
散热器试验台送风系统规则自提取模糊控制试验
2010-06-07 11:11陈永攀张吉礼
天津大学学报(自然科学与工程技术版) 2010年1期
陈永攀,卢 振,张吉礼,刘 辉
散热器试验台送风系统规则自提取模糊控制试验
陈永攀1,卢 振2,张吉礼2,刘 辉3
(1. 哈尔滨工业大学市政环境工程学院,哈尔滨 150090;2. 大连理工大学土木水利学院,大连 116024;3. 北京西门子西伯乐斯电子有限公司,北京 100085)
提出了环境试验室送风系统规则自提取模糊控制方法,试验研究了基于送风加热器调节的送风温度与测试室温度的模糊控制和比例积分(PI)控制效果.试验结果表明,对于无滞后环节的送风加热器-送风温度控制回路,传统PI控制方法具有较好的控制性能,收敛速度快;基本模糊控制方法收敛较慢,存在稳态误差;规则自提取模糊控制方法超调大,但收敛速度加快,稳态误差减小.对于具有滞后环节的送风加热器-测试室温度控制回路,规则自提取模糊控制方法超调小、稳态误差小、控制效果最好.可见,对于无滞后环节的被控过程,采用PI控制方法即可满足要求;而规则自提取模糊控制方法非常适用于具有大滞后环节的过程控制.
散热器试验台;送风系统;自组织模糊控制;规则自提取
低温热水散热器热工性能试验台是典型的多输入多输出、大滞后热工系统,比例积分微分(proportion integration differentiation,PID)控制对该类系统很难取得较好的控制效果,而模糊控制、特别是自组织模糊控制则是一种有效的控制方法[1].在多输入多输出模糊控制方面,Tobi和Hanafusa[2]将空调系统的温度和湿度作为输入,将加热器、表冷器及加湿器的控制阀开度作为输出,建立了多输入多输出模糊控制器.Albert等[3]利用神经网络建立了空调机组多输入多输出动态特性辨识/控制器,仿真分析了模糊控制和PID控制下空调机组动态响应特性和能耗大小.在复杂空调系统模糊控制方面,Huang和Nelson[4-5]较早地研究了由VAV空调系统、制冷系统和房间热力系统构成的复杂建筑空调系统模糊控制问题,提出了模糊规则模型建立方法,即模糊模型应以一个中心点为对称设置;仿真和试验证明了该模型建立方法的有效性.随后,他们又利用相平面分析法提出了规则模型自调整模糊控制器[6],实现了利用相平面上的参考轨迹来调整模糊控制规则,仿真和试验结果表明,该方法具有较好的控制性能.模糊控制规则是保证模糊控制具有较高控制性能的关键.Cox[7]给出了一类基于神经网络提取模糊规则的自适应模糊控制系统.1993年,Nie等[8]在模糊控制器中引入模糊竞争机构和重复学习控制算法,使得基于径向基函数网络的模糊控制器在缺少专家知识的情况下,能够自组织控制器结构,自动提取控制规则,以达到满意的控制效果.1998年,叶其革等[9]提出一种具有结构和参数学习能力的自组织模糊神经网络控制器设计方法,无需事先确定模糊控制规则,在控制过程中由神经网络在线产生模糊控制规则、调整规则参数.1999年,Wang等[10]将遗传算法(genetic algorithms,GA)的强搜索能力与Kalman滤波器收敛迅速的特点相结合,提出了一种提取规则的混合算法.2002年,Chen等[11]使用GA从训练数据中提取规则,并利用GA调整规则的前件和后件隶属函数.模糊控制规则的优化与自组织大大提高了模糊控制的性能.但为满足实时控制的要求,不仅需要良好的控制算法,而且需要满足实时控制的要求,即模糊控制规则优化与自组织算法应简捷且易于实现.为此,笔者从模糊控制规则提取的角度,提出了规则自提取模糊控制方法,在此基础上,进行了低温热水散热器热工性能试验台送风系统基本模糊控制和零初始规则的规则自提取模糊控制的试验研究,并将上述结果与比例积分(proportion integration,PI)控制进行比较,以研究各种不同控制算法在测试室系统中的适应性和控制性能.
1 规则自提取模糊控制方法
1.1控制器基本结构
图1为规则自提取模糊控制器基本结构,其中,T为采样周期,s;θ为温度设定值,℃;k表示第k次采样;y为被控过程的输出;e*、ec*和u*分别为基本模糊控制器中偏差、偏差变化和控制量的精确量; Ke、ceK和Ku分别为e*、ec*和u*的量化因子和比例因子;e′和ce′为规则自组织模块中的偏差和偏差变化的精确量;eK′、ceK′为规则自组织模块中的量化因子;Ku’为比例因子;p(kT)为当前采样时刻规则的调整量;ANN为被控过程的神经网络模型.
