汽车 DYC滑模控制器设计及系统稳定性分析
2010-03-16 09:22丁能根余贵珍
北京航空航天大学学报 2010年11期
张 为 丁能根 王 健 余贵珍
(北京航空航天大学 交通科学与工程学院,北京 100191)
汽车 DYC滑模控制器设计及系统稳定性分析
张 为 丁能根 王 健 余贵珍
(北京航空航天大学 交通科学与工程学院,北京 100191)
直接横摆力矩控制(DYC,Direct Yaw Moment Control)可在极限工况下产生维持车辆稳定行驶所需的附加横摆力矩,从而提高汽车的主动安全性能.建立了能够满足汽车稳定性控制测试要求的非线性汽车动力学模型,设计了用于汽车 DYC的滑模变结构控制器(SMC,Sliding Mode Controller),并利用李氏函数证明了系统的稳定性,最后在 Matlab/Simulink环境下对 SMC的稳定性和控制效果进行了仿真测试.仿真结果表明了控制算法的有效性,并通过与 PID(Proportional-Integral-Derivative)算法控制效果的对比说明了 SMC具有更好的鲁棒性,拥有更好的应用潜力.
直接横摆力矩控制;滑模变结构控制器;稳定性分析
在行车安全问题日益得到重视的现代社会,作为汽车主动安全技术的代表,汽车电子稳定系统成为目前国际上的研究热点.汽车稳定性控制系统常见的名称有 ESP(Electronic Stability Program),ESC(Electronic Stability Control),DSC(Dynamics Stability Control)等.鉴于汽车电子稳定系统在提高汽车安全性方面的巨大优势,美国国家高速公路交通安全局 NHTSA于 2007年 4月出台了全球第一部有关 ESC的法规和标准——FMVSS126[1].按照该法规的规定,从 2011年 9月 1日起,在美国市场上销售的所有载荷低于 4536kg的汽车必须装备 ESC.
鉴于国外关键技术的保密以及 ESC在提高汽车安全性方面的巨大优势和潜力,我国有必要开展汽车电子稳定系统基础理论和控制方法的研究.到目前为止,清华大学、吉林大学等高校已开始该领域的研究和探索,并取得阶段性的进展[2].本文基于滑模控制理论,采用等速趋近律完成了直接横摆力矩控制(DYC,Direct Yaw Moment Control)滑模控制器的设计,并通过李雅普诺夫函数证明了控制系统的稳定性,最后通过系统仿真在不同附着系数路面和驾驶员操作工况下验证了该控制器的有效性.
1 DYC简介
在 ESC的控制算法中,DYC是目前最为典型的控制方法之一.DYC以汽车运行时实际状态变量值和期望状态变量值的误差作为控制量,利用差压制动和/或与发动机通讯来改变驱动力矩的控制方法,产生维持汽车稳定性所需的附加横摆力偶矩,防止汽车在行驶过程中出现过多转向或不足转向等危险工况,保证行驶的安全性.图 1为DYC系统结构图.
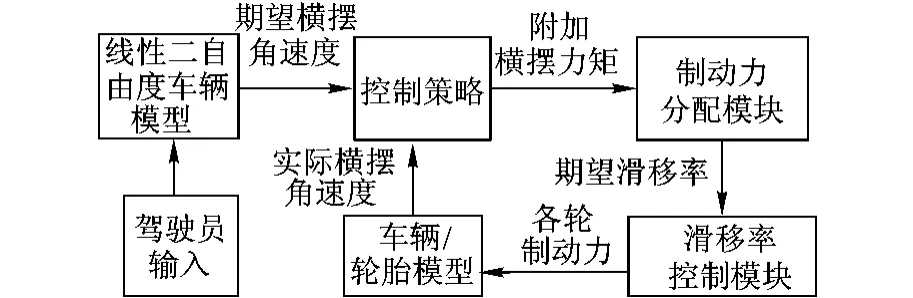
图1 系统结构图
2 汽车动力学模型
2.1 整车动力学模型
汽车动力学模型是进行汽车 DYC系统控制方法研究、验证控制策略及后续硬件在环仿真实验的基础.在 DYC系统中的动力学模型必须同时具备足够简单以满足实时性要求和复杂度适中以充分体现汽车运动真实性要求的特点.为此采用7自由度非线性汽车模型,具体公式可参见文献[2].模型中还考虑了由于汽车纵向和侧向加速度引起的载荷转移,以更加真实地接近汽车的动力学特性.
