微小位移测量装置设计*
2010-11-14 13:45唐小林
大地测量与地球动力学 2010年1期
唐小林 荣 卓
(中国地震局地震研究所,武汉 430071)
微小位移测量装置设计*
唐小林 荣 卓
(中国地震局地震研究所,武汉 430071)
微小位移测量装置的设计是以 51单片机为控制核心,采用 DDS芯片产生稳定的 100 kHz的正弦波信号,使用差分输出来驱动差动变压器输入极,通过检测变压器两个次级线圈的电压,并对两电压进行计算处理,从而得出位移量。经过巧妙的选取直流电机和电机驱动电路,很好地完成了磁棒的精确闭环控制,控制精度能够达到0.5 mm。
线性差动变压器;闭环控制;检波电路;位移量;测量装置
1 引言
微小位移测量系统广泛应用于地质、化工、石油、制药、制盐等行业。本文讨论基于线性可变差动变压器(LVDT)微小位移测量系统的设计。系统由一个铁芯和两个线圈组成,通过一次线圈与二次线圈弱电磁耦合,使得铁芯的位移变化量与输出电压变化量呈精密线性关系[1]。电压信号通过差动放大、取均方根值、数据采集等过程,即由模拟量转换成便于单片机系统处理的数字量,而后通过单片机的数据处理,可准确地计算出铁芯的位移量。
2 方案设计
2.1 激励信号源电路的设计
正弦激励信号源是差动式位移传感器的驱动源,激励源高度稳定才能保证后级输出稳定可靠,具有高度的频率和幅度稳定性的正弦激励信号是差动变压器位移测量装置获得较高精度的前提,因此正弦信号发生电路的选取对本测量装置而言至关重要。
AD9851[2]是AD公司生产的一款DDS芯片,它的最高时钟为 180 MHz并且采用了先进的 CMOS技术。具有相对带宽宽,频率转换时间极短、频率分辨率高、功耗低等优点,并且AD9851的外围器件很少,输出相位连续,频率、相位和幅度均可实现程控。其输出频率的稳定度基本可以达到晶振的精度。而且还可以设置不同频率的正弦信号,方便调试分析。故选择DDS芯片AD9851来产生100K的正弦波。
2.2 测量检波电路设计
AD637[3]有效值检测器将输出的交流信号取样回来转换为有效值。AD637可测量的信号达 7V,精度优于 0.5%,且外围元件少,频带宽,对于一个有效值为 1V的信号,它的 3dB带宽为 8 MHz,并且可以对输入信号的电平以 dB形式表示,所以可以满足要求,因此采用此方案。
2.3 数据处理部分
通过ADC芯片对直流信号进行采样送单片机,由单片机处理数据。此方案电路简易,编程方便,故采用此方案。为了能使处理后的数据作为闭环控制信号,我们还采用DAC把处理后的数据转换为模拟量输出,以供电路调试分析和最终系统测试。
3 系统设计
本系统采用DDS芯片AD9851产生 100K的正弦波,此信号通过由 THS4503[4]构成的全差分电路来驱动变压器的初级线圈。随着磁棒在线圈内的轴向移动可以使两对称次级线圈产生不平衡输出,再把两路输出分别送入用 AD637和 OPA132构成的检波放大电路,然后用 ADS7886[5]对放大过的直流信号进行采样并送单片机,单片机通过运算得出位移量,同时把数据送入液晶进行显示。而且系统还能够通过对所测得的位移量与设置值进行比较,通过对直流电机的正反转控制,实现电机带动磁棒到达指定位置。系统结构框图如图 1所示。

图1 系统结构框图Fig.1 Block diagram of the system
4 局部电路设计与电路参数计算
4.1 线性差动变压器的制作
磁棒的移动范围是 -20~+20 mm,所以磁棒的长度不能小于 40 mm,而且磁棒轴向移动时不能影响初级线圈的电感,所以在磁棒移动时是不能离开初级线圈的,磁棒的长度还应该加上初级线圈的长度,考虑到手工制作的问题,如果初级线圈太短,不对称性问题较明显,因此最后取磁棒的长度为 8 cm。其次,应确定初级线圈的电感,差动放大器的输出电阻与初级线圈形成的电感构成一个衰减器,由于磁棒的移动会影响初级线圈的电感,为了减小这种衰减带来的误差,所以初级线圈的感抗应比差动输出的电阻大得多。由于频率为 100 K,如果取感抗为 1 000欧姆,那么电感为 1.6 mH,线圈电感值通过电感测量仪来确定。次级线圈的长度,由于磁棒的上下移动范围各有 2 cm,为了不让磁棒移出线圈,所以两次级线圈的长度均不能小于 6 cm,这里把次级线圈的总长度确定为 13 cm。采用直径0.2 mm的漆包线绕制线圈。