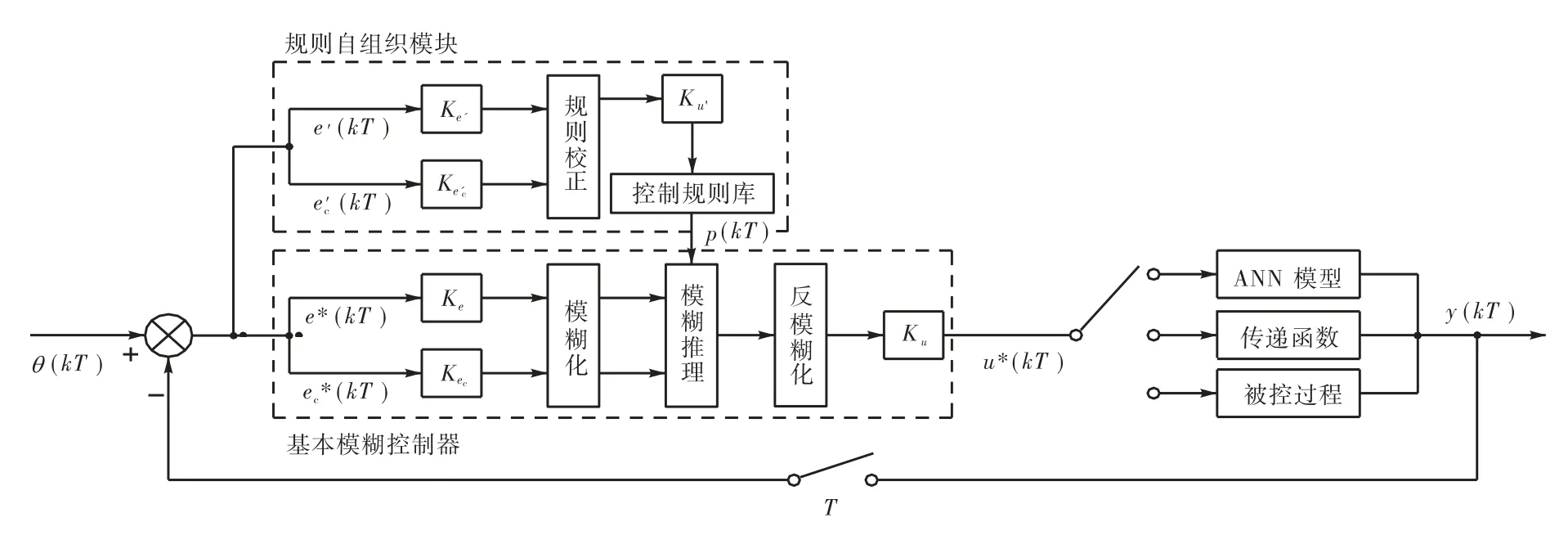
图1 规则自提取模糊控制器Fig.1 Self-abstracting fuzzy rule controller
模糊控制规则采用Mamdani型规则,即

式中:e、ec和u分别为偏差、偏差变化和控制量;Ai、Bj和Cij分别为定义在偏差变化和控制量论域上的模糊集;i=1,2,…,m,m为控制规则总数;j=1,2,…,n.
表1为初始模糊控制规则,NB(negative big)、NM(negative medium)、NS(negative small)、ZE(zero)、PS (positive small)、PM(positive medium)和PB (positive big)为模糊等级.
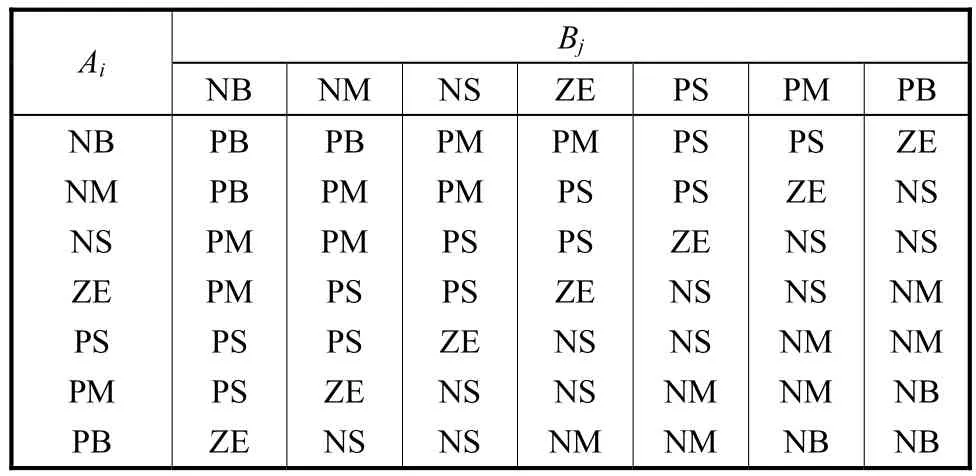
表1 模糊控制规则表Tab.1 Fuzzy control rule set
1.2实现方法
设被控对象的时滞时间为dT,即(k-d)T时刻的控制作用在kT时刻才产生响应.因此,可根据kT时刻系统响应大小,通过性能评价和校正规则表(如表2所示),实现对(k-d)T时刻的作用模糊控制规则[12]进行校正,并将校正的结果写入模糊控制规则表,以使得系统在以后的控制过程按校正后的规则工作.
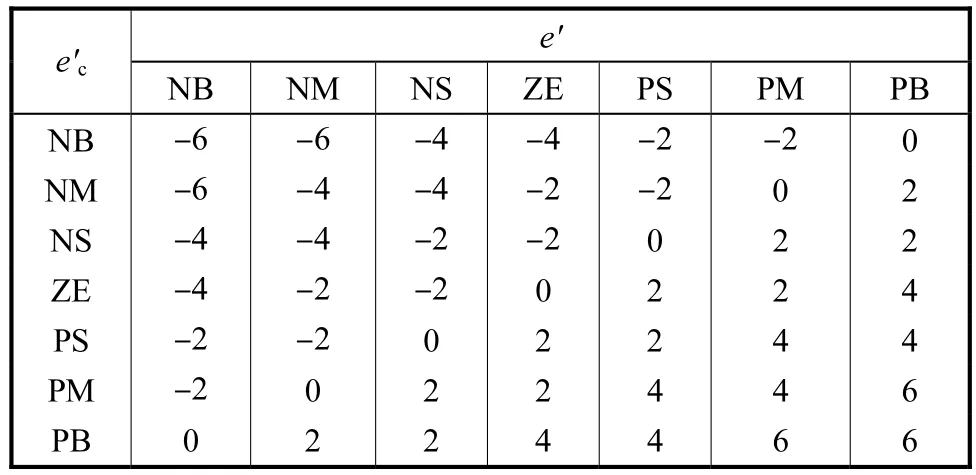
表2 规则自组织模块的校正规则Tab.2 Adjusting rule set of rule self-organizing module
(1)(k-d)T时刻作用模糊控制规则的判定.设e*((k-d)T)及ec*((k-d)T)是(k-d)T时刻的偏差和偏差变化,根据作用模糊子集推理方法[7],确定作用模糊控制规则.
