好初值的给定往往十分困难。
综合上述2种算法的互补特性,设计了“AGA+SQP”的序贯混合优化策略,即首先采用遗传算法获得“广义”最佳可行解,然后将此可行解作为SQP的迭代初值进行寻优计算。“广义”最佳可行解是指在利用AGA进行寻优时,可适当放宽约束条件,以在更大范围内为SQP提供较好迭代初值。优化策略流程如图1所示。
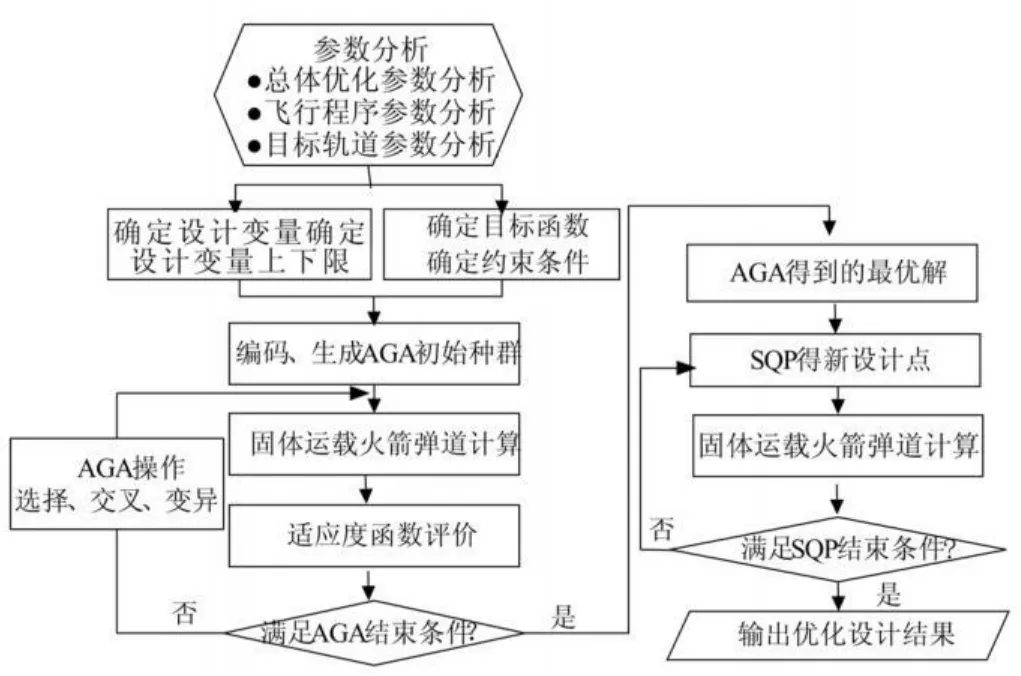
图1 基于AGA和SQP的序贯混合优化策略Fig.1 Sequential hybrid op tim ization strategy based on AGA and SQP
3 优化结果与分析
应用上述建立的固体运载火箭轨迹/总体参数一体化优化设计模型,研究“三级固体+液体末助推”的运载火箭优化设计,运载能力设计为将270 kg有效载荷送入300 km太阳同步轨道。考虑运载火箭结构质量偏差、比冲偏差、秒流量偏差等因素对运载能力的影响,优化计算时末级液体推进剂设计30 kg安全余量。固体发动机地面比冲2 450 N·s/kg,真空比冲2 860 N·s/kg,末助推级干重(不含储箱)160 kg,液体发动机推力3 kN,比冲3 060 N·s/kg,整流罩质量170 kg。
起飞推重比约束为,1.5≤N0≤2.5;过载约束nmax≤14.5g,nymax≤0.01g;攻角约束|α|max≤3°;动压约束q≤0.09 MPa;分离高度约束H≥22 km。
自适应遗传算法种群规模取为80,最大进化代数50,交叉概率0.75,变异概率0.05,连续5代最优值不变即中止计算,序列二次规划方法采用SNOPT软件实现。优化结果如表1和表2所示。
优化结果表明,优化方案运载火箭起飞质量比原方案减小13.62%,各项约束条件均得到很好满足。

