
基于四邻域检索的自适应阈值分割方法
2011-01-10 03:37钱苏斌
成都大学学报(自然科学版) 2011年3期
钱苏斌
(盐城师范学院信息科学与技术学院,江苏盐城 224002)
0 引 言
在对图像的研究中,研究人员往往只对图像中的某一部分感兴趣,这样的区域称之为目标区域,除此以外的区域则称之为背景区域.为了能够对目标区域进行针对性的研究与应用,常常需要将其从背景中分离出来,这就需要用到图像分割技术,即将图像按照灰度、颜色、纹理等性质分成各具特性的区域,从而提取出所需的目标区域.早期的图像研究中,图像分割技术主要包含边界方法和区域方法[1].然而,随着计算机视觉技术的发展,图像分割技术已由上述两种基本方法衍生出4种主要分割技术:并行边界分割技术、串行边界分割技术、并行区域分割技术、串行区域分割技术[2].其中,并行区域分割技术应用较为广泛[3-4].同时,还出现了一些基于常用基本算法的图像分割技术[5].由于图像分割技术的难点在于图像数据的模糊和噪声的干扰,到目前为止仍然没有一种或者几种完善的图像分割技术可以完全按照研究人员的意愿准确地分割任何一种图像.比如,图像的目标区域由于光照原因会存在若干个高光点,在对图像进行分割后,目标区域依然会存在上述高光点,这一现象势必会影响到图像处理的最终效果.针对上述情况,本文提出一种基于并行区域分割技术的自适应阈值分割方法,并通过四邻域检索技术解决了图像分割中广泛存在的高光点问题,较好地实现了图像分割.
1 自适应阈值分割方法
1.1 阈值分割
在实际应用中,图像并行区域分割技术主要包含阈值化方法和特征空间聚类方法.其中,阈值化方法主要是确定一个处于图像灰度取值范围当中的灰度阈值,并通过该阈值将所有像素点归为两类,一类是灰度值大于该阈值的像素点集合,另一类是灰度值小于该阈值的像素点集合.一般情况下,两类像素点集合分别属于图像中的目标与背景区域.
根据上述定义,阈值分割方法主要包含以下步骤[6]:灰度阈值的确定;将像素值与灰度阈值进行比较,并且精确分类.其中,阈值的确定是关键.
阈值一般分为局部阈值和全局阈值两种.当图像中出现照明不均匀或者背景灰度变化比较大的时候,单一的全局阈值不能够兼顾图像各个像素的实际情况.此时,应当考虑到对整幅图像中的不同区域采用不同的阈值进行分割的方法.
1.2 自适应阈值分割方法
对于一幅由于照明不均而显示多个局部特征的图像,本文提出一种自适应的阈值分割方法,即根据图像本身像素灰度值分布,将图像分为如图1所示的M1、M2、M3、M4 4个子图像模块,对每一个子图像模块按照灰度值均值计算该子模块的阈值:首先,对左下图像进行自下往上、自左往右的逐点扫描,并将各点灰度值存储在相关变量中.当扫描结束后,利用该子模块内的所有像素点灰度值累加和及像素点个数获得该子模块的局部阈值,即如图1所示的Thd1、Thd2、Thd3、Thd4.然后,利用上述自适应阈值分割方法对如图2(a)所示的对象进行阈值分割操作,得到如图2(b)所示的效果.
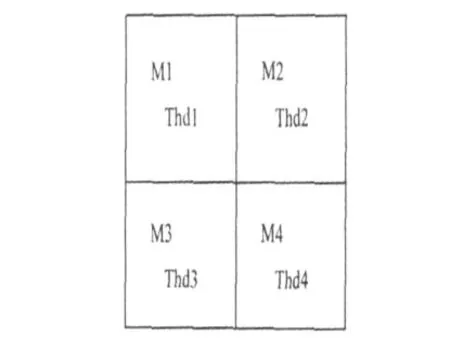
图1 子模块划分
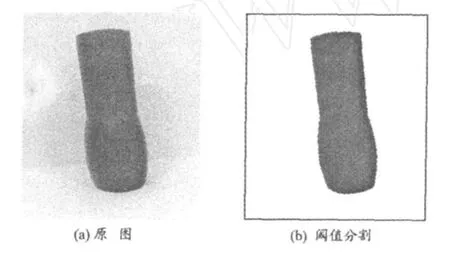
图2 自适应阈值分割方法
2 基于四邻域检索自适应阈值分割方法
通常,图像的目标区域往往会由于光照原因存在若干个高光点,在对图像进行分割后,目标区域依然会存在上述高光点,并且呈现出白光区.如图3 (a)所示为一只具备光照效果的花瓶,对其运用上述自适应阈值分割操作后,效果如图3(b)所示.显然,经过分割后的目标区存在由于高光点而导致的白光区.
