
三维水弹性集成软件的设计与实现
2011-01-19 05:49金建海叶永林邹明松冷文浩
船舶力学 2011年5期
金建海,叶永林,田 超,邹明松,冷文浩
(1江南大学 物联网学院,江苏 无锡214122;2中国船舶科学研究中心,江苏 无锡 214082;3中国船级社,北京 100007)
三维水弹性集成软件的设计与实现
金建海1,2,叶永林2,田 超3,邹明松2,冷文浩2
(1江南大学 物联网学院,江苏 无锡214122;2中国船舶科学研究中心,江苏 无锡 214082;3中国船级社,北京 100007)
为了满足三维水弹性软件商用化的应用要求,文章通过对已有三维水弹性程序的使用经验的分析,设计并实现了其前后处理功能模块,形成统一的商用化集成软件。并以某18万吨的散货船为例,利用该商用集成软件进行分析处理,用以进一步展示完成的集成软件的功能。最后给出了软件进一步发展的设想。
三维水弹性;前后处理;模态筛选;主坐标响应
1 引 言
现代船舶设计制造技术发展的历史,也是船舶力学发展的历史。船舶力学的主要研究内容可以概括为两大学科:船舶结构力学和船舶水动力学。到上世纪70年代末,两者的交叉与融合促成了一门新的学科分支—船舶水弹性力学(Hydroelasticity)的建立。船舶水弹性力学是从动力学的观点出发,将柔性船体与周围流场作为一个相互作用的整体系统进行描述和分析,并在此基础上预报船体结构的动力学特性,诸如:船体运动、波浪载荷、结构变形、应力应变以及疲劳性能等,以更合理地预报和评估船舶及海洋工程结构的运动特性、可靠性和安全性[1-2]。
三维水弹性理论从1984年建立以来,发展了考虑航速等因素的数值方法[3]。1997年提出了二阶非线性水弹性理论,考虑了由船体大型刚体运动和瞬态湿表面引起的非线性水动力,其后完善了相应的数值分析方法,并应用于SWATH船[4]及大型散货船[5]等。
本文的工作主要介绍在中国船舶科学研究中心现有的三维线性频域水弹性分析程序“THAFTS”基础上,增加其前后处理功能模块,形成新的工程实用化的三维水弹性集成软件,并利用该集成软件,对某18万吨级的散货船进行主坐标响应计算。在文章最后部分,给出了软件进一步发展的展望。
2 三维线性水弹性分析基本原理
上世纪70年代中期,随着大型计算机的出现,各种用于分析大型海洋浮动结构耐波性问题的三维水动力学方法相继发展起来,Wu[6]开创性地将三维适航性理论与三维结构动力学理论相结合,提出了广义流固界面条件,发展了一个适用于分析波浪中任意三维可变形体承受内、外激励时动响应性能的三维水弹性理论。
简化的三维线性水弹性力学理论认为船体结构周围的流体为理想、不可压缩流体,波浪幅值为小量,此时可得航行船体的频域线性水弹性运动方程为:

3 三维线性水弹性程序简介
现有的三维水弹性系列程序都是以吴有生院士的三维线性频域水弹性力学程序为基础发展起来的[1,3,7]。它利用三维水弹性理论,分析任意形状海洋浮体结构在各种航行条件下,浮体结构在波浪力、系泊力和任意强迫外激励力的作用下的刚体运动和弹性变形等响应。目前三维线性频域水弹性程序包“THAFTS”由三个模块程序组成。
其中第一个程序FLXBD计算弹性结构湿表面几何特性以及各阶模态的湿表面边界条件和广义流体恢复力系数;第二个程序HYCOF计算弹性浮体结构周围流场速度势,计算结构在单位幅值规则波中刚体运动和弹性变形模态的广义水动力系数和广义波浪激励力。第三个程序HYELAS求解各阶模态的主坐标响应。
4 水弹性集成软件功能模块设计与实现
为实现商业化的水弹性集成软件,需要增加原有“THAFTS”程序的前处理模块,以方便地自动生成输入数据文件,并自动启动程序进行计算;增加后处理模块,以直观地显示计算结果。
下文将在理解输入输出数据文件内容的基础上,结合水弹性分析经验,设计并实现前后处理模块,并与原有的“THAFTS”程序一起,形成统一的水弹性集成软件。
4.1 水弹性程序输入输出数据文件内容
