可编程序控制器在挖泥船上的应用
2010-04-01 13:37黄兵
江苏船舶 2010年1期
黄 兵
(江苏省船舶设计研究所有限公司,江苏镇江 212003)
0 引言
20世纪 70年代发展起来的可编程序控制器(简称PLC)是大规模集成电路成功开发以及计算机通信技术和计算机控制技术发展相结合的产物。PLC主要功能有逻辑运算、计时、计数算术运算、通信等,其功耗低、速度快、功能强、使用灵活、体积小、输入采用光电隔离、输出采用继电器隔离,抗干扰能力和可靠性都达到了很高的水平。PLC已广泛应用于各个工业控制领域,在挖泥船上也得到了很好的应用。本文以西门子PLC为例进行叙述。
1 小型挖泥船的控制
挖泥船的液压系统由液压泵站、液压阀站、液压管路、液压执行机构、挖泥操纵台组成。施工人员在操纵室操纵台旁就可以控制挖泥船各个机构协调工作,挖泥船的各种动作是通过大量电磁阀通断的不同组合完成的。如 20世纪 90年代某类小型挖泥船,其装机功率不大,液压阀站的电磁阀数量不是很多(40~50个),控制类型都是开关量,没有模拟量参与控制,也没有时间继电器参与控制,挖泥船液压阀站电磁阀控制采用多层组合开关直接控制电磁阀通电、断电。多层组合开关直接控制电磁阀简单明了,有一般电工知识的船员就可维修。多层组合开关直接控制电磁阀有上述优点,但其缺点就是易出故障,可靠性不高,影响了挖泥船的持续工作。挖泥船工作时有的动作需要许多电磁阀通电工作,组合开关层数越多越易损坏,特别是操作组合开关时每层受力不一样,还有多层组合开关不能直接应用,必须按电磁阀工作状态励磁表接通组合重新排布组合开关的每层弹子,这样就要拆开开关排弹子,既麻烦又易损坏。总之多层组合开关直接控制电磁阀在组装时以及挖泥船使用时故障率较高、可靠性差、日常维护工作量大,常造成挖泥船停工,降低了挖泥船的效率。针对上述缺点,有必要用更可靠的器件对挖泥船液压泵站电磁阀进行控制。
1999年“百船办”“河湖疏浚挖泥船建造项目”的200m3/h(分体)绞吸挖泥船的液压泵站电磁阀的控制以及机舱报警监控选用了西门子 S7-200系列PLC。通过设计操纵台,编制程序,调试及挖泥试验后,结果非常理想,达到了设计要求。200m3/h (分体)绞吸挖泥船的液压控制原理图如图 1所示。