(2)(k-d)T时刻作用模糊控制规则后件校正量的确定.由图1可知,根据被控过程在当前时刻的输出和参考输入,求出该时刻的偏差和偏差变化,将其送入规则自组织模块,根据表2所示的校正规则表,利用作用模糊子集推理方法,得出(k-d)T时刻作用模糊控制规则后件的调整量,记为ΔCij((k-d)T).
(3)(k-d)T时刻作用模糊控制规则后件的校正.根据表1和Cij((k-d)T)则可实现对(k-d)T时刻作用模糊控制规则后件的校正,校正后的规则称为(k+1)T时刻的作用规则,即

2 散热器试验台及其送风系统模糊控制系统结构
2.1散热器试验台简介
图2所示的低温热水散热器热工性能试验台由环境测试室、墙壁送风冷却系统、热水系统、制冷系统和测控系统构成[1].环境测试室平面图如图3所示,尺寸为3,976,mm×3,976,mm×2,800,mm,钢制围护结构,外设保温层,内设矩形风道均匀送风,送风量约11,000,m3/h,如图4所示.送风系统设有蒸发器和电加热器,通过调节电加热器控制送风温度,以维持测试室温度稳定.本低温热水散热器热工性能试验台是按照国际标准化组织的ISO3147、ISO3148、ISO3149和ISO3150等有关标准于1980年研制成功,在1983年7月由原城乡建设环境保护部科技局主持通过了鉴定,并于2002年进行现代化改造,增加了计算机测控系统,是国内最早建立的散热器静态热工试验台.试验数据精度高,复现性好,多年来一直为全国各地散热器进行鉴定和测试.

图2 低温热水散热器热工性能试验台Fig.2 Low temperature water radiator performance rig
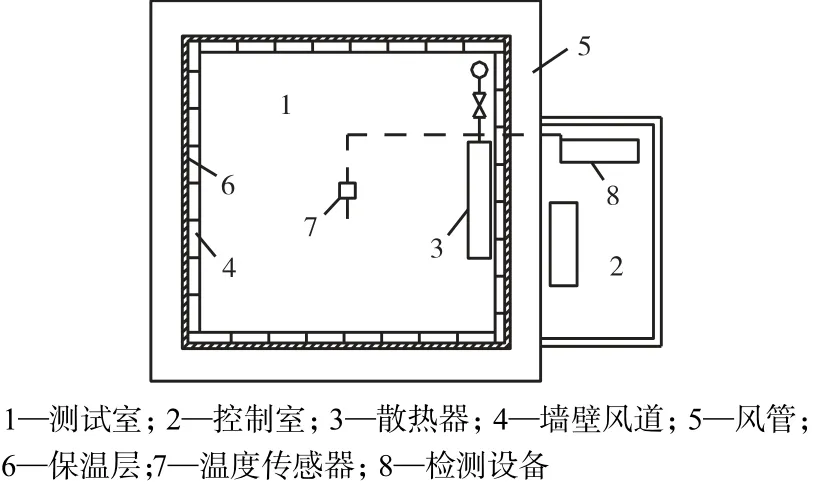
图3 测试室平面示意Fig.3 Plan sheet of testing room