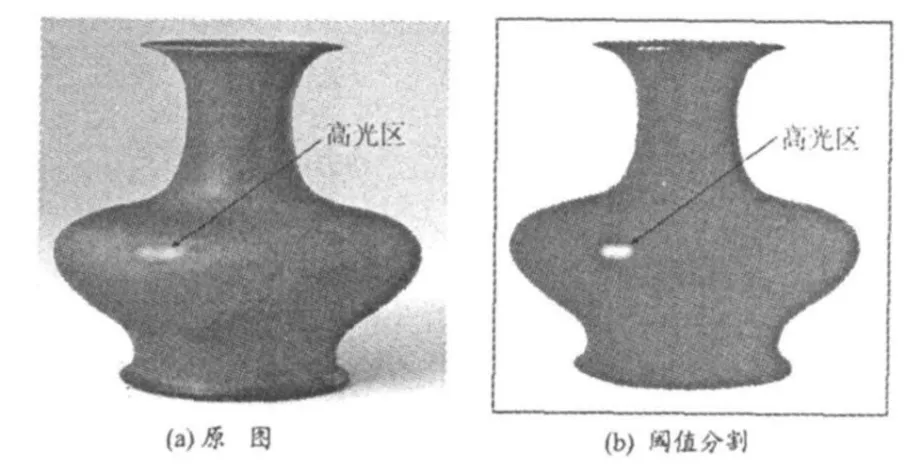
图3 高光区效果示意图
为了避免上述白光区的存在,在对图像子模块进行逐点扫描过程中,增加四邻域检索过程(见图4).如图4所示,currentpoint为当前扫描点,uppoint、downpoint、leftpoint、rightpoint分别为其上下左右4个邻域点.按照自下向上、自左向右的扫描顺序,根据当前扫描点的左邻域、下邻域点的扫描情况来判断当前点的赋值情况.如果leftpoint和downpoint在扫描后均为目标区域像素点,则当前像素点也应当为目标区域像素点;如果leftpoint或downpoint中之一非目标像素点,则当前点为背景区域像素点.

图4 四邻域检索示意图
利用上述四邻域检索方法辅助自适应阈值分割过程,得到如图5所示的分割效果.
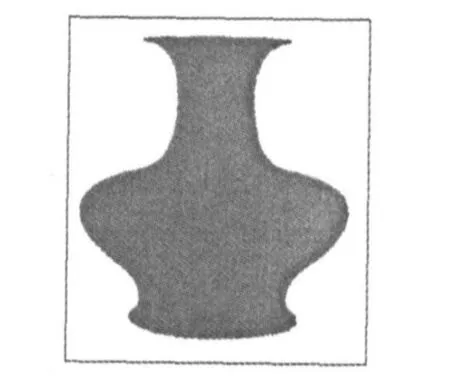
图5 四邻域检索辅助阈值分割效果示意图
3 算法实现
我们以VC++6.0为开发工具,实现了本文所提出的基于四邻域检索的自适应阈值分割算法.以左下图像子模块为例,算法的部分代码如下:
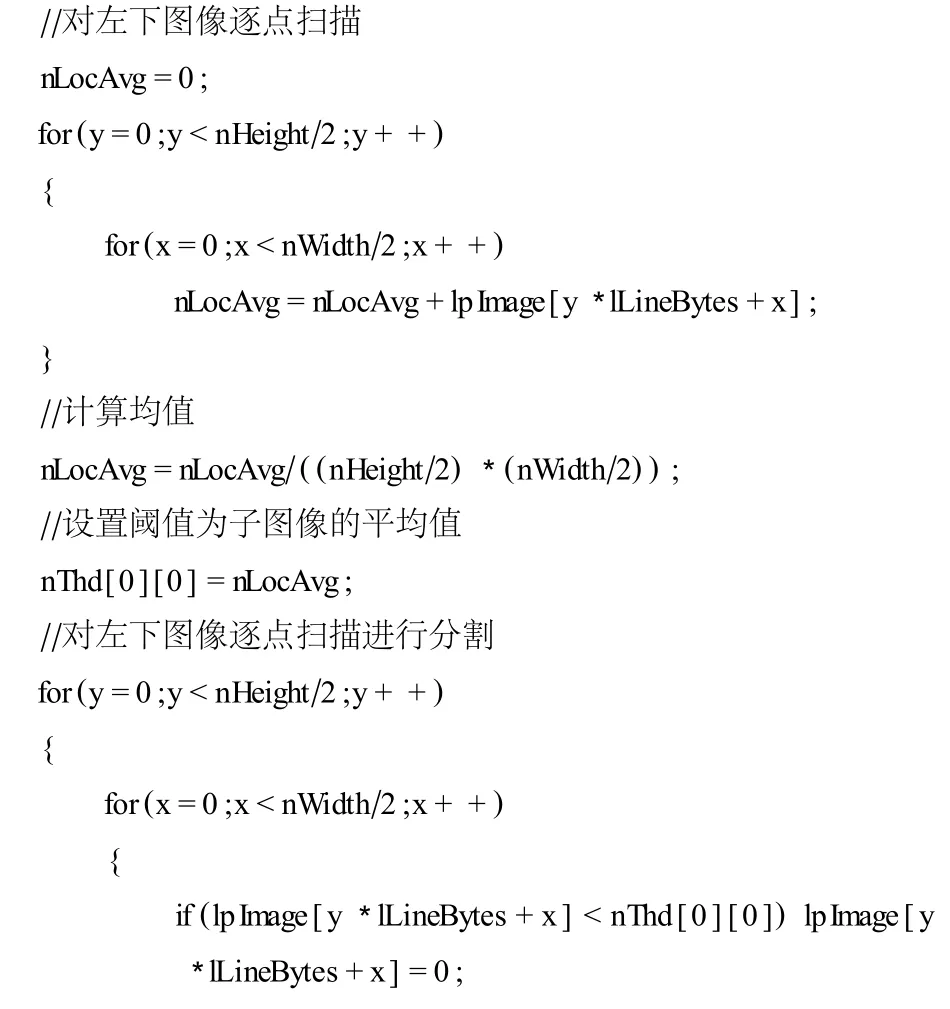
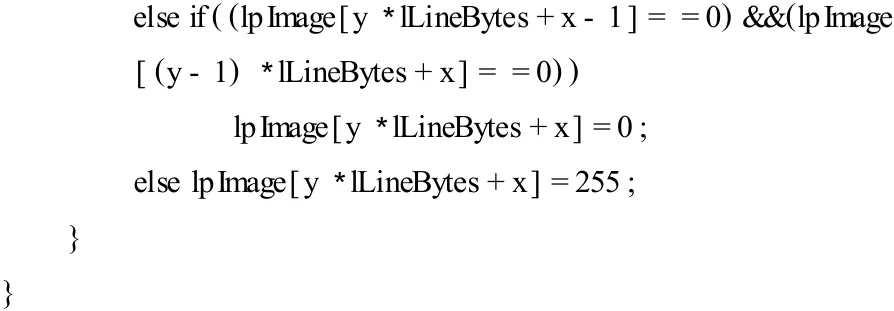
图6(a)为经过Sony 707数码照相机拍摄得到的24位真彩色花瓶图片,将其转换成256色灰度图后进行阈值分割操作,最终得到如图6(b)所示的效果.
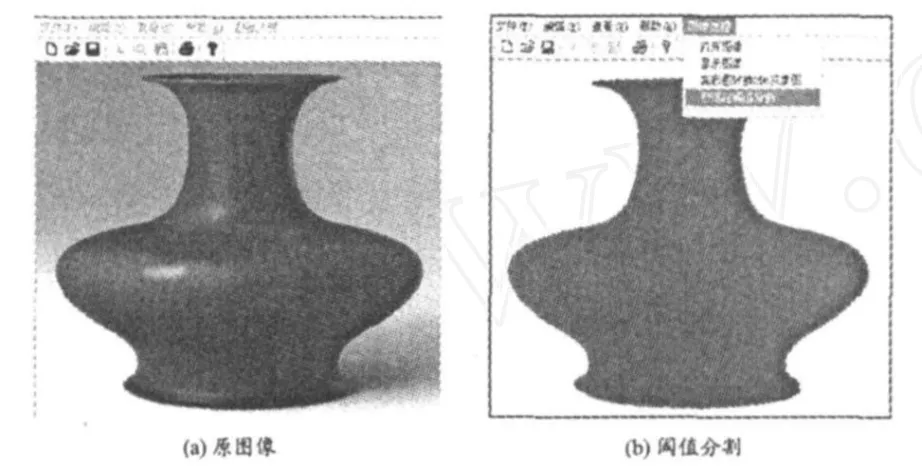
图6 基于四邻域检索的自适应阈值分割方法效果图