2.2 轮胎模型
Dugoff模型假设轮胎接地印迹区内垂直力均匀分布.与 Pacejka和与魔术公式轮胎模型相比,Dugoff模型的优点在于它是根据力的平衡推导出的解析模型.更进一步,侧向力和纵向力与轮胎/路面摩擦系数是有可用显式表达的直接关系.因此,本文选用 Dugoff轮胎模型.下面给出模型的表达式并予以说明.
用 Kx表示轮胎纵向刚度,Cα表示轮胎侧向刚度,α为侧偏角.轮胎纵向力和侧向力分别为

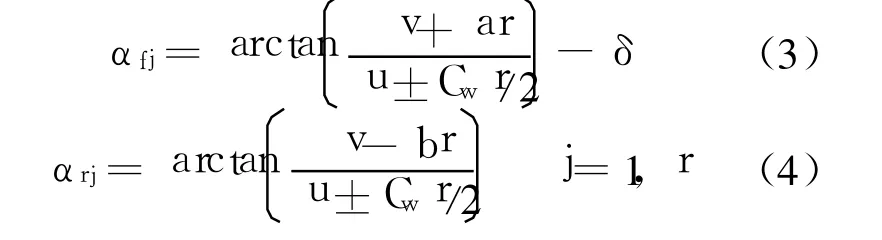
轮胎侧偏角计算式为
车轮滑移率计算式为
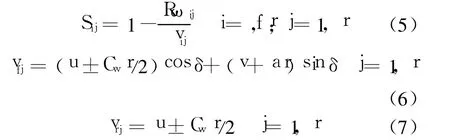
式中,s表示各轮滑移率;v表示各轮沿轮平面方向的速度;Fz为轮胎法向载荷;λ和摩擦系数 μ有关,它与函数 f(λ)分别定义为
通过上述表达式可以计算出轮胎受到的纵向力和侧向力.
3 控制器的设计
3.1 滑模控制器
滑模控制(SMC,Sliding Mode Control)与其他控制的区别在于系统“结构”的不固定,其结构可以在动态过程中,根据系统当前的状态(偏差及其各阶导数等)有目标地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动[3].由于滑动模态可以事先设定且与被控对象参数及扰动无关,这就使得滑模变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辨识、实现简单等优点.
滑模控制器的设计分为 4部分:控制系统所需的理想汽车模型和控制变量期望值的确定、滑模面的确定、滑模控制律的推导和系统稳定性证明.
1)简化的汽车和控制变量期望值
可利用线性二自由度汽车模型构建控制系统.该模型可定性描述轮胎在线性区间内整车的转向特性,表征了汽车操纵稳定性与横摆角速度r和质心侧偏角 β之间的关系.在二自由度模型上增加一个附加的横摆力矩 Mu,可以得到
式中,Mu为附加的补偿控制力矩输入;a,b分别为汽车质心至前轴和后轴的距离;L为轴距;I为汽车绕 z轴的转动惯量;δ为前轮转向角;m为汽车质量;u为汽车纵向速度;k1,k2分别为前后轴的侧偏刚度.
令式(10)中的β·=0,r·=0可以得到,当汽车进行稳态转向时的横摆角速度即期望的横摆角速度:

式中 K为稳定性因数.
DYC系统就是要使得汽车在转向过程中实际的横摆角速度能够跟随理想横摆角速度值的变化趋势.