4.2 DDS频率控制字的计算
DDS选用AD9851,由 DDS产生的信号频率计算表达式如式 1所示:

其中 clock为系统频率,这里取 120 MHz,所以要输出 100 K的信号,根据计算可知,给 DDS的频率控制字为 369d03H。
4.3 差动放大器的设计
差动放大电路采用 TI公司的全差分结构的超高速宽放差动放大器 THS4503设计差动放大器,该芯片能够方便调节放大倍数,使用简单,调试容易,而且性能优良。其外围电路如图 2所示。
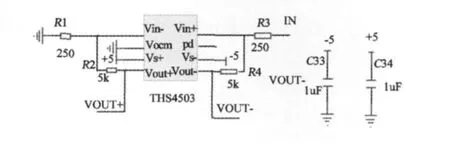
图2 差动放大器电路Fig.2 Circuit of differential amplifier
那么有:


DDS输出信号的峰值只有 500 mV,所以信号需要放大 10倍,为了使差分输出平衡,根据式 (2)、(3)、(4),使 VOCM接地,R1和 R3取 250Ω,R2和 R4取5 K。
4.4 检波电路的设计
AD637是一片测量信号有效值的芯片,使用简单稳定,电路如图 3所示。根据芯片资料可知,C2为滤波电容,C2的值越大,那么它抑制谐波的能力就越强,但是它所需要的运算时间就会越大,C2的取值与输入信号的频率有关,输入信号频率为 100 K,C2取 1 uF为比较合适。
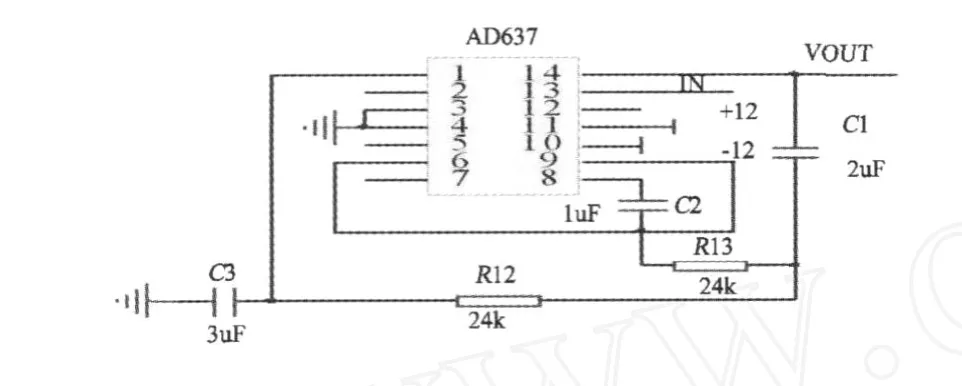
图3 检波电路Fig.3 Detecting circuit

图4 电机驱动电路Fig.4 Motor driving circuit
4.5 电机驱动电路的设计
由于要实现对直流电机的精确控制具有一定难度,即使采用闭环控制算法,也很难兼顾控制电机的速度和精度,因此本设计采用单放机内部的直流电机给磁棒的传动提供动力,完全利用单放机内部的齿轮结构,不仅调试和安装容易,而且由于其驱动电流一般只有 40 mA。其电路如图 4所示,单片机的两个 I/O口,给不同电平同时作用到 OP07的两个输入端,达到控制OP07的输出电平的极性,通过互补三极管能够将驱动电流提高到 200 mA,足够驱动小型直流电机。并且通过前端的分压和反馈电阻R4可以很容易调节输出电压的大小,从而控制电机的正反转,同时还可以通过改变脉冲数目和宽度来达到精确微小位移控制。
4.6 软件的设计
本位移测量装置的软件设计主要包括 AD9851配置、液晶显示和菜单切换、数据采集与处理、电机控制等程序。系统软件流程如图 5所示。
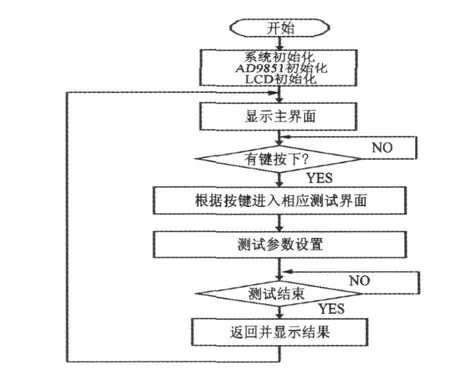
图5 软件流程图Fig.5 Flow chart of the software
5 测试结果与分析
使用数显游标卡尺比对,磁棒在线圈中移动时,用示波器观察记录A、B两点电压波形的峰值如图 6所示,同时记录A,B电压的有效值与位移测量系统显示的 d值。
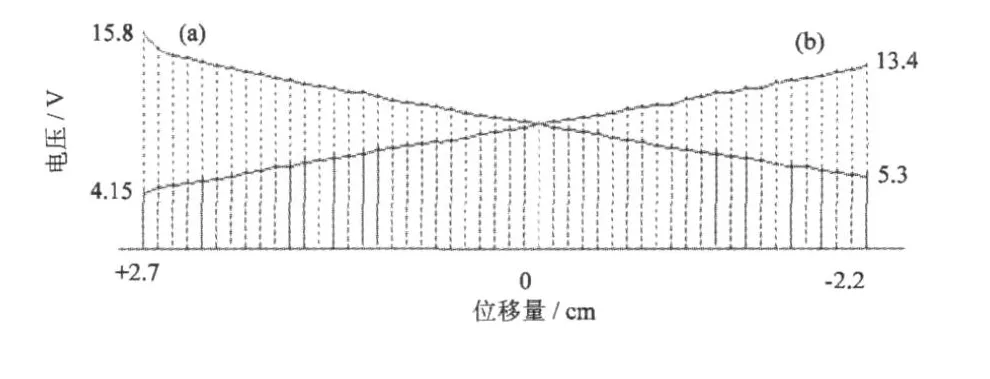
图6 测试结果Fig.6 Test results
从数据结果可以看出该位移测量系统在中心位置的 47 mm范围内都具有良好的线性特性,测量精度足够满足 0.5 mm的要求。同时通过多次测量,该测量系统具有较好的重复性。
1 胡学武,盛小明.LVDT无相移解调器及监控器的电路设计[J].苏州大学学报,2008,28(2):73-74.
