基于AT89C51的倒车雷达设计与开发
2010-06-13 08:04高中义
科技传播 2010年21期
高中义
长春职业技术学院汽车学院,吉林长春 130033
基于AT89C51的倒车雷达设计与开发
高中义
长春职业技术学院汽车学院,吉林长春 130033
随着汽车普及率的逐年增加,消费者在将汽车作为交通运输工具的同时,对于汽车的安全性有了更高的要求。在驾驶员最为常见的驾驶行为中,倒车引发的交通事故不在少数,由此引发的重大事故也时有发生,给交通安全埋下了重大隐患。为解决这一安全问题,倒车雷达应运而生,越来越多的商家也进入了这个市场。倒车雷达的全称是“倒车防撞雷达”,也称“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的视频显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。倒车雷达的主要作用是在倒车时,驾驶员无须回头便可知道车后有无障碍物,使停车和倒车更容易、更安全。目前,在国内只有部分高档车配有倒车雷达,更多的车型在这方面还是空缺。本课题就是针对市场上中低档车型设计的一种低成本、高灵活性、高可靠性、易于控制、性能优良的倒车雷达。
嵌入式系统;汽车倒车雷达;超声波
1 课题的研究背景及意义
随着汽车普及率的逐年增加,消费者在将汽车作为交通运输工具的同时,对于汽车的安全性有了更高的要求。在驾驶员最为常见的驾驶行为中,倒车引发的交通事故不在少数,由此引发的重大事故也时有发生,给交通安全埋下了重大隐患。为解决这一安全问题,倒车雷达应运而生,越来越多的商家也进入了这个市场。倒车雷达的全称是“倒车防撞雷达”,也称“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的视频显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。倒车雷达的主要作用是在倒车时,驾驶员无须回头便可知道车后有无障碍物,使停车和倒车更容易、更安全。目前,在国内只有部分高档车配有倒车雷达,更多的车型在这方面还是空缺。本课题就是针对市场上中低档车型设计的一种低成本、高灵活性、高可靠性、易于控制、性能优良的倒车雷达。
2 设计原理
在本课题中嵌入式系统是倒车雷达的技术核心。嵌入式系统的基础是计算机技术,其目的是用于实际生产、生活的应用,通过对其系统的软件、硬件来进行配置,来制造出有严格要求功耗、成本、体积、功能可靠的专有系统。它可以实现对其他设备的控制、监视、管理等功能。嵌入式系统包括硬件和软件两大部分。硬件部分包括处理器、微处理器、存储器及外设器件和图形控制器等,它是整个系统的物理基础;软件部分则包括操作系统软件和应用程序编程,可以为实际系统的运行提供控制方法。通过嵌入式系统的不断发展和其产业化进程的不断加深,现已广泛地应用于日常信息通信、企业工业、国家军事、日常生活办公等多个领域。
超声波定位技术是倒车雷达设计的基础。超声波的波长比一般声波要短,并且易于定向发射,具有较好的方向性,强度好控制。由于超声波的速度相对于光速来说要小的多,其传播时间比较容易检测,已被广泛用于超声测距,测速,清洗,焊接等方面。超声波作定位技术就是由超声波发射装置发射不被人们听到的超声波,借助空气媒介传播,由障碍物反射回来的时间间隔长短与被发射的超声波的强弱判断障碍物性质或障碍位置的方法。