2)滑模面的设计
为使汽车行驶过程的实际横摆角速度跟踪理想横摆角速度值,保证汽车行驶过程中,轮胎始终处于线性特性的范围,希望使得实际和理想横摆角速度的跟踪误差 e=r-rd=0,为此定义滑模面为

当 s→0时 ,可得 e→0,e·→0,根据式 (9)~式(11)得
根据式(10)得
其中

因为 Mu未知,所以不能利用式(10)来计算r·,在此使用全程快速微分器,根据实际的横摆角速度r直接得到横摆角加速度估计值r^·,以r^·来替代r·,可以证明r^·在有限时间内逼近r·[4].
3)滑模控制律
为抑制滑模控制的抖振现象,本文采用等速趋近律来设计滑模控制律[4],令

结合式(12)~式(14)得控制律为

对 M·u积分即可得到汽车 DYC维持汽车稳定性行驶所需要的附加横摆力矩 Mu.
4)稳定性证明
定义 李雅普诺夫函数为

将控制律式(17)代入式(19)得
证毕
3.2 PID控制器
PID(Proportional-Integral-Derivative)控制是应用最成熟的控制策略[5],它具有结构简单、鲁棒性好、适应性强等特点,被广泛应用于过程控制和运动控制中,尤其适用于可建立精确数学模型的确定性系统,是实际应用最为广泛的控制技术.但对于汽车这类非线性、时变系统,难以建立精确的数学模型,为了得到满意的控制效果,需要对各种不同的工况进行 PID控制参数的整定.
Simulink Response Optimization是一个在Simulink模型中调节设计参数的工具,它与 Simulink模型结合在一起,根据用户定义的时域内性能指标约束,自动优化系统参数.该工具支持连续、离散以及多速率的模型,并可以通过蒙特卡罗仿真处理模型中的某些不确定量.本文中利用此工具模块,针对测试的几种工况对 PID的控制参数进行了优化.经过参数优化的 PID控制器将与 SMC在相同工况下进行控制效果的对比试验.
4 DYC控制仿真及其结果分析
利用设计的 PID控制器、SMC和建立的汽车动力学模型,进行了 DYC控制的仿真测试.测试工况分别为高附着系数(0.85)路面、高速(30m/s)移线操作和低附着(0.25)、中速(20m/s)移线操作.仿真测试结果分别如图 2、图 3所示.从图2、图 3的结果曲线上可以看出,无论是高附着还是低附着路面,或是高速、中速工况,未加控制的汽车横摆角速度会迅速增大,汽车发生失稳,经过参数优化的 PID控制器和 SMC可较好地实现期望值的跟踪,均有较好的控制效果.
由于PID控制器需要针对特定的工况进行反复的参数优化整定,而 SMC一旦设计好之后,无论何种工况,只要其干扰因素未超过阈值,SMC均能产生合适的横摆力矩使得实际的横摆角速度跟随期望值,并且不会受到路面附着系数和操作工况等因素的影响,具有很好的鲁棒性.从图 2、图 3中也可看出,SMC响应曲线的超调量要小于PID控制器,而且 SMC的控制曲线更平滑.
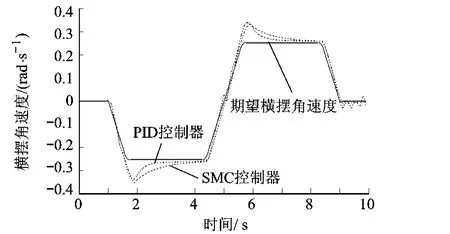
图2 高附着系数(0.85),30m/s移线操作
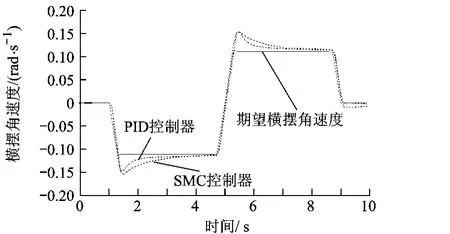
图3 低附着系数(0.25),20m/s移线操作
4.1 SMC的相轨迹
图4、图 5为 SMC的相轨迹图.图中清晰地表明,无论汽车的运动从何点开始,本文所设计的SMC均可将其运动轨迹“吸引”到滑模面 s=0附近,并在有限时间到达并保持事先设定的滑模状态,即e→0,e·→0,从而实现系统的收敛.这说明了所设计的 SMC是有效的.
