
基于TMS320DM642的摄像机自动调焦系统的实现
2010-05-11 08:26严龙军熊文卓
中国光学 2010年3期
严龙军,熊文卓
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院研究生院,北京 100039)
基于TMS320DM642的摄像机自动调焦系统的实现
严龙军1,2,熊文卓1
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院研究生院,北京 100039)
调焦系统在各种光学测量及侦察设备中起着十分重要的作用。本文介绍了光学系统自动调焦的方法和图像法调焦的相关评价函数,利用TMS320DM642数字信号处理芯片为平台设计了图像法自动调焦系统。采用TI公司针对其开发的DSP芯片设计了实时多任务系统DSP/BIOS,完成了软件设计。该实时操作系统为实现调焦过程中任务的调度和实时调焦提供了保障。文中还提出了在实现调焦系统过程中需要注意的一些问题及解决方案。本文所设计的系统能在4~5步(大约2s内)找到像面,满足实际应用的需要。
数字信号处理;摄像机;自动调焦系统
1 引言
成像质量的好坏直接关系到光学测量及侦察设备的测量结果。摄像机在对目标进行拍摄过程中,由于温度、大气压力和摄像距离的变化,会造成离焦现象。在条件允许时可以通过光学玻璃的匹配和机械结构的材料选择来补偿离焦量,但在大变倍比变焦距镜头中,受材料、加工工艺、重量体积的限制,很难用以上方法完全补偿,为此在镜头中常加入微调装置,带动调焦镜组沿轴向运动,来保证光学镜头总的离焦量在焦深之内,以满足摄像机成像质量的要求。
调焦可以通过手动和自动两种方法实现。对光学镜头进行手动调焦,其调节过程长,调焦精度受人员主观因素的影响较大。在观察目标时经常手动调焦,也容易分散观察者的注意力,影响对目标的捕获与观察。因此,由机器自动完成调焦工作,让使用者更专心于目标和景物的搜索和观察,是近年来摄像机发展的趋势。