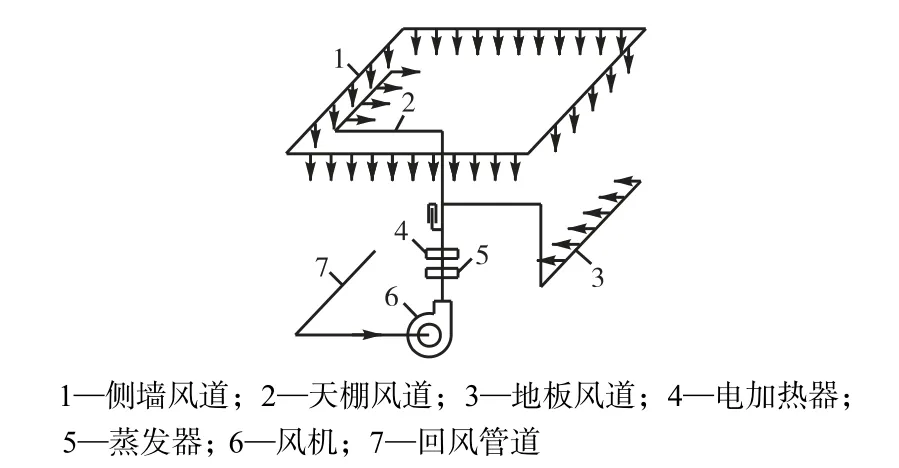
图4 风系统原理示意Fig.4 Schematic diagram of air system
2.2送风温度及测试室温度模糊控制系统结构
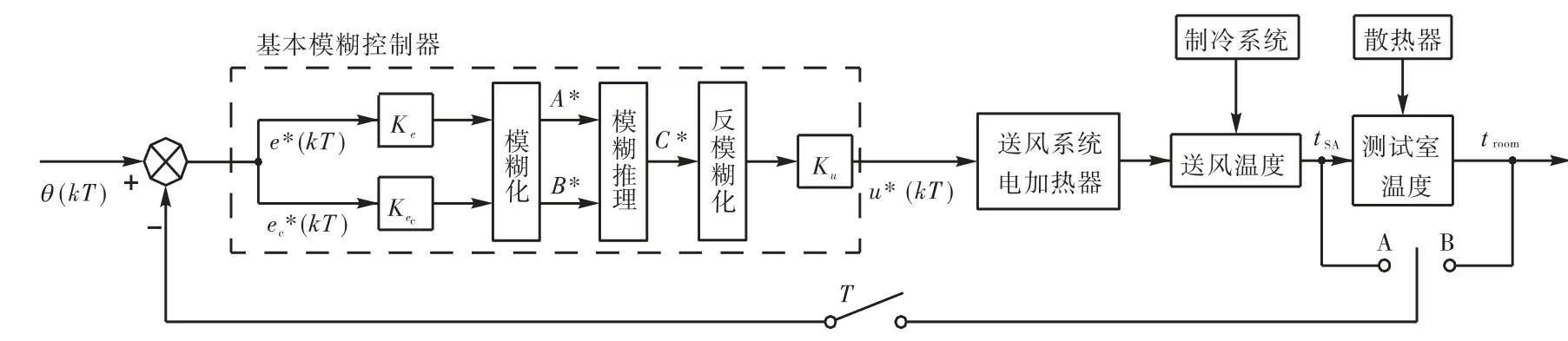
图5 送风温度及测试室温度基本模糊控制系统结构Fig.5 Structure of basic fuzzy control system for supply air temperature and testing room air temperature
图5 为送风温度及测试室温度基本模糊控制系统结构,A*、B*和C*分别为e*、ec*和u*的模糊量;tSA为送风温度,℃;troom为测试室温度,℃;控制量u的含义为某控制周期内送风系统开关型电加热器的通电时间与控制周期的百分比.反馈量开关与A连接,表示测试量为送风温度;反馈量开关与B连接,表示测试量为测试室温度.图6为送风温度及测试室温度规则自提取模糊控制系统结构.在实际试验中,初始规则有两种设置方式:一是表1规则为非零初始规则;二是初始规则后件全部为零,即零初始规则.
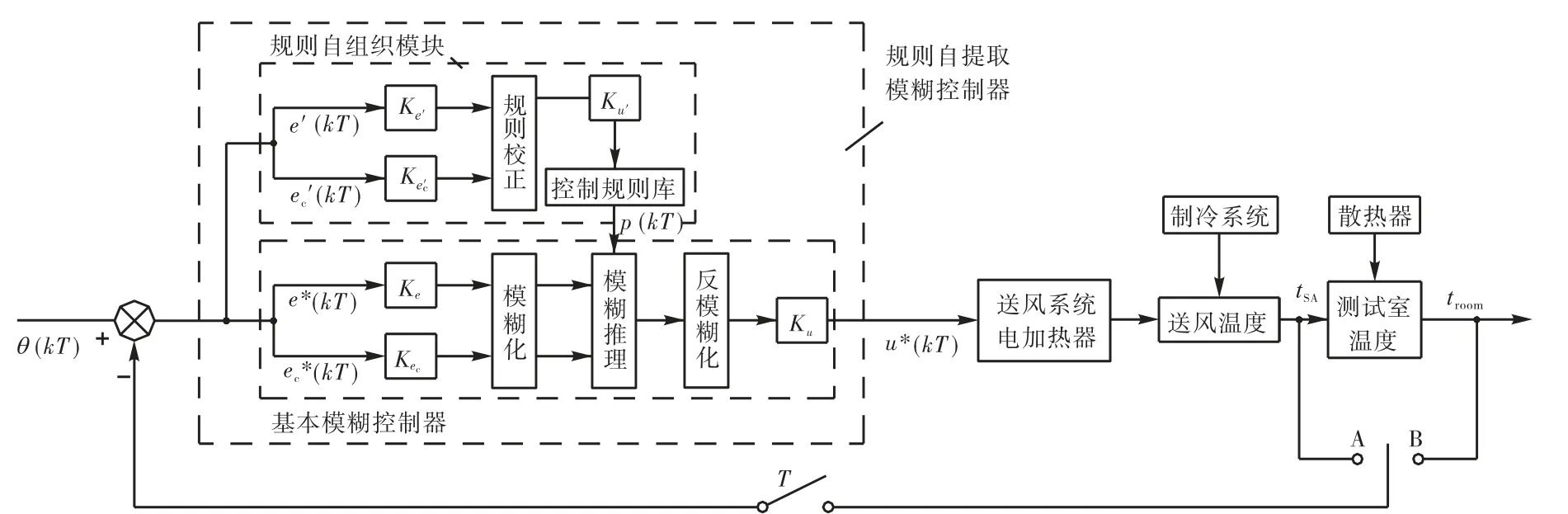
图6 送风温度及测试室温度规则自提取模糊控制系统结构Fig.6 Structure of self-abstracting rule fuzzy control system for supply air temperature and testing room air temperature
3 送风温度模糊控制试验结果分析
3.1模糊控制试验过程
(1)根据需要设定送风温度,热水系统流量设定为100,kg/h,供水温度采用PID控制,其设定值为92,℃.
