
基于阻抗控制的机器人力控制算法性能分析
2010-04-11 08:06王芳,杨振
制造业自动化 2010年9期
王 芳, 杨 振
WANG Fang, YANG Zhen
(枣庄学院 计算机科学系,枣庄 277160)
基于阻抗控制的机器人力控制算法性能分析
The research on the performance of robot force control based on the impedance control
王 芳, 杨 振
WANG Fang, YANG Zhen
(枣庄学院 计算机科学系,枣庄 277160)
Hogan提出的阻抗控制算法由于必须要求机器人准确的动力学方程,在实际工程背景中很难应用。本文针对其弊端,研究了自适应阻抗控制算法。以平面机械手为控制对象,使用以上两种控制方法对其加以控制,从而详细分析比较了两种算法的性能优劣。最后,针对阻抗控制算法在实际运用中阻抗参数的调整原则一直是比较困难的问题,本文通过仿真实验总结了调参规律。
阻抗控制;参数调整; 机器人; 阻抗参数
0 引言
力控制在机器人控制中是目前为止一种复杂的控制算法。特别是机器人与接触环境时,由于要跟踪期望的轨迹的同时还要保持期望的力,任务的难度可想而知。阻抗控制算法[1]是近年来许多文献[2~4]中广为研究的算法。通过设定阻抗函数,由力、速度、位置的误差来实现该函数。但它必须要求建立机械手精确的动力学模型,然而这一点在实际工程中是很难做到的。自适应阻抗控制算法[5]的主要思想是在跟踪环境位置时,通过自适应增益来减小力误差,该算法不需要获得环境刚度的知识,所以无论对机器人动力学模型,还是对未知的环境位置或刚度该算法都有一定鲁棒性。
1 自适应阻抗控制算法[5]
自适应阻抗控制算法的结构图如图1所示。
根据机械手阻抗函数关系式为:

其中当Xr=Xe时E=Xe-X,Xe是环境位置。为讨论的减化起见,我们假设仅在一个方向上受力。令fd,fe,m,b,k是矩阵Fd,Fe,M,B,K的对应元素,所以(1)式可写为:


图1 自适应阻抗控制算法的结构图
考虑到机器人实际的工作情况,我们只能得到环境位置的估计X'e,它是不精确的。令δXe=X'e-Xe,以此来表示与精确环境信息Xe的误差,当设计控制器时,可以用确定的值来代替。设e'=e+δXe,则:

对机器人在自由空间的运动(3),文[5]的分析表明:当δXe<0时,机器人末端不能保证一直与环境接触;当δXe>0时,可以保证持续的接触。因此为了保证末端与环境能一直接触上,对X'e的估计应略大一些以始终获得δXe>0来保证机器人能与环境接触上。对接触空间(4),设计以下的自适应阻抗方程来保证力误差的稳定性:



2 仿真研究
本文采用平面2R机械手的动力学模型可得到该机械手的惯性矩阵为:

且其质量为:同m1=m2=1KG,连杆长度为:I1=I2=1m。将这些参数带入到惯性矩阵中得:


2.1 控制算法对不连续变化环境刚度的适应性比较

图2 力响应曲线


表1 性能指标
可以看出:
1)自适应算法具有较强的稳定性,对不同的刚度在经过一段时间的适应后都能稳定到给定的力上。阻抗算法对不同的刚度虽然经过一段时间的调节后也可以控制接触力稳定下来,但稳定到达的值却不同。
2)在各个刚度值上自适应算法的力峰值均较阻抗算法时小。
3)阻抗算法的调节时间在前两个刚度值上较自适应算法短;而在刚度为50000时,自适应算法在调节时间上更优越,这是因为这时自适应算法的阻尼参数600可使得系统更接近临界阻尼状态的缘故。
2.2 控制算法对连续变化环境刚度的适应性比较
下面考察当环境刚度为连续变化的值时,各算法对力控制的情况。取环境刚度Ke为:

