
双点后方交会在矿区测量中的应用
2010-12-31 13:39银光胜
中国锰业 2010年4期
银光胜
(广西锡山矿业有限公司,广西南宁 530022)
0 前言
在山区或者矿山进行测量,经常会遇到控制点少,点又都在高山上,登山困难,无法进行测量引点的情况,给测量工作者带来困难。本文解决只有2个控制点(并且两个控制点人员都不能到达,点觇标可见)的测量引点方法——双点后方交会法。
《测量学》课本[1]上“双点后方交会法”没有直接的求解公式,由于公式复杂,计算困难,不利于野外作业,在实际应用中很少用到;文章对求解公式作了进一步的推演;结合 CASIOfx-4800p(或fx-4500p)计算器的特点,编制了程序计算法,解决了野外作业计算复杂的问题;使“双点后方交会法”在实际应用方便可行。
1 双点后方交会坐标求解公式推导
双点后方交会法,是一种直接在两个未知点上设置测站测设未知点坐标的交会法。它不同于前方交会法,也区别于3点后方交会法。双点后方交会的布设有两种形式,见图1。
图1中P1、P2为未知点,A、B为已知点,观测角为∠a1、∠b1、∠a2、∠b2;双点后方交会法的解算难点在于解算辅助角。解算辅助角设为 ∠r1、∠δ1、∠r2、∠δ2;为了使导出的公式适用于各种图形,对各角的符号注记作如下规定:P1点上的两个观测角以∠a1、∠b1表示;P2点上的两个观测角以∠a2、∠b2表示;各角注记一律顺时针向,∠a1=∠P2P1A;∠b1=∠BP1P2;∠a2= ∠AP2P1;∠b2=∠P1P2B;解 算 辅 助 角 ∠r1=∠P1AB、∠δ1=∠ABP1、∠r2=∠BAP2、∠δ2= ∠P2BA。
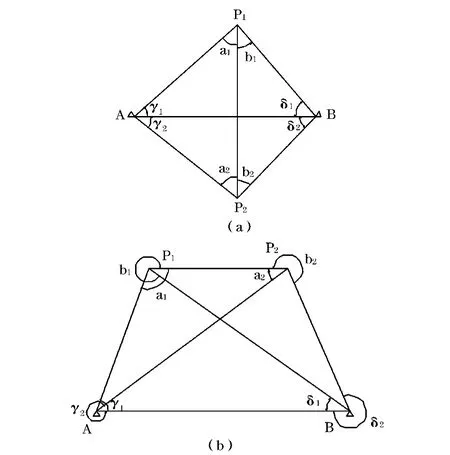
图1 双点后方交会示意
求解过程分为两步:
1) 求算辅助角 r1、δ1、r2、δ2
由图1(a)可见:
r1+δ1=180°-(a1+b1)

由正弦定理按两条路线求边 SP1P2为:
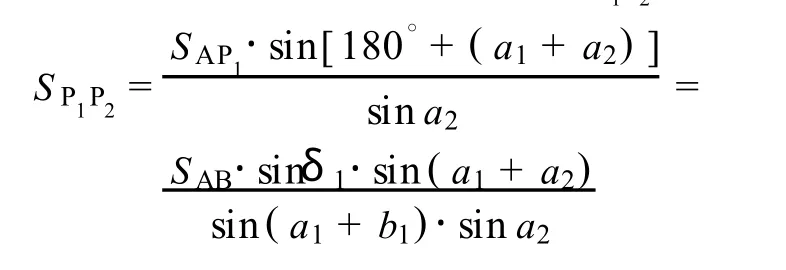
按配分比例,得:
即
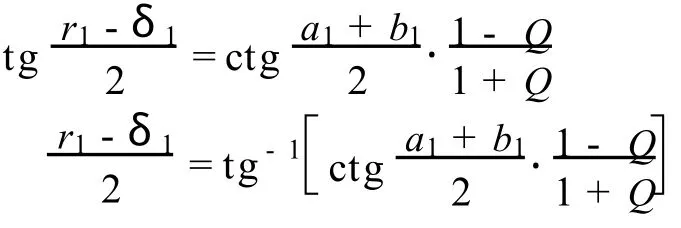
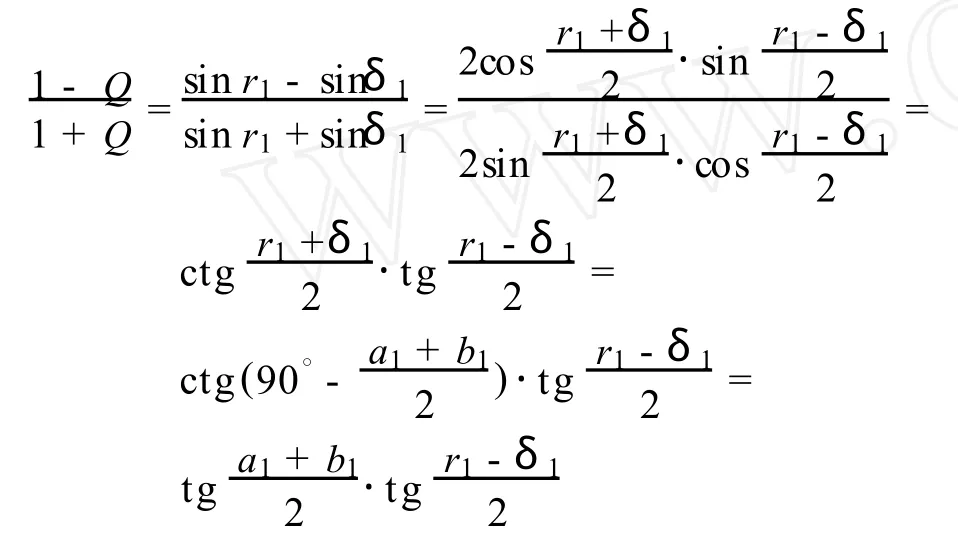
(1)、(2)两式联立求解得:
r1=M+90°-(a1+b1)/2
δ1=90°-(a1+b1)/2-M
根据三角形可解得:
r2=180°-r1-a1-a2
δ2=180°-δ1-b1-b2
若 r2、δ2为负,亦即相当于图1(b)外角情况。
2)求算未知点P1、P2的坐标[2]
把已知A、B点坐标和解算出的辅助角r、δ代入前方交会公式,即得P1点坐标:
XP1=(xa·ctgδ1+xb·ctgr1-ya+yb)/(ctgr1+ctgδ1)
YP1=(ya·ctgδ1+yb·ctgr1+xa-xb)/(ctgr1+ctgδ1)
求P2点坐标时,注意前方交会公式的逆向性,A、B点互换,辅助角r、δ也互换,可得 P2点坐标:XP2=(xb·ctgr2+xa·ctgδ2-yb+ya)/(ctgr2+ctgδ2)YP2=(yb·ctgr2+ya·ctgδ2+xb-xa)/(ctgr2+ctgδ2)
2 程序编制
从以上公式推导可以看出:双点后方交会测量法,施测容易;但是计算公式多,计算复杂,不适宜野外作业、计算[3]。因此,在推导的基础上,结合CASIO fx—4800p的程序命令,编制出适合于双点后方交会坐标计算的程序。