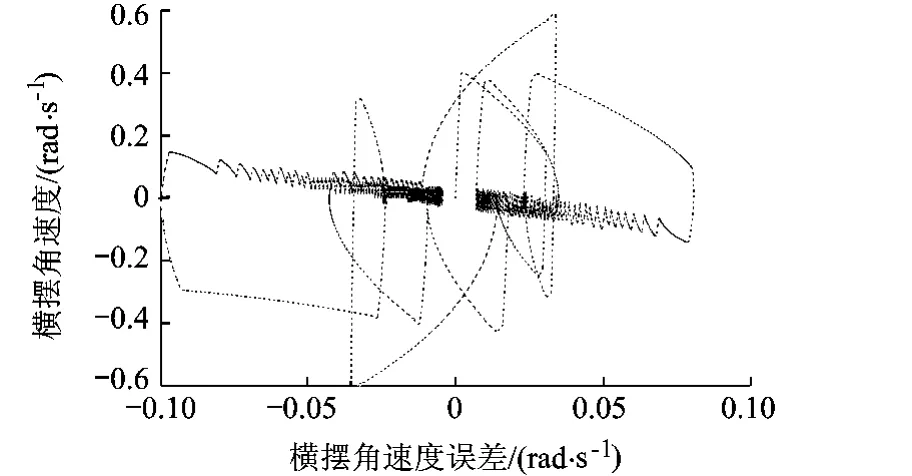
图4 高附着系数(0.85),30m/s移线操作
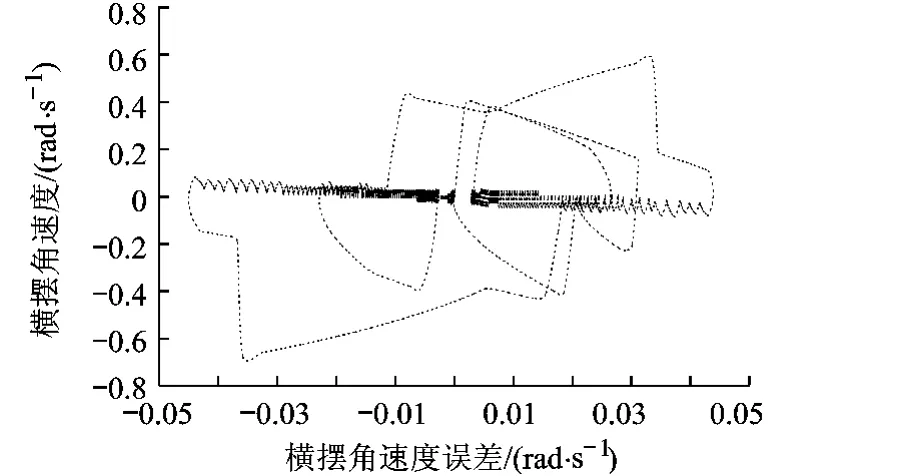
图5 低附着系数(0.25),20m/s移线操作
4.2 相平面曲线
相平面法是一种在时域中求解二阶微分方程的图解法.它不仅能分析系统的稳定性和自振荡,而且能给出系统运动轨迹的清晰图像,因此相平面法也被广泛地应用于汽车稳定性的研究.相平面的选择有 2种:①质心侧偏角和横摆角速度的稳定域;②质心侧偏角和质心侧偏角速度的稳定域.为了能够更加清晰地对比 PID控制器和 SMC的控制效果,本文将 PID和 SMC 2种控制器的 2种相平面结果均做了对比试验.图 6、图 7为质心侧偏角和质心侧偏角速度的相平面图,图 8、图 9为质心侧偏角和横摆角速度的相平面图.