随着计算机硬件和数字图像技术的飞速发展,图像的实时处理已成为可能,越来越多的调焦系统采用了基于图像处理的自动调焦。这种自动调焦具有以下两大优点:(1)调焦更加智能化,聚焦判据更加灵活多样;(2)利用DSP芯片可以很方便地对执行机构的运动进行控制,从而避开复杂的调焦电路和机构。针对空中对地观察的需要,本文设计了以TMS320DM642数字信号处理芯片为平台的图像法自动调焦系统,该系统能在4~5步(大约2s内)找到像面,满足实际应用的需要。
2 自动调焦方法
光学镜头的自动调焦一般通过以下3种方法实现:(1)通过红外光或超声波对目标进行测距,根据所得距离驱动电机调节镜头至聚焦位置;(2)利用图像处理方法获得相应信息去控制电机调节镜头至聚焦位置;(3)通过图像处理估计点扩散函数(PSF),并根据估计得到的PSF通过软件进行图像恢复。目前大部分数字摄像机采用方法(2),这是因为方法(1)需要红外光源或超声波源及相应的传感器,这使得自动对焦系统体积大,而且成本高;方法(3)则只能在比较小的离焦范围内起作用。
一幅图像是否对焦准确,反映在空间域上是图像的边缘及细节部分是否清晰,在频率域上是图像的高频分量是否丰富。前者可以通过对图像进行微分来获取图像的边缘及细节信息,后者可以对图像进行傅里叶变换(FFT)来获取图像的频谱信息。图像微分法能获得图像的边缘及细节信息,而且算法简单快速,但不能滤掉图像中的噪声。对图像进行FFT,然后通过带通滤波器,则能够在获取图像高频信息的同时滤掉更高频的噪声,但算法复杂耗时。本系统主要应用于空中对地的实时观察,希望调焦时间尽量短些,因此,不考虑采用耗时较多的频域法。该自动调焦系统基本原理是利用图像处理方法获得图像的微分幅值,并寻找相应幅值的最大值位置,而该幅值的最大值位置对应图像的最佳聚焦位置。
3 调焦评价函数
调焦评价函数在这里是指通过图像处理获取图像清晰度信息的数学表达式,其大致可以归结为灰度梯度函数、频域函数、信息学函数和统计学函数等几类。从调焦的复杂度和稳定性来说,灰度梯度函数比其它几类函数具有更好的实用性。以下是8种常用的灰度梯度函数。
(1)绝对方差函数:

(2)Brenner函数:又称为梯度滤波器法,它对相邻近的像元灰度进行平方求和:

式中k为像素之间的间隔,一般取k=1。
(3)Roberts梯度和函数:

Roberts梯度和函数实际上以某一点为中心上的连续梯度的近似,处理边缘特性时比绝对方差函数和Brenner函数要好。