(2)当送风温度tSA<13,℃时,送风系统电加热器满负荷启动加热;当tSA>15,℃时,电加热器关闭,其他情况采用模糊控制进行控制,维持送风温度在设定值附近.
(3)启动热水系统、送风系统和制冷系统.
(4)通过送风温度控制软件,设定不同的模糊控制方式.
3.2模糊控制试验结果
基于送风系统调节的测试室温度模糊控制系统结构如图5和图6所示,且反馈量开关与A连接.
(1)基本模糊控制结果.送风温度设定值为13.5℃.偏差的论域为[-1.0,1.0] ℃,偏差变化论域为[-0.2,0.2],℃,控制量论域为[15%,70%].模糊控制规则如表1所示,试验结果见图7.可见,送风温度基本模糊控制约存在10,min的过渡期,超调达到0.25,℃;进入稳定状态后仍有较大的波动,且存在0.1,℃的稳态误差.稳定时间至少持续30,min,稳定期间温度控制在13.5~13.6,℃之间,满足散热器试验台的精度要求和持续稳定时间要求.
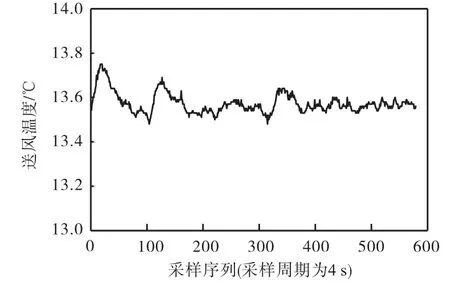
图7 送风温度基本模糊控制结果Fig.7 Testing results of basic fuzzy control of supply air temperature
(2)规则自提取模糊控制结果.考虑实际需要,送风温度设定值为14,℃,基本模糊控制器的实际偏差论域为[-1.0,1.0],℃,实际偏差变化论域为[-0.2,0.2],℃,实际控制量论域为[15%,70%].规则自组织模块的偏差论域为[-1.0,1.0],℃,实际偏差变化论域为[-0.2,0.2],℃,控制调整量论域为[-0.018%,0.018%].初始规则见表1,校正规则见表2.送风温度规则自提取模糊控制试验结果见图8,调整后的模糊控制规则如表3所示.由图8可见,以零初始规则的送风温度规则自提取模糊在总体上比基本模糊控制具有更好的控制性能,过渡期减小到约8,min;进入稳定状态后,不存在稳态误差;但其超调约0.3,℃,大于基本模糊控制的超调.由表3可见,由于采用了作用模糊子集推理方法[12],在送风温度规则自提取模糊控制过程中,仅涉及到15条模糊控制规则,其他规则在整个过程均没有起作用.稳定时间至少持续30,min,稳定期间温度控制在13.9~14.1,℃之间,满足散热器试验台的精度要求和持续稳定时间要求.

图8 送风温度规则自提取模糊控制结果Fig.8 Testing results of self-abstracting rule fuzzy control of supply air temperature
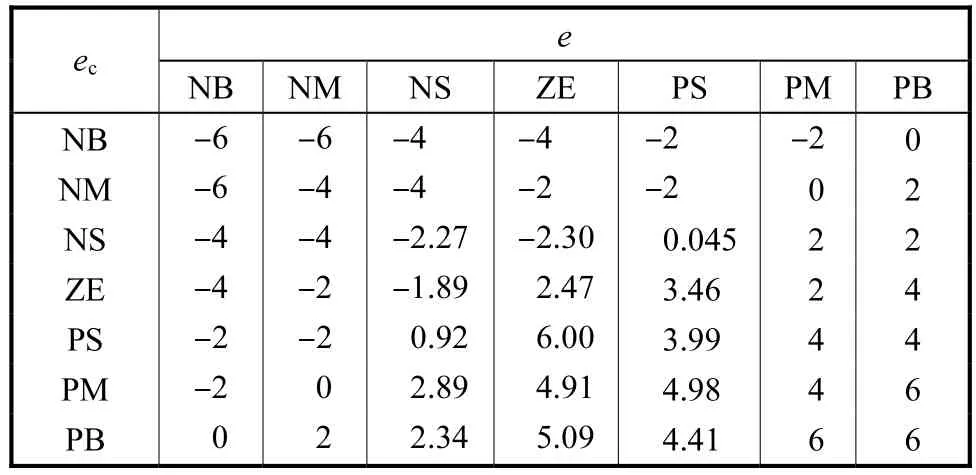
表3 送风系统规则自提取后的模糊控制规则Tab.3 Fuzzy control rule set after self-abstracting rule fuzzy control of supply air system
图9为送风温度的规则自提取模糊控制和基本模糊控制的相平面轨迹,其中,S1和S2分别为自提取模糊控制和基本模糊控制的过程起点,而E1和E2分别为自提取模糊控制和基本模糊控制的过程终点.
由图9可以看出,尽管自提取模糊控制的起点距离终点很远,但系统很快就向终点逼近并围绕终点运动;而基本模糊控制却相反,最终的运动仍然偏离终点.可见,规则自提取模糊控制比基本模糊控制具有更好的控制品质.