该程序只需一次启动,按提示依次输入已知两点坐标、观测角数据后,直接求出所需的两点坐标,非常快捷、方便、适合于野外作业。
目前大部分的测量技术人员使用的计算器均为CASIOfx-4800p(或fx-4500p)计算器;针对此种计算器编制如下程序。其中{}里内容是为了方便阅读加上的注释。↙代表“EXE”回车键。
1)编程操作步骤
按“ACON”键:开机;
按“MODE”键:进入模式选择;
再按“5”键:进入程序编辑;
再按“1”键:进入新建程序;
按“SH IFT”再按“ALPHA”键:进入大写字母锁定;
按 2、D、H、F、J 键:输入程序名 2DHFJ(坐标计算主程序名);
按“EXE”再按“1”键:进入程序内容编辑界面。
(主程《序2DHFJ)输入如下:
C“XA”:D“YA”:E“XB”:F“YB”:{输入已知 A、B点坐标}
M“A1”:N“B1”:O“A2”:P“B2”:2{输入观测角a1、b1、a2、b2}
R=sinO·sin(N+P)/sinP/sin(M+O):{计算 Q值}
S=tan-1{(1-R)/(1+R)÷tan((M+N)/2)}:
A=S+90°-(M+N)/2 :B=A-2S:{计算 r1、δ1}
prog“QFZ”:↙{转入子程序计算 P1点坐标}
K=180°-(M+O+A) :L=180°-(N+P+B) :{计算 r2、δ2的值}
U=C:V=D :C=E:D=F :E=U :F=V :{A、B点坐标互换}
A=L :B=K:{r2、δ2的值互换}
prog“QFZ”:“END”↙{转入子程序计算P2点坐标,程序结束}
程序输入完成,按“MODE 1”退回开机界面。
(子程序QFZ)的输入同主程序类同,进入程序编辑界面后,输入如下:G=1÷tanA+1÷tanB:X“XP”=(C/tanB+E/tanA-D+F)÷G ◢
Y“YP”=(D/tanB+F/tanA+C-E) ÷G ◢ ↙程序输入完成,按“MODE 1”退回开机界面。
2)程序使用方法
直接启动“2DHFJ”主程序后,按提示依次输入坐标 XA、YA、XB、YB,观测角 a1、b1、a2、b2,按“EXE”回车键,即可得到 P1点的坐标(XP,YP);继续按“EXE”回车键又可得P2点的坐标。
3 双点后方交会程序测量应用实例
在大新锰矿进行矿山测量时,经常遇见的一个问题是:标定天井出口位置,或者测量地表现状图。要做这些工作,首先附近必须要有测量控制点。而大新锰矿的现状是:整个矿区是一弯曲的沟带地形,两边是高山,以前的控制点都布置在两边的高山上,由于年代已久,部分已遭到破坏;另一方面,露天开采,地表破坏严重,地面不可能有控制点。现要在这些地方作测量工作,首先必须作加密图根点(或者说引测测量控制点)。在没有 GPS测量仪器的情况下,通常的加密图根点方法是3点后方交会法、前方交会法和导线法。3点后方交会法必须有3个已知点,在这受地形限制,一般只见2个已知点,无法使用3点后方交会法,而前方交会法或导线法都必需要登上山顶进行施测。由于年代已久,无路可寻,要登上山顶测量是非常困难的。这时,用双点后方交会法,就可非常方便、快速地解决这一难题。
下面是一个在标定天井出口位置时,引测控制点的一个实例(P1、P2为所引测的控制点)。观测示意如图2。
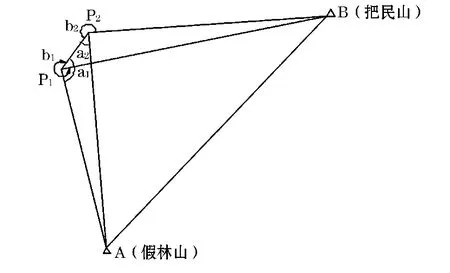
图2 观测示意