(4)梯度向量模方函数:

(5)梯度向量平方函数:

(6)Variance函数:
它利用图像灰度的方差作为调焦评价函数,其表达式为:

式中u为评价区域内的像素灰度平均值。
(7)Tenengrad函数:
它利用Sobel算子来估计图像在水平方向和垂直方向的梯度,为使图像边缘的梯度放大,对梯度进行平方运算,其表达式为:

(8)Laplacian函数:
它利用Laplacian算子计算图像的二阶微分,其微分平方和作为最后评价结果,其表达式为:
4 自动调焦系统设计
为验证自动调焦系统的性能,找出满足使用要求的自动调焦算法和控制规律,搭建了自动调焦试验平台(如图1)。它由CCD摄像头、视频解码电路、数字信号处理器(DSP)处理电路、电机驱动电路、步进电机、调焦机构组成。在DSP的控制下由视频解码电路把全电视信号解码成数字信号,并通过DSP的视频口把解码后的数据存放到DSP的显示缓冲区中。DSP部分完成各部分的控制工作,并对视频缓冲区进行处理,判断具体的调焦方向和步距,然后通过步进电机的驱动电路控制步进电机转到要求的位置,完成调焦动作。
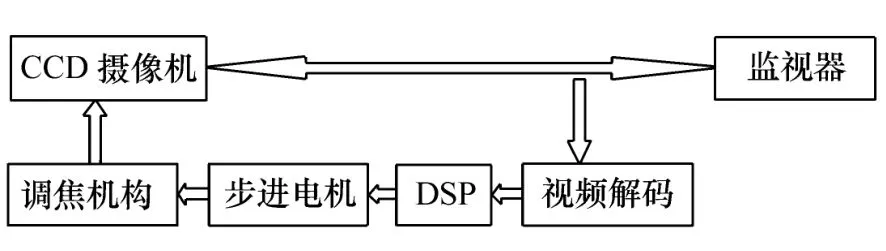
图1 自动调焦系统框图Fig.1 Schematic diagram of automatic focusing system
本系统的DSP选用了TI公司的TMS320DM642。该芯片因其基于TI公司开发的第二代高性能、先进的甚长指令字(VLIW)结构,成为数字媒体处理的最佳芯片选择。DM642在600MHz时钟下运算速度可高达每秒4 800百万条指令(MIPS),因此,可以提供节省时间的高速DSP编程。DM642有3个可配置的视频口外设(VP0、VP1、VP2),这些视频口提供对通用视频编码器及解码器的无缝连接接口,可作为视频采集口、视频显示口或者传输流(TSI)采集口。