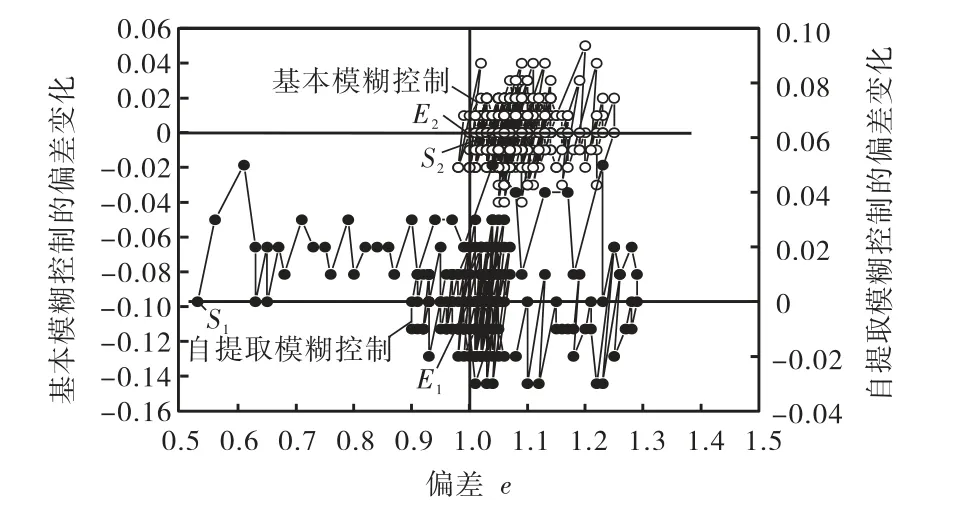
图9 送风温度模糊控制相平面轨迹Fig.9 Phase plane trajectory of fuzzy control of supply air temperature
3.3PI控制试验
本文的重点是在散热器试验台上验证规则自提取模糊控制的可靠性,而且热工系统多数为慢时变过程,不要求过高的反应速度,用PI控制即可满足要求,因此作为阶段性的工作,试验采用了积分分离PI控制算法.在以后的工作中将会加入微分的控制试验.采用的积分分离PI控制方法为
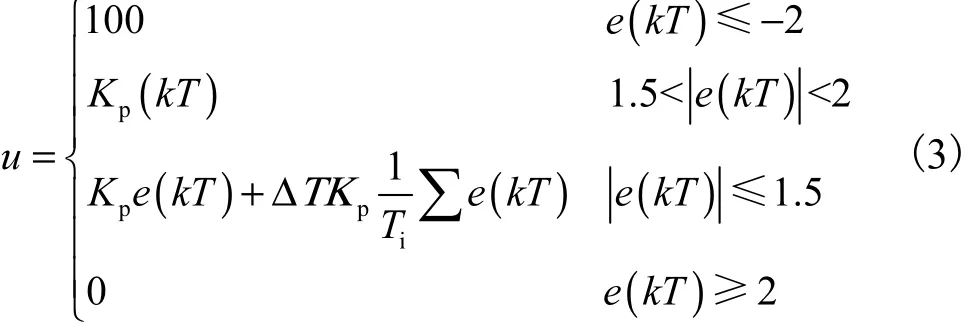
式中:Kp为PI控制的比例系数;Ti为积分系数.进行送风温度PI控制试验时,热水流量为100,kg/h,送风温度设定为14.5,℃,供水温度设定在92,℃.积分分离条件为:当tSA<13.5,℃时送风系统电加热器满负荷加热;当tSA>15.5,℃时,电加热器关闭;其他情况为PI控制.启动2台制冷机.试验时Kp=10,Ti=80.
送风温度PI控制试验结果见图10.与上述模糊控制相比,PI控制的最大问题是过渡期太长,约20,min;但超调量小,约0.21,℃;进入稳态后控制效果好.稳定时间至少持续20,min,稳定期间温度控制在14.4~14.6,℃之间,可满足散热器试验台的精度要求和持续稳定时间要求.
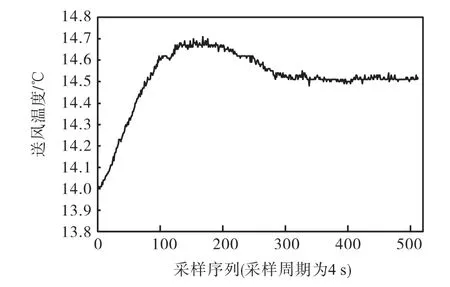
图10 送风温度PI控制结果Fig.10 Testing results of PI control of supply air temperature
4 基于送风电加热器调节的测试室温度模糊控制试验结果分析
4.1模糊控制试验过程
(1)在模糊控制试验中,热水流量为100,kg/h,供水温度为92,℃.
(2)当测试室温度troom<17.3,℃时,满负荷启动送风电加热器,当troom>18.3,℃时,关闭电加热器;其他情况采用基本模糊控制和规则自提取模糊控制维持测试室温度的稳定.当测试室温度达到16,℃后,启动送风系统和制冷系统.
(3)当室温达到16,℃时,启动循环风机,启动冷却水循环泵,启动制冷系统.
(4)通过测试室温度控制软件,设定不同的模糊控制方式.
4.2模糊控制试验结果
基于送风电加热器调节的测试室温度模糊控制系统结构如图5和图6所示,且其反馈量开关与B连接.
(1)基本模糊控制试验的测试室温度设定值为18,℃,基本模糊控制偏差论域为[-0.5,0.5],℃,偏差变化论域为[-0.2,0.2],℃,控制量论域为[15%,80%],控制规则见表1.基本模糊控制的试验结果如图11所示.可见,基于送风电加热器调节的测试室温度基本模糊试验存在着0.1,℃以上的稳态误差.稳定时间至少持续30,min,稳定期间温度控制在17.9~18.0,℃之间,满足散热器试验台的精度要求和持续稳定时间要求.