4 结 论
本文所提出的基于四邻域检索的自适应阈值分割方法,可以方便快捷地实现物体的目标区域提取,并有效避免由于光照所产生的高光区的出现.但是,本算法也存在一定的局限,比如,处理对象形状比较简单,同时还存在时间复杂度和空间复杂度比较大的问题.在今后的研究过程中,将着力于解决以上问题,使得算法的性能得以进一步提高.
[1]章毓晋.图象处理和分析[M].北京:清华大学出版社, 1999.
[2]冈萨雷斯.数字图像处理[M].北京:电子工业出版社, 2007.
[3]阴国富.基于阈值法的图像分割技术[J].现代电子技术, 2007,31(23):107-108.
[4]马驰,张红云,苗夺谦,等.改进的多阈值动态二值化方法[J].计算机工程,2006,32(6):203-208.
[5]郑丽萍,李光耀,姜华.基于微粒群算法的灰度图像阈值分割的改进[J].计算机工程与设计,2010,31(3):559-563.
[6]朱志刚.数字图像处理[M].北京:电子工业出版社,2002.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
现代电子技术(2021年1期)2021-01-17
吉林大学学报(理学版)(2020年3期)2020-05-29
上海大学学报(自然科学版)(2018年5期)2018-11-02
自动化学报(2018年7期)2018-08-20
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年5期)2017-05-14
自动化学报(2017年11期)2017-04-04
光学精密工程(2016年1期)2016-11-07