TI公司为其开发的DSP芯片专门设计了一个尺寸可伸缩的实时内核DSP/BIOS。DSP/BIOS是为那些需要实时线程调度与同步、主机与目标DSP间通信或实时监测的应用而设计的。DSP/BIOS提供了抢占式多线程、硬件抽象、实时分析和配置工具。由于DSP/BIOS支持多任务的环境,为实现实时自动调焦提供了保证。在进行视频图像采集的间隙,可以通过任务切换实现电机的控制,而在电机的转动过程中,让该任务休眠,实现图像的采集。通过图像采集和电机控制这两个任务的协调工作,实现了实时的自动调焦过程。
5 图像预处理
在成像系统的自动调焦过程中,随着镜头位置的不断变化、视轴晃动或者照度波动,所获得的图像的平均亮度会有所改变。由于大部分成像系统具有自动调光功能,即使镜头处于同一位置所获得的两帧图像其亮度也有可能不同。亮度不同,即像素的灰度不同,会导致以灰度值为计算依据的调焦评价函数受到影响,使相对清晰的图像由于亮度较低,其评价函数值反而低于亮度较高的不清晰图像,由此调焦评价函数曲线出现局部峰值(即假峰)。因此,必须对图像灰度进行归一化。
图2(a)为同一视场连续采集100frame的图像,图2(b)调焦评价函数值。从实验结果可以看出上述原因导致的波动,同时该波动对调焦过程的稳定性会产生一定影响。为此在调焦过程中需要对计算调焦评价函数的位置进行连续采样,将所得调焦评价函数取均值,这样可大大减小所测数值的波动性,从而提高调焦函数输出值的稳定性。
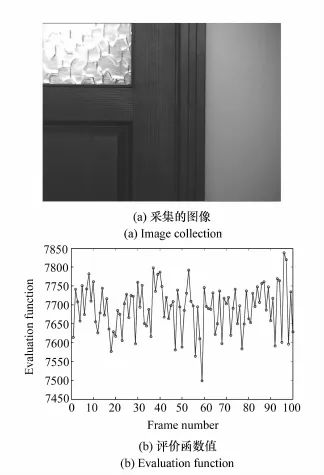
图2 采集的图像及其评价函数值Fig.2 Image collection and corresponding values of evaluation function
6 调焦评价函数的选取
自动调焦系统中,如何选取一个合适的调焦评价函数非常重要。理想的调焦评价函数应该具有以下几种特性:(1)无偏性,即只有在物平面与聚焦平面重合时,评价函数才达到极值;(2)单峰性,即评价函数在调焦范围内有且只有一个极值;(3)较高的信噪比,即在一定噪声干扰下,能够保证系统正确地检测到离焦信号;(4)计算量小,这是快速自动调焦的一个先决条件;(5)灵敏度高,即能够正确区分聚焦和轻微离焦,这是精确聚焦的内在要求。
大量实验表明,Variance函数具有较大的调焦范围,而且近似为线性变化,但是灵敏度较低,适于大范围粗调焦。梯度向量平方函数、Laplacian函数和Tenengrad函数调焦范围小、灵敏度高、稳定性好,适合于小范围精确调焦。