2 中型挖泥船的控制
中型挖泥船的液压泵站与前面叙述的小型挖泥船有许多不同。中型挖泥船的液压泵站电磁阀一般有 70~80个,有的系统需要采集模拟量参与液压控制。
如2 000m3/h挖泥船的液压泵站电磁阀有 70个,需要采集 7个模拟量,命令输入及限位输入 50个,所以共有127个点。该船选用 S7-200系列可变程序控制器组成液压控制系统,液压控制系统原理图如图 2所示。
以左操纵台的PLC作为主站,右操纵台的PLC作为从站,主站与从站进行点对点通信。该船的液压控制系统与小型挖泥船的液压控制系统所用的PLC都是西门子S7-200系列的PLC,只是2 000 m3/h挖泥船的输入输出点数增加了许多,并且用了模拟量参与控制。西门子S7-200系列的CPU224及CPU226可编程可连接 7个扩展模块,最大可扩展的数字量输入/输出范围 CPU224是 168点, CPU226是 248点。但此控制系统也有缺点,其一是系统构成比较死板,S7-200系列的PLC输入输出点都在一个模块上,限位信号输入电缆、驱动电磁阀输出电缆均要进出操纵台,整个操纵台的电缆非常多,造成了操纵台制造安装困难,调试也困难;其二如果要控制的液压泵站电磁阀数量很多,参与控制的模拟量也多,S7-200系列可变程序控制器不论怎样扩展也不能胜任液压系统的控制工作。基于上述原因3 500m3/h绞吸挖泥船选用了 S7-300系列可变程序控制器构成挖泥船液压控制系统。
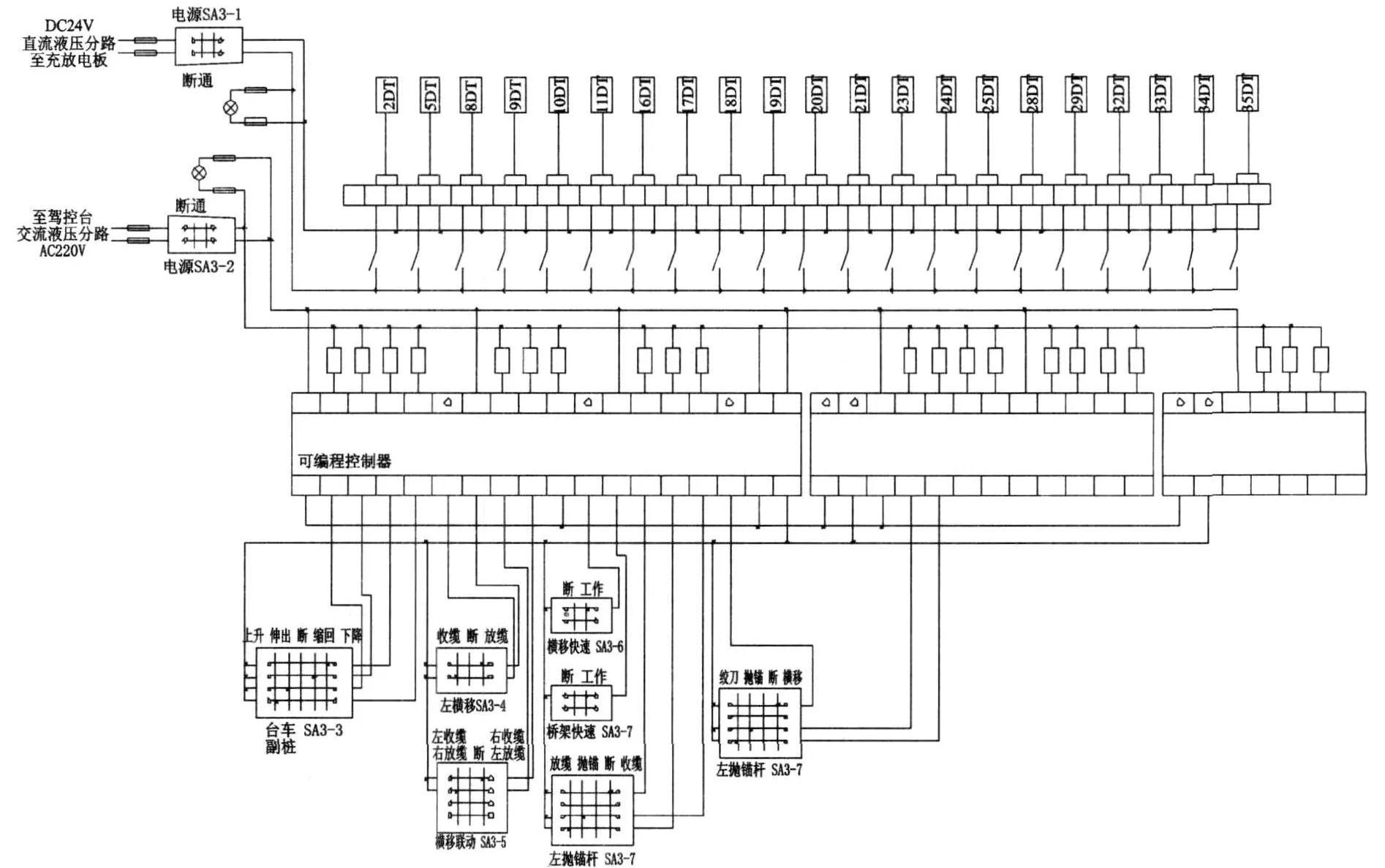
图1 200m3/h(分体)绞吸挖泥船液压控制原理图
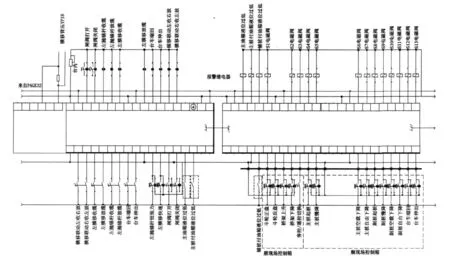
图2 2 000m3/h液压挖泥船系统原理图