(2)规则自提取模糊控制实际偏差论域为[-0.5,0.5] ℃,实际偏差变化论域为[-0.2,0.2],℃,实际控制量论域为[15%,80%].规则自组织模块中的实际偏差论域为[-0.5,0.5],℃,实际偏差变化论域为[-0.2,0.2],℃,控制调整量论域为[-0.012%,0.012%].初始规则见表1,校正规则见表2.图12为测试室温度规则自提取模糊控制试验结果,自提取后的控制规则如表4所示.可见,基于送风电加热器调节的测试室温度规则自提取模糊控制稳定过程较长,约50,min.稳定时间至少持续25,min,稳定期间温度控制在17.7~17.8,℃之间,满足散热器试验台的精度要求和持续稳定时间要求.
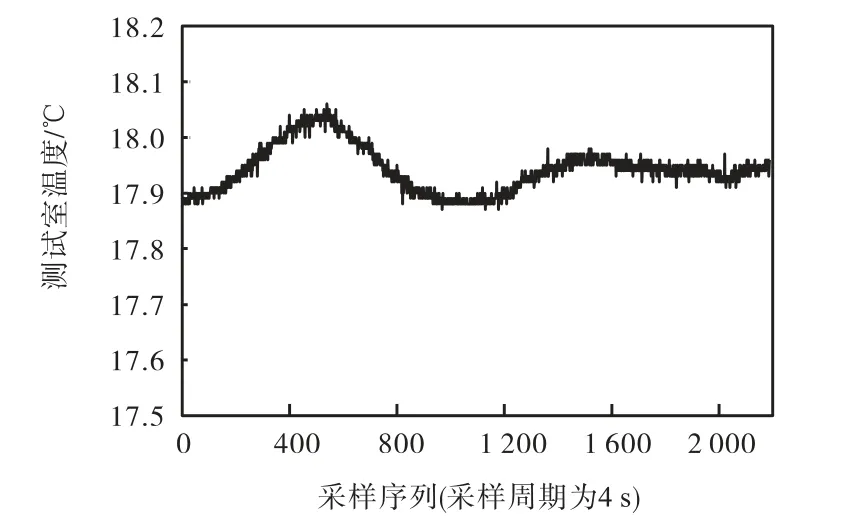
图11 测试室温度基本模糊控制试验结果Fig.11 Testing results of basic fuzzy control of testing room temperature

图12 测试室温度规则自提取模糊控制试验结果Fig.12 Testing results of self-abstracting rule fuzzy control of testing room temperature
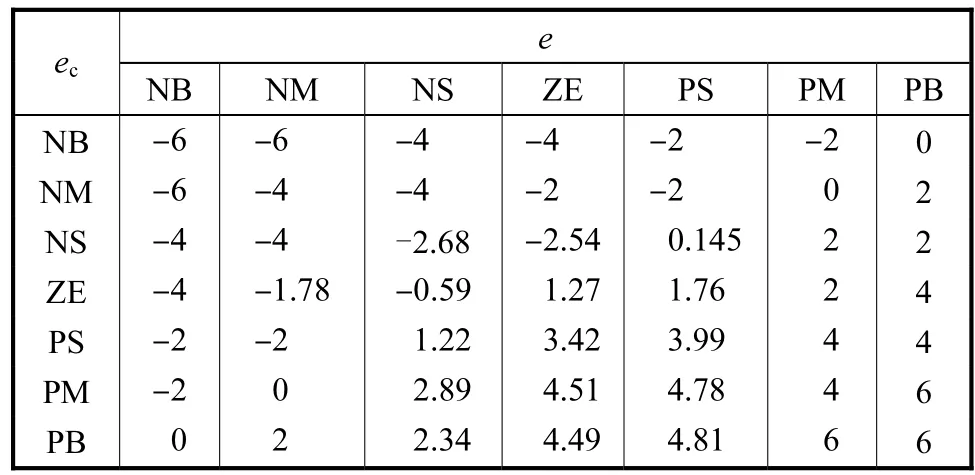
表4 规则自提取后的模糊控制规则Tab.4 Fuzzy control rule set after self-abstracting rule
4.3PI控制试验结果
采用式(3)的PI控制模型,Kp=20,Ti=3,200.测试室温度设定为17.5,℃.当troom< 17,℃时,送风系统电加热器满负荷加热;当troom> 18,℃时,电加热器关闭;其他情况为PI控制.试验中其他条件同上,则基于送风系统调节的测试室温度PI控制试验结果如图13所示.可见,基于送风电加热器调节的测试室温度PI控制试验的过渡期很长,约200,min,且有较大的超调量,约0.165,℃.稳定时间至少持续30,min,稳定期间温度控制在17.4~17.6,℃之间,满足散热器试验台的精度要求和持续稳定时间要求.试验结果表明,采用相同的PI控制模型,对送风温度的控制过渡期约20,min,对测试室温度的控制过渡期达到20,min,有10倍之差的过渡期时间证明测试室温度控制确实是大滞后控制系统.
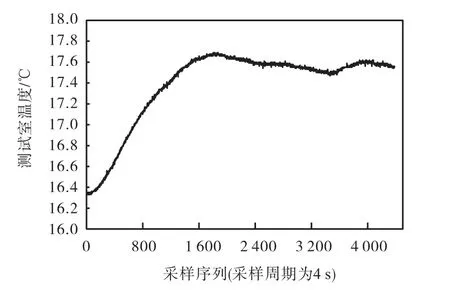
图13 测试室温度PI控制试验结果Fig.13 Testing results of PI control of testing room temperature
5 结 论
(1)对于送风温度的控制,传统PI控制方法具有较好的控制效果,系统输出虽有小幅超调,但收敛很快,其稳态误差在所试验的3种控制方法中最小;基本模糊控制系统收敛较慢,且有0.1,℃的稳态误差;规则自提取模糊控制过程出现较大超调,但是系统收敛加快,稳态误差小.