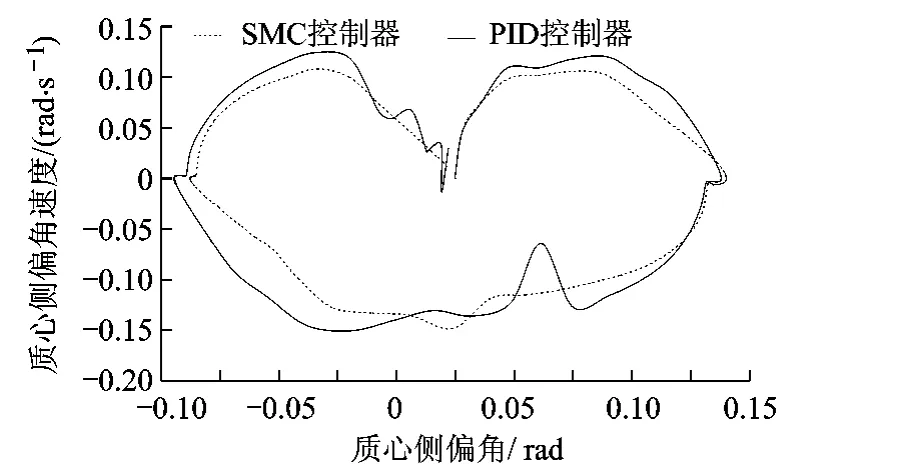
图6 相平面图(u=30m/s,μ=0.85)
图6~图 9中的对比曲线可以得出如下结论,PID控制器与 SMC均可以使汽车在稳定区域内运动,获得了较好的稳定性控制效果;SMC的相轨迹较 PID控制器的要平滑,说明 SMC的效果要比 PID控制器的控制过程更平稳;从图中还可以看出无论何种工况下 SMC的超调量要小于PID.

图7 低附着系数(0.25),20m/s移线操作

图8 高附着系数(0.85),30m/s移线操作
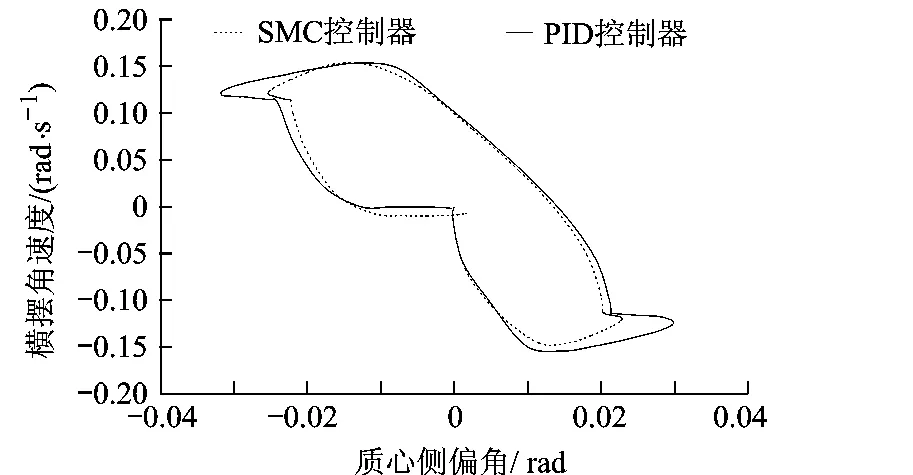
图9 低附着系数(0.25),20m/s移线操作
5 结 论
本文在建立了 7自由度汽车动力学模型的基础上,针对汽车动力学稳定性试验的典型工况,对PID,SMC的控制效果进行对比试验,并利用相平面对结果进行了分析.主要结论如下:
1)本文在研究汽车动力学的基础上,设计的滑模控制器可以很好地兼顾滑模的鲁棒性优势并最大程度上减小了颤振.并通过李氏函数证明其稳定性,仿真测试结果也表明在控制过程中,系统的运动点均在滑模面 s=0附近运动.