西门子 S7-300系列可变程序控制器是中型PLC,S7-300具有模块化、无排风结构,易于实现分布式的配置(这点很重要)。S7-300可编程控制器可配各种各样的功能模块和输入输出模块,S7-300可编程控制器的系统一般由PS电源模块、CPU模块、IM接口模块、SM信号模块(输入输出模块)、FM功能模块、CP通信模块组成。
3500m3/h绞吸挖泥船的部分液压系统控制原理图如图3所示,机舱监控室PLC输出柜原理图如图4所示。
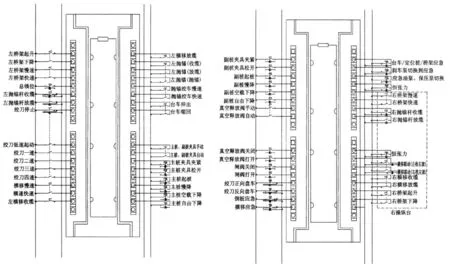
图3 3500m3/h绞吸挖泥船部分液压系统控制原理图
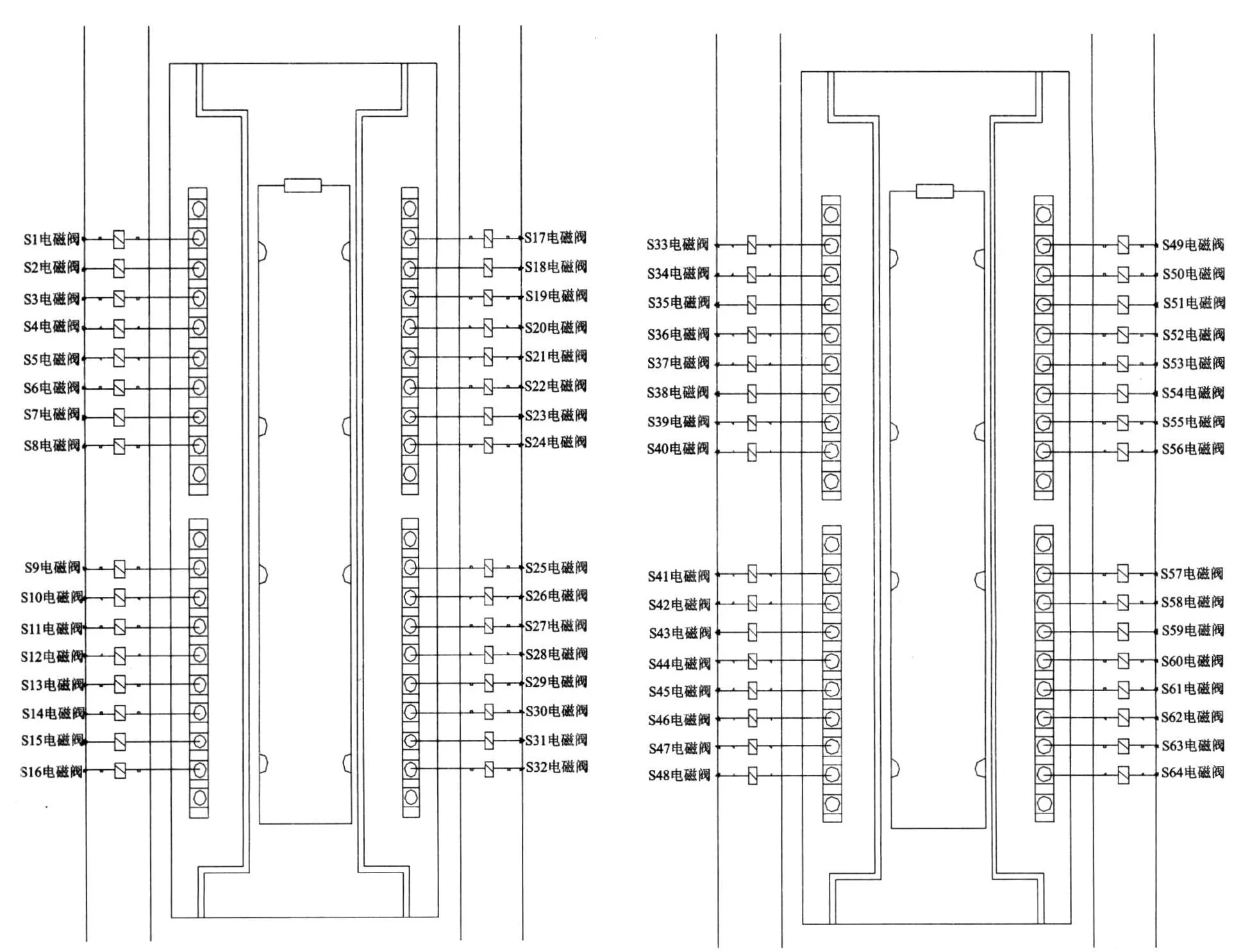
图4 机舱监控室PLC输出柜原理图
S7-300组成的液压控制系统非常合理,液压系统的动作命令由操纵台发出,所以输入模块SM321安装在操纵台内,操纵台上的许多指示灯由PLC输出驱动,部分输出模块SM322也安装在操纵台内,参与控制的模拟量输入模块安装在操纵台内;驱动液压泵站电磁阀的模块 SM322组合在一起与SIMATIC ET200(PROFIBUS-DP分布式I/O)构成PLC输出柜,S7-300的PLC通信功能强大,操纵台作为主站,PLC输出柜作为旁站,主站通过PROFIBUS-DP电缆与PLC输出柜组成PROFIBUS网络。其实S7-300模块组态时非常灵活,各输入模块可安装在操纵台内,也安装在PLC输出柜内;同样各输出模块可安装在操纵台内也可安装在PLC输出柜内,在设计液压控制系统时应综合考虑模块的安装位置。
3 500m3/h绞吸挖泥船的操纵台进出电缆少,较简洁。操纵台发出的各动作指令经CPU处理后通过PROFIBUS-DP电缆传送到机舱监控室PLC输出柜直接驱动液压泵站电磁阀。另外在操纵台上配置了上位计算机,该计算机与S7-300通信直接调取PLC系统的输入输出状态以及模拟量在计算机人机界面上显示。该船投入使用后船东很满意。
3 大型挖泥船的控制