7 调焦实现
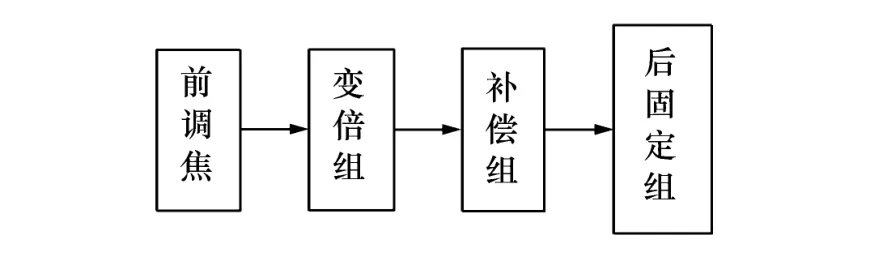
图3 带前调焦的摄像机光学系统框图Fig.3 Schematic diagram of optical system in camera with previous focusing
一般具有调焦功能的摄像机的光学系统在设计上采用如图3所示的变倍加补偿(机械凸轮或电子凸轮)的结构,在对远处目标进行观察时,补偿组可以配合变倍组的曲线进行离焦补偿,不需要前调焦。当需要对近距离目标进行观察时,补偿组不足以补偿掉所有的离焦量,这时需要用电机带动前调焦透镜移动来进行补偿,但这时离焦的范围比较窄,这样仅进行小范围的调焦就能达到调焦的目的。从几个小范围调焦的函数来看,梯度向量平方函数在计算量和稳定性上都比较具有优势,故本文选择该函数作为调焦的评价函数。图4为调焦过程中调焦评价函数变化趋势的示意图。
根据图4可以看出,远处目标的像面就落在限位位置一(Limit1)处,随着目标离摄像机距离的由远及近,像面向限位位置二(Limit 2)移动,于是很容易得到如图5所示的自动调焦程序流程。图5选用了经典的爬坡算法,根据上图进行编程,实现了基于图像处理的实时自动调焦过程,图6为调焦实验结果。
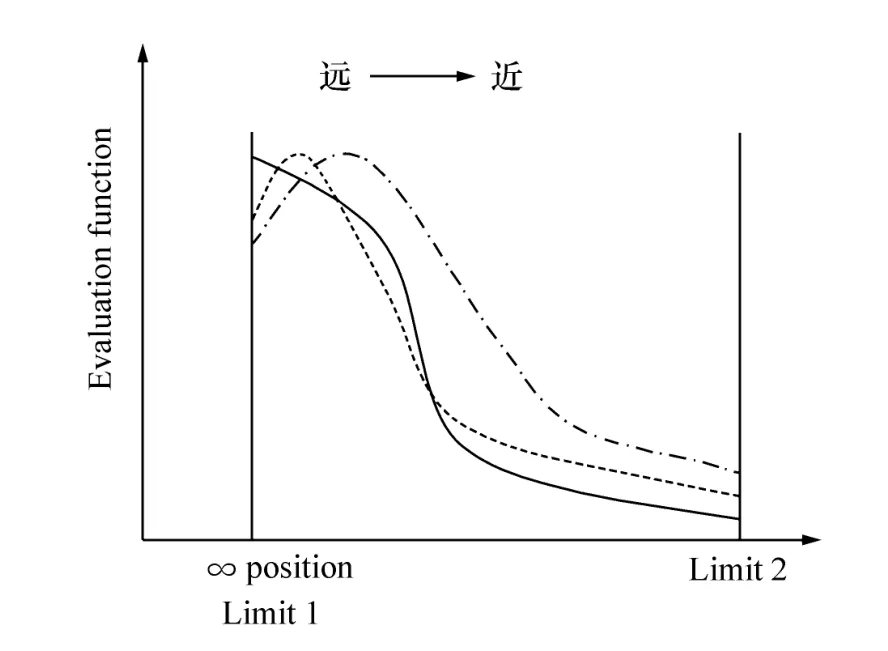
图4 调焦评价函数值变化趋势示意图Fig.4 Variation trend of focusing evaluation function
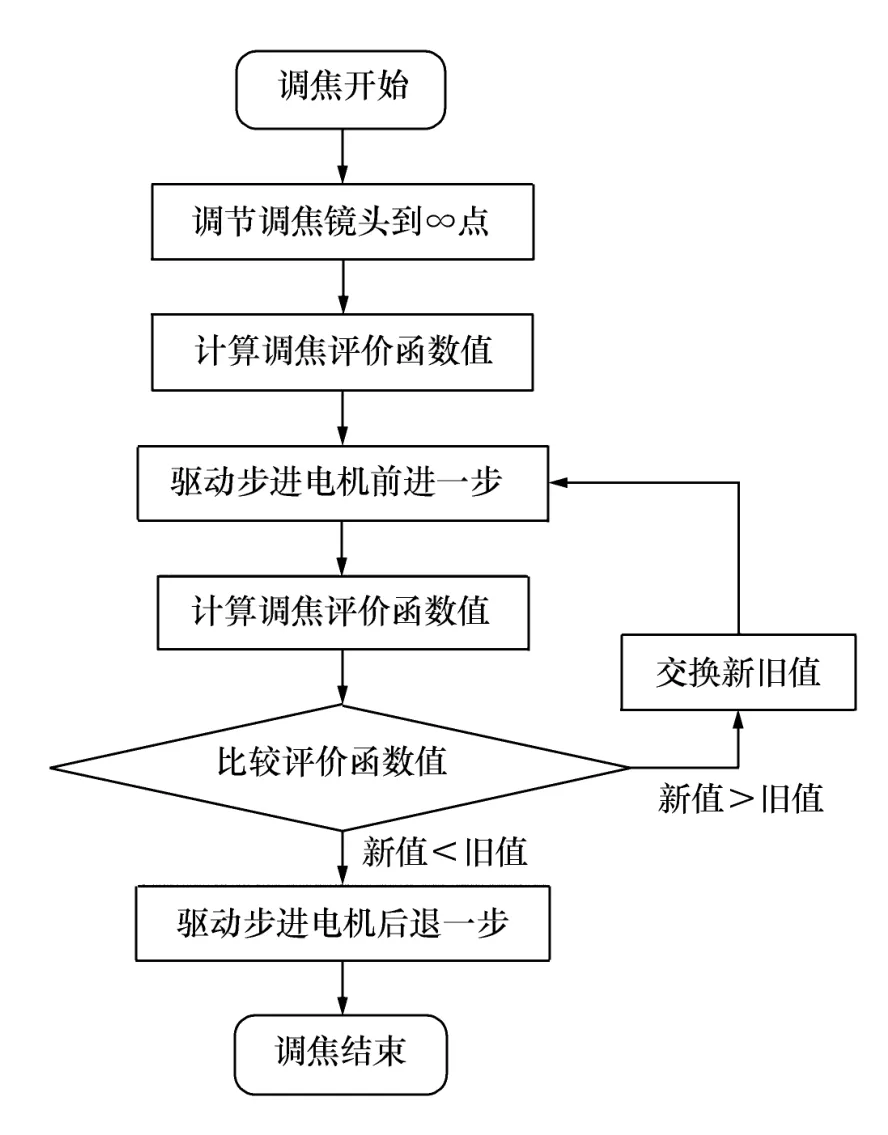
图5 自动调焦流程图Fig.5 Flow diagram of automatic focusing
图6为同一视场在处于明和暗两种环境条件下调焦的结果。结果表明,当步进电机带动镜头移动到第4个位置的时候就找到了峰值点,而且调焦评价函数具有明显的单峰性;采用带有补偿机构的光学镜头,在小范围离焦的情况下,可以快速找到调焦评价函数值的峰值点,使CCD靶面进入光学镜头的焦深之内。