图3 力响应曲线

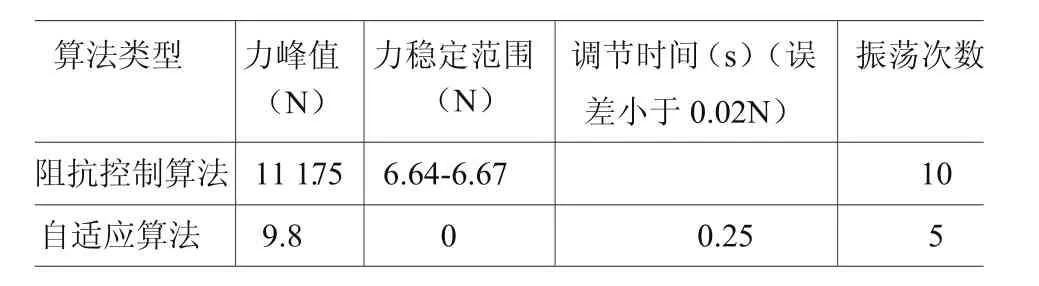
表2 性能指标
由图表可以看出:传统的阻抗算法无论在力峰值上还是在调节时间上的性能指标均不如自适应算法,自适应算法的振荡次数要远小于阻抗算法,说明其达到稳态值的过程相对平滑,对机器手末端及环境的损伤相对较小。
2.3 控制算法在力与位置垂直正交情况下同时跟踪控制的性能比较

表3列出了两个算法各自的性能指标。
由图4可以明显地看出自适应算法对给定的力10N的跟踪较好,能迅速的稳定在10N左右。而阻抗算法达到稳态后,力的振荡范围较大,很难控制在一个较小的范围内。总之,在该例条件较为复杂恶劣的情况下,即:在x方向上环境刚度连续变化的条件下,在该方向上力控制,同时y方向上跟踪不断变化的位置,自适应算法表现出了较强的稳定性,比阻抗算法的性能要好的多。
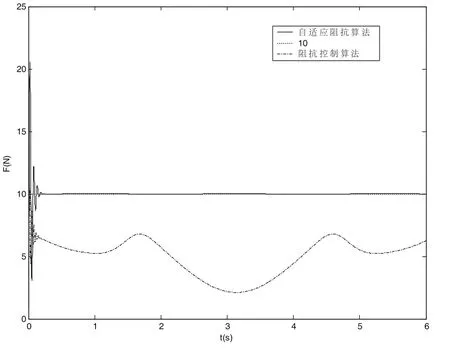
图4 力响应曲线

表3 性能指标
3 阻抗参数调整规律
合理的调节阻抗参数会使机械手带有一定的柔性,从而达到减小机械手对环境冲击的目的,也尽量保护了机械手和环境。通过以上仿真实验,得到以下阻抗参数的调整原则:

3)对于阻抗参数B来说,由于它是阻尼参数,它的增大或减小一般不会使接触力的稳定值变化,只会使机械手与环境接触时的过程发生变化。一般来说,增大阻尼参数B,会使力响应的超调减小,力峰值显著下降;但过大的阻尼参数会使力响应达到稳定的时间变慢。
4)阻抗参数K是反映机械手刚度变化的量,它的调整直接反映了机械手在与环境接触时是呈现刚的特性还是呈现柔的特性。一般来说,减小刚度参数K会使机械手与环境的接触力变小,增大刚度参数会使机械手与环境的接触力变大。但刚度参数的调整要尽量的使系统处于临界阻尼或过阻尼状态,这样才能既保证机械手与环境接触力的稳定值较小,又保证接触瞬间的力峰值较小。
[1] Hongan N.Impedance Control An Approach To Manipulation:'Part I-theory,Part II-implementation,Part III-Applcation[J].J Dyn Sys Meas Cont,1985:1-24.
[2] Seul Jung,T.C.Hsia a,R.G.Bonitz.Force Tracking Impedance Control for Robot Manipulators with an Unknown Enviro nment:Theory,Simulation,and Experiment[J].International Journal of Robotic Research.2001,20(9):765-774.
[3] 罗翔,颜景平.冗余度机器人的非接触阻抗控制[J].制造业自动化,2003,25(9):19-22.
[4] Yang Zhen,Li Mu-hai.A Method on Impedance Control of Robots Based on the Neural Network. The proceedings of 2008 4th international conference of intelligence information hiding and signal processing.2008.8:1433-1436.
[5] Seul Jung,T.C.Hsia,R.G.Bonitz.Force Tracking Impedance Control of Robot Manipulators Under Unknown Environment[J].IEEE Transaction on Control Systems Technology.2004,12(3):474-483.
TP242.2
A
1009-0134(2010)09-0140-04
10.3969/j.issn.1009-0134.2010.09.43
2010-06-05
山东省教育厅高等学校科研项目(J09LG57);山东枣庄学院科研项目
王芳(1973 -),女,山东济宁人,讲师,硕士,研究方向为智能控制、算法分析。
猜你喜欢
今日农业(2021年10期)2021-11-27
石油沥青(2021年1期)2021-04-13
空间科学学报(2020年4期)2020-04-22
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
考试周刊(2017年7期)2017-02-06
制冷技术(2016年4期)2016-08-21
中国卫生(2015年3期)2015-11-19
舰船科学技术(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