这些年我国建造了许多大型耙吸式挖泥船,如新海虎 13 500m3、新海凤 16 888m3、新海牛10 000 m3、新海马 10 000m3等。这类大型挖泥船控制较为复杂,整船的监控系统已进化为全船复合集成自动化监控系统,复合集成自动化监控系统是基于工业控制以太网技术、现场总线技术、计算机控制技术、智能仪器仪表技术的复合集成化监视与控制系统。我国自主研发具有自主知识产权的这类复合集成自动化监控系统已广泛应用于大型耙吸式挖泥船,而系统的价格只有同类进口产品的 1/4。
耙吸式挖泥船的复合集成自动化监控系统主要由以下子系统组成:
集成耙吸挖泥船控制系统IHDCS(Integrated Hopper Dredger Control System)、报警监测系统AMS (Alarm and Monitoring System)、驾驶室疏浚控制台PLC控制系统、艏/艉液压及疏浚机械PLC控制系统、泥泵控制PLC控制系统、视频监控系统、挖泥船综合显示系统。
大型耙吸式挖泥船集成监控系统复杂,要监控的点数众多,AMS系统的总点数将近 900个,挖泥疏浚系统的电磁阀将近 300个,挖泥疏浚系统的泵站液压电磁阀分散在全船几个区域,液压PLC控制系统可分为几个PLC子系统,所有PLC子控制系统通过网络组成一个系统。大型耙吸式挖泥船的控制系统可选用西门子S7-300系列及S7-400系列可编程控制器组成挖泥船控制系统。系统编程一般有2种方法,1个是线性化编程,另 1个是结构化编程。简单的控制系统使用线性化编程;复杂的控制系统使用结构化编程方法。大型耙吸式挖泥船的控制系统选用西门子S7-300系列及S7-400系列可编程控制器组成挖泥船控制系统时,编制程序采用结构化编程方法更方便。
猜你喜欢
水运工程(2022年3期)2023-01-08
低温与特气(2022年2期)2022-11-26
机械制造(2022年3期)2022-04-07
中国军转民(2021年11期)2021-12-13
锻压装备与制造技术(2020年2期)2020-05-12
科技风(2018年6期)2018-10-21
发明与创新·大科技(2016年11期)2016-11-19
电子制作(2016年21期)2016-05-17
船海工程(2015年4期)2016-01-05
中国船检(2012年12期)2012-01-13