2 CMOS 180 MHz DDS/DAC Synthesizer AD9851[EB/OL]. http://www.analog.com/static/imported-files/data_sheets/ AD9851.pdf
3 High Precision,W ideband RMS-to-DC converter AD637 [EB/OL]. http://www.analog.com/static/importedfiles/data_sheets/AD637.pdf
4 W ideband,low-distortion fully differential amplifiers[EB/ OL].http://focus.ti.com/lit/ds/symlink/ths4503.pdf
5 12-Bits,1-MSPS,micro-power,miniaturesar analog-to-digital converters[EB/OL].http://focus.ti.com/lit/ds/symlink/ ads7886.pdf/
DESIGN OF M INI-D ISPLACEM ENT M ETERING EQUIPM ENT
Tang Xiaolin and Rong Zhuo
(Institute of Seism ology,CEA,W uhan 430071)
The equipment reported here takes 51 monolithic integrated circuits as control core,and uses the DDS chip to produce the 100 kHz sine wave signal.It uses the difference output to drive the input levelof differentialmotion transformer,through testing the voltagesof the transfor mers two sencondary coils and carrieson computation processing of the t wo voltages,thus the displacement value is obtained.After the ingenious selection of direct currentmachine and motor-driven electric circuit,magnetic rod’s precise closed-loop control is completed very well.The control precision can reach to 0.5 mm.
linear differential motion transfor mer;closed-loop control;detecting circuit;displacement;measuring equipment
1671-5942(2010)Supp.(Ⅰ)-0176-03
2010-06-11
唐小林,男,1953年生,高级工程师,主要从事仪器研发工作.E-mail:ttang531203@sina.com
TH76.3
A
猜你喜欢
大电机技术(2022年4期)2022-08-30
装备制造技术(2020年12期)2020-05-22
模具制造(2019年7期)2019-09-25
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
电子制作(2017年10期)2017-04-18
电子制作(2017年23期)2017-02-02
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年24期)2015-04-09
汽车维护与修理(2015年6期)2015-02-28