表1 设计变量最优解Tab le 1 Op tima l solution in particle swarm

表2 对应最优解的性能参数Table 2 Trajectory parameters corresponding to optimal solution
目标函数和部分设计变量收敛曲线如图2~图4所示。由图2~图4可看出,自适应遗传算法优化阶段最优目标函数值一直递减,这是因为自适应遗传算法中,遗传算子的操作具有方向性,进化都是向着优良个体进行,未出现染色体退化现象,序列二次规划算法应用阶段,迭代收敛速度很快。
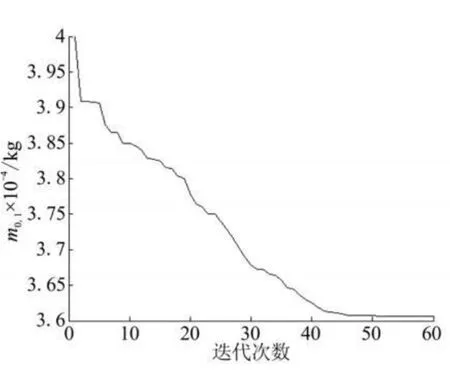
图2 目标函数收敛曲线Fig.2 Convergence curve of objective function

图3 一级发动机装药量收敛曲线Fig.3 Convergence curve of charge for the first stage solid rocketmotor
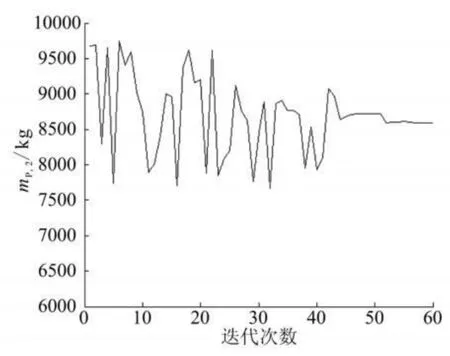
图4 二级发动机装药量收敛曲线Fig.4 Convergence curve of charge for the second stage solid rocket motor
4 结论
(1)建立了固体运载火箭轨迹/总体参数一体化优化设计问题数学模型;
(2)为有效求解轨迹/总体参数一体化优化问题,综合考虑自适应遗传算法和序列二次规划方法优缺点,设计了“自适应遗传算法+序列二次规划”的序贯混合优化算法;
(3)采用建立的优化模型和设计的优化算法,有效解决了13个设计变量、10个约束条件的固体运载火箭轨迹/总体参数一体化优化设计问题,优化方案运载火箭起飞质量比基准方案减小13.62%。
[1] 罗亚中.系列化运载火箭总体优化技术研究[D].长沙:国防科技大学,2003.
[2] 余梦伦.地球同步卫星发射轨道的设计[J].中国空间科学技术,1982,2(2):1-8.
[3] 孙丕忠,朱伯鹏,夏智勋,等.水平空中发射固体有翼运载火箭总体/动力/气动/轨道一体化设计与优化[J].固体火箭技术,2005,28(3):157-168.
[4] 杨希祥,张为华,肖飞,等.小型固体运载火箭运载能力分析[J].固体火箭技术,2009,32(4):355-359.
[5] 贾沛然,陈克俊,何力.远程火箭弹道学[M].长沙:国防科技大学出版社,1993:65-67.
[6] 杨希祥,李晓斌,肖飞,等.智能优化算法及其在飞行器优化设计领域的应用综述[J].宇航学报,2009,30(6):2051-2061.
[7] 黄友锐.智能优化算法及其应用[M].北京:国防工业出版社.2008.
[8] 胡正东.天基对地打击武器轨道规划与制导技术研究[D].长沙:国防科学技术大学,2009.
[9] Mateen-ud-Din Qazi,He Linshu,Tarek Elhabian.Rapid trajectory op tim ization using computational intelligence for guidance and conceptual design of multistage space launch vehicles[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit,San Francisco,California,2005:1-18.
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
中学生数理化·高一版(2021年2期)2021-03-19
汽车工程(2021年12期)2021-03-08
今日农业(2020年23期)2020-12-15
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
中国外汇(2019年6期)2019-07-13
电子制作(2019年24期)2019-02-23
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
中学生数理化·高一版(2017年2期)2017-04-25