(2)基于送风电加热器调节的测试室温度控制属于典型的大滞后过程控制,尽管规则自提取模糊控制在3种控制方法中的控制效果相对最好,但也存在较长的稳定时间.
(3)基于作用模糊子集推理方法的规则自提取模糊控制方法在规则自提取过程中,涉及规则少、模糊控制算法效率高,便于实现规则在线获取和模糊控制.
[1] 张吉礼. 模糊-神经网络控制原理与工程应用 [M]. 哈尔滨:哈尔滨工业大学出版社,2004.
Zhang Jili. Principle and Engineering Application of Fuzzy Neural Network Control [M]. Harbin:Harbin Institute of Technology Press,2004(in Chinese).
[2] Tobi T,Hanafusa T. A practical application of fuzzy control for an air-conditioning system [J]. International Journal of Approximate Reasoning,1991,5(3):331-348.
[3] Albert T P,Chan W L,Chow T T,et al. A neural network based identifier/controller for modern HVAC control [J]. ASHRAE Transactions,1995,101(2):14-31.
[4] Huang S,Nelson R M. Rule development and adjustment strategies of a fuzzy logic controller for an HVAC system (PartⅠ):Analysis [J]. ASHRAE Transactions,1994,100(2):841-850.
[5] Huang S,Nelson R M. Rule development and adjustment strategies of a fuzzy logic controller for an HVAC system (PartⅡ):Experiment [J]. ASHRAE Transactions,1994,100(2):851-856.
[6] Huang S,Nelson R M. Development of a self-tuning fuzzy logic controller [J]. ASHRAE Transactions,1999,105(1):206-213.
[7] Cox E. Adaptive fuzzy system [J]. IEEE Spectrum,1993,30(2):27-31.
[8] Nie J,Linkens D A. Learning control using fuzzified selforganizing radial basis function network [J]. IEEE Trans on Fuzzy Systems,1993,1(4):280-287.
[9] 叶其革,吴 捷. 一种自组织模糊神经网络控制器[J]. 控制与决策,1998,13(6):694-698.
Ye Qige,Wu Jie. Self-organizing fuzzy neural networks controller [J]. Control and Decision, 1998,13(6):694-698(in Chinese).
[10] Wang Liang,Yen J. Extracting fuzzy rules for system modeling using a hybrid of genetic algorithms and Kalman filter [J]. Fuzzy Sets and Systems,1999,101(3):353-362.
[11] Chen S M,Chen Y C. Automatically constructing membership functions and generating fuzzy rules using genetic algorithms [J]. Cybernetics and Systems,2002,33(8):841-862.
[12] 欧进萍,张吉礼. 作用模糊子集推理方法的研究与应用[J]. 模糊系统与数学,2000,14(3):58-65.
Ou Jinping,Zhang Jili. Study and application on the method of functioning-fuzzy-subset inference [J]. Fuzzy Systems and Mathematics,2000,14(3):58-65(in Chinese).
Self-Abstracting Rule Fuzzy Control Experiment of Supply Air System in a Radiator Performance Rig
CHEN Yong-pan1,LU Zhen2,ZHANG Ji-li2,LIU Hui3
(1. School of Municipal and Environmental Engineering,Harbin Institute of Technology,Harbin 150090,China;2. School of Civil and Hydraulic Engineering,Dalian University of Technology,Dalian 116024,China;3. Beijing Siemens Cerberus Electronics Company Limited,Beijing 100085,China)
A self-abstracting rule fuzzy control(SARFC)method for supply air system in a radiator performance righas been put forward and fuzzy control experiments and proportion integration(PI)control experiments for the controlled loops of both supply air temperature and testing room air temperature have been carried out based on adjustment by the electrical heater set in the supply air system. Two types of fuzzy control have been experimented,i.e. basic fuzzy control and SARFC with zero initial control rules. Experiment resultsindicate that for the control loop of supply air electrical heater and supply air temperature without time delay,PI control has a better control performance and a higherconstringency speed than the fuzzy control,basic fuzzy control has a lower constringency speed and a stable error,and SARFC has a higher overshoot,higher constringency speed and smaller stable error. For the control loop of supply air electrical heater and testing roomair temperature with time delay,SARFC has a satisfactory control performance with a lower overshoot and smaller stable error than the basic fuzzy control and PI control. According to the experiments,SARFC is particularly suitable for the control process with a large time delay while PI is a good candidate for the control process without time delay.
radiator performance rig;supply air system;self-organizing fuzzy control;self-abstracting rule
TP273
A
0493-2137(2010)01-0043-07
2008-12-16;
2009-04-13.
“十一五”国家科技支撑计划资助项目(2006BAJ01A09;2008BAJ12B05);国家自然科学基金资助项目(50578049).
陈永攀(1980— ),男,博士研究生.
陈永攀,cyp257@126.com.
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
石油沥青(2021年3期)2021-08-05
成都信息工程大学学报(2021年6期)2021-02-12
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年2期)2020-12-14
节能技术(2018年6期)2019-01-03
制造技术与机床(2018年12期)2018-12-23
汽车电器(2018年1期)2018-06-05
人民音乐(2016年3期)2016-11-07
广东石油化工学院学报(2016年3期)2016-05-17