3 设计与开发
结合嵌入式系统的特点和超声波测距原理,从设计任务的复杂程度、开发人员的熟悉度、开发成本等多方面权衡,本设计选择AT89C51单片机作为主控器。超声波探测器件可以发射超声波并接收回波,再用单片机记录从超声波发射时刻起到接收到超声波返回信号之间的间隔时间,再根据声波在空气中的传播速度,即可计算出产生回波的物体与超声探测元件之间的距离。

系统总体架构框图
因此,用单片机某一端口输出一定周期的方波,经超声波发射探头产生的机械谐振发射超声波,与此同时启动定时器工作。当超声回波接收探头接收到回波信号后,经放大整形送至比较器,比较器的输出将变为高电平,此信号就作为单片机中断请求信号,单片机一旦接收到中断请求信号立即读取定时器记录的时间,再将计算得到的距离数据送数码管显示(LED数字显示通过动态扫描法来实现),同时触发语音模块电路,不断重复发射、接收、显示与语音提示这一循环过程,直至汽车退出倒车运行控制状态。
倒车雷达硬件电路的设计主要包括单片机系统及显示电路、超声波发射电路和超声波检测接收电路、倒车控制信号电路、语音电路组成。

倒车雷达硬件设计图
倒车雷达的软件设计主要有主程序、发送子程序、接收子程序、报警程序、LED显示程序组成。程序的设计思路为:完成定时器、中断系统及各种初始化参数的设定,发出40KHz的方波信号,等待接收中断、调用距离计算子程序、显示测试距离、发出语音同步提示控制信号。
一般来说,设计制作的任务不可能一次性做好,总是需要调试的。通过采用KEIL软件和Proteus进行联调仿真,仿真成功后,再进行实际实验,这样可以加快开发的进度,又可以节省硬件资源。硬件、软件联合仿真调试完成后,将编译好的程序下载到单片机进行试运行。并根据运行及在调试中出现的问题进行反复修改,对测量过程中产生的误差和重复一致性进行多次实验分析,通过不断的优化使系统达到能够进行实际使用的测量要求。
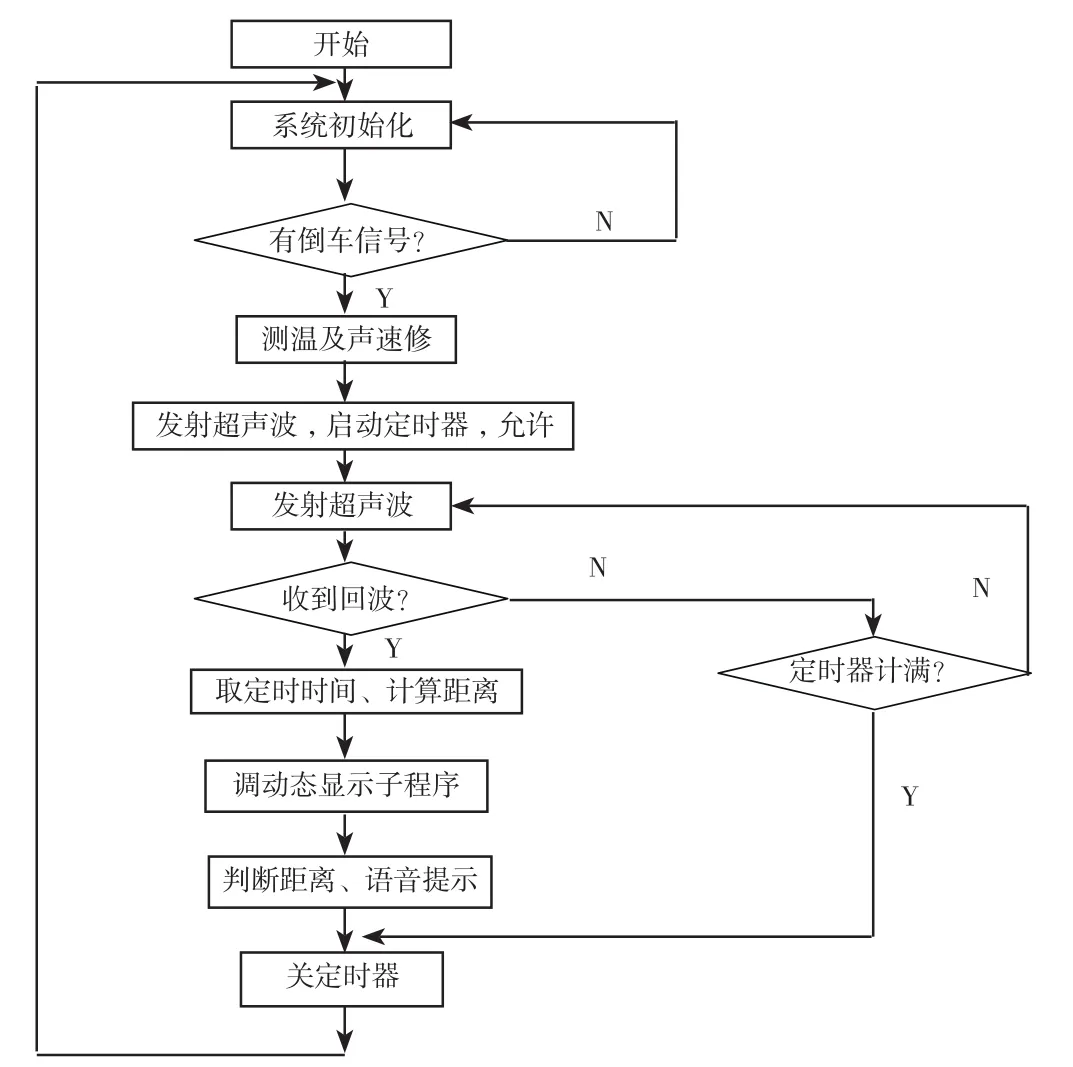
程序主流程图
4 结论
本课题所设计的倒车雷达,能够满足一般性近距离测距的要求,系统构造成本较低,性价比高,是进行交通管理的有效手段和工具,可提高车辆距离检测的准确性,有利于交通运输的科学管理,降低对驾驶人员本身的素质要求。本设计有望成为驾驶员特别是货车以及公共汽车驾驶员的好帮手,可有效的减少和避免那些视野不良的大型汽车的如冷藏车、集装箱车、垃圾车、食品车、载货车、公共汽车等倒车交通事故,另外还特别适用于夜间辅助倒车、倒车入库以及进入停车场停车到位,在日常驾驶过程中起到了良好的辅助作用。
U46
A
1674-6708(2010)30-0253-02
猜你喜欢
汽车实用技术(2023年10期)2023-06-14
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
军民两用技术与产品(2020年3期)2020-04-07
铁道通信信号(2018年2期)2018-04-18
电镀与环保(2016年3期)2017-01-20
公民与法治(2016年4期)2016-05-17
单片机与嵌入式系统应用(2014年9期)2014-03-11