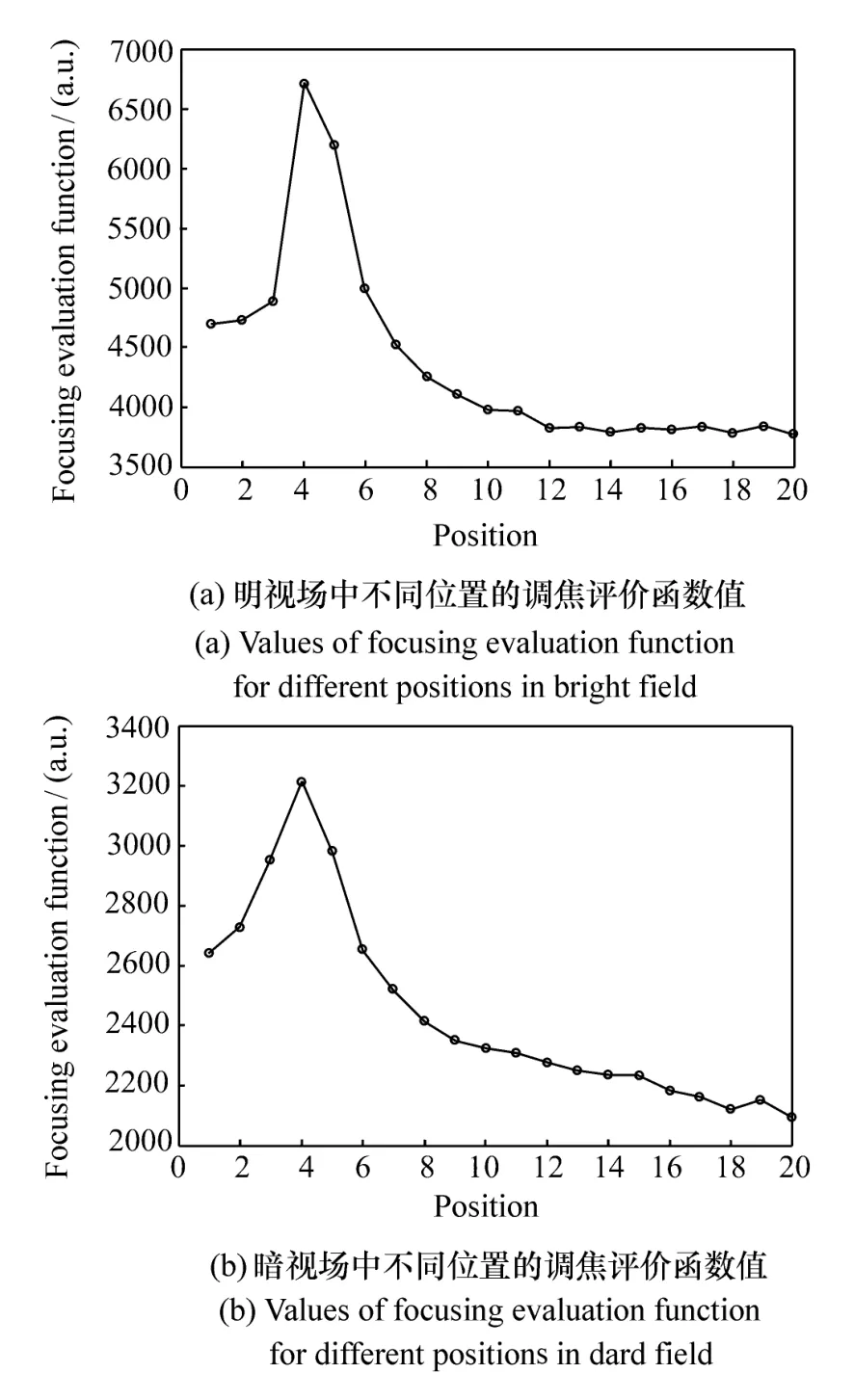
图6 明、暗视场调焦结果Fig.6 Focasing results in bright and dark field
8 结论
本文介绍了光学系统自动调焦的方法和图像法调焦的相关评价函数。介绍了以TMS320DM642数字信号处理芯片为平台的图像法自动调焦系统的实现方法。在具体的程序编写过程中,采用DSP/BIOS实时多任务系统,为实现实时调焦提供了很大的方便。文中提出了在实现调焦系统过程中需要注意的一些问题及解决方案,为实现稳定调焦提供了保证。本文所设计的自动调焦系统仅需4~5步(大约2s内)就能完成自动调焦功能,满足实际应用的需要。
[1]冈萨雷斯.数字图像处理[M].2版.北京:电子工业出版社,2008.
GONZALEZ R C.Digital Image Processing[M].2nd ed.Beijing:Publishing House of Electronics Industry,2008.(in Chinese)
[2]鲍歌堂,赵辉,陶卫.图像测量技术中几种自动调焦算法的对比分析[J].上海交通大学学报,2005,39(1):121-124.
BAO G T,ZHAO H,TAOW.Algorithm′s study on automatic focusing for imagemeasurement technology[J].J.Shanghai Jiaotong University,2005,39(1):121-124.(in Chinese)
[3]胡涛,陈世哲,刘国栋.显微视觉系统中自动调焦评价函数的选取[J].半导体光电,2006,27(2):216-220.
HU T,CHEN SH ZH,LIU G D.Selection of auto-focus function inmicro visual system[J].Semiconductor Optoelectronics,2006,27(2):216-220.(in Chinese)
[4]刘焕雨,万秋华.图像法自动调焦原理及系统实现[J].微机电信息,2008,24(5-1):39-40.