2)实验曲线表明,经过参数整定的 PID控制器和 SMC均可以明显改善汽车在高速转向时的行驶稳定性,使得汽车的实际横摆角速度很好地跟随横摆角速度期望值,并可在低附着系数路面上最大限度实现驾驶员的驾驶意图,明显改善了汽车的操纵稳定性.进一步可以看出,SMC的跟踪特性、对路面附着系数变化扰动的鲁棒性要优于 PID控制器.
3)从汽车动力学稳定性测试常用的两种相平面曲线结果分析表明,SMC的超调量、平稳性要优于 PID控制器,从另一个层面上体现了 SMC作为 DYC控制算法的优势.
References)
[1]黄炳华,陈祯福.ESC的最新动向和发展趋势[J].汽车工程,2008,30(1):1-9 Huang Binghua,Chen Zhenfu.The current situation and development trends of ESC[J].Automotive Engineering,2008,30(1):1-9(in Chinese)
[2]李亮,宋健,祁雪乐.汽车动力学稳定性控制系统研究现状及发展趋势[J].农业机械学报,2006,37(2):141-144 Li Liang,Song Jian,Qi Xuele,et al.Investigation and development of vehicle dynamics stability control system[J].Transactions of the Chinese Society for Agricultural Machinery,2006,37(2):141-144(in Chinese)
[3]刘金琨.滑模变结构控制 Matlab仿真[M].北京:清华大学出版社,2005:4-18 Liu Jinkun.Matlab simulation for sliding mode control[M].Beijing:Tsinghua University Press,2005:4-18(in Chinese)
[4]Wang Xinhua,Chen Zengqiang,Yang Geng.Finite time convergent differentiator based on singular perturbation technique[J].IEEE Transactions on Automatic Control,2007,52(9):1731-1737
[5]杨智,朱海锋,黄以华.PID控制器设计与参数整定方法综述[J].化工自动化及仪表,2005,32(5):1-7 Yang Zhi,Zhu Haifeng,Huang Y ihua.Recent studiesofPID design and parameter tuning method[J].Control and Instruments in Chem ical Industry,2005,32(5):1-7(in Chinese)
(编 辑 :张 嵘)
Vehicular DYC via SMC and system stability analysis
Zhang Wei Ding Nenggen Wang Jian Yu Guizhen
(School of Transportation Science and Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Directyaw moment control(DYC)can generate the additional yaw-moment needed to maintain vehicle stability in the limit conditions so to improve the active safety of a vehicle's hand ling.A nonlinear vehicle dynamic model which meets the requirements of vehicle stability control experiments was established,and a sliding mode controller(SMC)was designed.The stability of the SMC controller was proved with Lyapunov function.At last the stability and control effectof the SMC was verified by simulations in Matlab/Simulink.The simulation results prove the effectiveness of the control algorithm and suggeste that the robustness of SMC is better than that of proportional-integral-derivative(PID)control algorithm,which proves SMC better application potential.
direct yaw moment control;sliding mode controller;stability analysis
U 461.6
A
1001-5965(2010)11-1353-05
2009-06-16
国家自然科学基金资助项目(50908008);国家“863”计划资助项目 (2009AA 11Z216)
张 为(1981-),男,陕西三原人,博士生,zhw@ae.buaa.edu.cn.
猜你喜欢
昆明医科大学学报(2022年3期)2022-04-19
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
石油沥青(2021年4期)2021-10-14
矿产勘查(2020年9期)2020-12-25
中国惯性技术学报(2019年6期)2019-03-04
中学课程辅导·教师通讯(2018年10期)2018-09-04
北京航空航天大学学报(2017年4期)2017-11-23
中学生数理化·高一版(2017年3期)2017-07-08
北京航空航天大学学报(2016年7期)2016-11-16
现代防御技术(2016年1期)2016-06-01