已知:假林山A点坐标(X=2 535 062.24 m,Y=36 365 587.89 m),把民山 B点坐标(X=2 536 125.59 m,Y=36 366 597.87 m);
分别在P1、P2点设置测站观测,观测角值如下:
a1=130°26′58″;b1=316°49′03″;
a2=40°22′41″;b2=230°39′29″;
现用CASIOfx-4800p计算器程序法计算 P1、P2点坐标。
按“ACON”键:开机;
按“FILE”键:进入程序文件列表;
按上下光标键找到“2DHFJ”
按“EXE”键:屏幕显示 XA?;
输入A点X坐标2 535 062.24:
屏幕显示2 535 062.24;
按“EXE”键:屏幕显示 YA?;
输入A点 Y坐标36 365 587.89:
屏幕显示36 365 587.89;
按“EXE”键:屏幕显示 XB?;
输入B点X坐标2 536 125.59:
屏幕显示2 536 125.59;
按“EXE”键:屏幕显示 YB?;
输入B点 Y坐标36 366 597.87:
屏幕显示36 366 597.87;
按“EXE”键:屏幕显示A1?;
输入观测角 a1 130°26′58″:
屏幕显示 130°26′58″;
按“EXE”键 :屏幕显示 B1?:
输入观测角 b1 316°49′03″:
屏幕显示 316°49′03″:
按“EXE”键:屏幕显示A2?;
输入观测角 a2 40°22′41″:
屏幕显示 40°22′41″;
按“EXE”键 :屏幕显示 B2?:
输入观测角 b2 230°39′29″:
屏幕显示 230°39′29″;
按“EXE”键两次:屏幕显示所求 P1点的坐标X、Y分别为:
XP=2 535 883.85
YP=36 365 383.21继续按“EXE”键两次:屏幕显示所求P2点的坐标X、Y分别为:
XP=2 536 053.34
YP=36 365 504.38
上述计算十分方便、快速,适合野外作业、计算。
以上实例,如果用前方交会法,登上山顶进行施测,同等人力物力,最少要用1~2 d的时间,而使用双点后方交会法进行测量,在1 h内即可得到结果。可以这么说,这时候双点后方交会法在测量中的优越性是无可替代的。
当然,双点后方交会也有它的缺点;由于可用控制点较少,缺乏检验性,因此,在实际应用中必须十分细心,测量时所有观测角均须两个测回以上,做测回差检核[4],保证观测数据正确无误。
[1]蒋维恒,章书寿.测量学[M].北京:测绘出版社出版,1985.
[2]葛永利.后方交会测量方法实践[J].矿业快报,2001,(7):12-13.
[3]林丽江.论后方交会测量方法和内业电算程序的应用[J].企业科技与发展,2009,(10):116-118.
[4]李五夫.两点后方交会原理及其精度分析[J].测绘工程,1996,2(5):59-63.
猜你喜欢
全球定位系统(2021年1期)2021-03-26
当代水产(2019年1期)2019-05-16
北京航空航天大学学报(2017年4期)2017-11-23
科技创新导报(2017年14期)2017-08-24
智能计算机与应用(2017年1期)2017-03-23
中国工程咨询(2017年12期)2017-01-31
知识就是力量(2016年9期)2016-11-02
太空探索(2016年9期)2016-07-12
中国交通信息化(2015年10期)2015-06-06
全球定位系统(2015年4期)2015-02-28