LIU H Y,WAN Q H.Elements of automatic focusing based on image processingmethod and development of system[J].Micromechanical Electronics Information,2008,24(5-1):39-40.(in Chinese)
[5]李奇,冯华君,徐之海.面向自动对焦的图像预处理技术[J].光电工程,2004,31(9):66-68.
LIQ,FENG H J,XU ZH H.Image pre-processing techniques for auto-focusing[J].Opto-Electronic Eng.,2004,31(9):66-68.(in Chinese)
[6]任四刚,李见为,谢利利.基于灰度差分法的自动调焦技术[J].光电工程,2003,30(2):53-55.
REN SG,LI JW,XIE L L.Automatic focusing technique based on gray scale difference method[J].Opto-Electronic Eng.,2003,30(2):53-55.(in Chinese)
[7]王立强,林斌,徐向东,等.基于USB Video Camera的自动对焦系统[J].光电工程,2001,28(5):32-34.
WANG L Q,LIN B,XU X D,et al..An automatic focusing system based on USB video camera[J].Opto-Electronic Eng.,2001,28(5):32-34.(in Chinese)
[8]季昱,林俊超,余本喜.DSP嵌入式应用系统开发典型实例[M].北京:中国电力出版社,2007.
JIY,LIN JCH,YU B X.Development of DSP Embedded Application System and Typical Example[M].Beijing:China E-lectric Power Press,2007.(in Chinese)
[9]王军宁,何迪,马娟,等.TIDSP/BIOS用户手册与驱动开发[M].北京:清华大学出版社,2007.
WANG JN,HE D,MA J,et al..TIDSP/BIOS User Guid and Driver Development[M].Beijing:Tsinghua University Press,2007.
[10]王智,张立平,李朝辉,等.传输型立体测绘相机的调焦机构设计[J].光学精密工程,2009,5(17):1051-1056.
WANG ZH,ZHANG L P,LIZH H,et al..Design of focusingmechanism of space tridimensionalmapping camera[J].Opt.Precision Eng.,2009,5(17):1051-1056.
[11]安源,齐迎春.空间相机直线调焦机构的设计[J].光学精密工程,2009,3(17):609-614.
AN Y,QIY CH.Design of straight-line focusingmechanism for space camera[J].Opt.Precision Eng.,2009,3(17):609-614.
Realization of auto-focusing system for video cameras based on TMS320DM 642 DSP
YAN Long-jun1,2,XIONGWen-zhuo1
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China;2.Graduate School of the Chinese Academy of Sciences,Beijing 100039,China)
Focusing systems play an important role in a variety of opticalmeasurements and detection instruments.In this paper,several kinds of auto-focusingmethodswere described and the relevant focusing evaluation functionswere introduced based on image processing methods.An auto-focusing system based on image processing was designed by using the TMS320DM642 digital signal processing chip as a platform,and its programming was implemented by a real-timemulti-tasking operating system DSP/BIOS developed by TI company.The real-timemulti-tasking operating system provides a guarantee for the realization of task scheduling and real-time focusing.Moreover,some problems and solutionswhich are needed to pay attention in the realization of auto-focusing system were demonstrated.The system designed in this paper can find the image plane in 4-5 steps(about2 s),which meets the requirements of practical applications.
digital signal processing;video camera;auto-focusing system
2010-02-12;
2010-03-16
1674-2915(2010)03-0268-06
V447.3;TH703
A
book=273,ebook=75
严龙军(1982—),男,四川内江人,硕士研究生,主要从事侦察摄像机自动调焦系统方面的研究。E-mail:xunmeng0707@126.com
熊文卓(1967—),男,吉林长春人,研究员,硕士生导师,主要从事光电位移传感器和光电仪器方面的研究。E-mail:carlx@163.com
猜你喜欢
数学物理学报(2022年1期)2022-03-16
数学物理学报(2021年6期)2021-12-21
数学物理学报(2021年5期)2021-11-19
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
空间控制技术与应用(2015年1期)2015-06-05
新闻前哨(2015年2期)2015-03-11
科技创新导报(2014年28期)2014-12-01
中国光学(2013年5期)2013-11-26