水弹性程序“THAFTS”的输入数据文件主要包括flxbd.in、hycof.in以及hyelas.in;输出文件比较多,但主要是主坐标响应计算结果的输出。
4.1.1 flxbd.in输入数据文件内容
FLXBD程序的数据输入文件,其输入内容分类后可以分成以下6个部分:
(1)船体干结构有限元模型信息
这类数据主要表征原干结构有限元模型的Mesh信息,主要有:
单元总数、节点总数和各个节点的ID和坐标;
梁单元总数、组成梁单元的节点ID;
板单元总数、组成板单元的节点ID。
干结构坐标系与平衡坐标系之间的关系(原点偏移、坐标轴夹角余弦)。其中平衡坐标系示意图如下:

(2)船体干结构各阶模态的模态信息
该类数据主要有弹性模态数、各阶模态的固有频率、广义质量、广义阻尼、振型放大系数、左右对称性,以及各阶弹性模态下的节点振型等。
(3)船体湿表面网格信息
这类数据主要表征原船体湿表面网格的Mesh信息,包括湿面元节点数、单元数,以及节点坐标,组成各个湿面元的节点ID等。
(4)干湿单元组对应关系
FLXBD程序计算弹性结构湿表面几何特性以及各阶模态的湿表面边界条件,需要在输入文件中指定干单元的分组情况、湿单元的分组情况,以及每组干单元对应哪几组湿单元。
(5)船体特征参数
船体特征参数包括以下数据内容项:对称特性参数、船长、艏柱至重心的水平距离、排水体积、重心距水线面的距离、横摇惯性矩、纵摇惯性矩、摇艏惯性矩以及横摇/艏摇惯性矩。
(6)计算控制参数
控制计算过程的相关参数,包括是否计入刚体位移参数等,这部分的控制参数可以全部采用默认值固定。
4.1.2 hycof.in输入数据文件内容
HYCOF程序的数据输入文件,可分为海况参数和求解控制参数。
其中海况参数主要有波幅、波角、速度、波浪频率等。
求解控制参数主要有求解方法选择控制参数、压力输出选择控制参数等。
4.1.3 hyelas.in输入数据文件内容
HYELAS程序的数据输入文件,内容主要包括船体干结构各阶模态的模态信息、船体特征参数和求解控制参数。其中求解控制参数需要考虑的主要有:
要求输出广义附加质量、广义附加阻尼和广义波浪激励力的种类数;
要求输出的广义附加质量、广义附加阻尼或者广义波浪激励力对应的角标号。而其他内容在前面两个数据输入文件中都已出现过。
4.1.4 ResponseTC2.dat输出数据文件内容
该输出文件存储的是计算频率点的响应结果,包括各阶模态,各个频率下的主坐标响应的幅值和相位。
4.2 水弹性集成软件功能模块设计
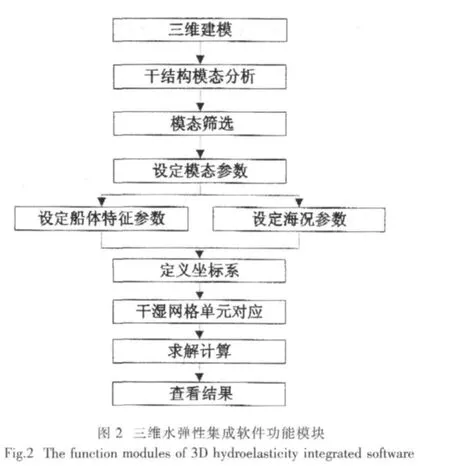
通过对THAFTS三个模块程序输入数据文件内容的分析,以及工程中的使用经验,三维水弹性集成软件可设计成如图2所示的功能模块图:
(1) 三维建模
使用目前成熟的商用软件,或者参数化建模等方式,建立船体干结构三维有限元模型,以及用于水动力分析的船体湿表面网格模型[8]。并通过开发接口软件的方式,将干结构模型和湿面元模型都导入到集成软件中。
(2)干结构模态分析
使用Nastran等成熟的商用CAE求解器,或者其他自研方法,依靠其有限元模型,计算船体干结构的振动模态。并读取模态计算结果文件,包括各阶模态的固有频率、节点振型等。
(3) 模态筛选
模态分析之后,要选择进行水弹性计算的模态。主要是筛选总模态,以及热点区域局部模态。前者通过强结构节点变形提取,后者通过局部区域节点位移提取。软件应支持自动/手动两种方式。
自动方式主要包括“关键节点位移法”和“局部模态提取法”。
关键节点位移法是在强框架上选择n个关键节点,并指定变形值,如果某阶模态下这些节点的变形值大于指定的变形值,则认为该阶模态符合要求,自动将其挑选出来。
局部模态提取法就是剔除其中的局部模态,保留剩下的整体模态,以用于水弹性后续的计算。其中局部模态是指存在部分节点的振型特别突出的情况的模态,否则视为整体模态。其算法描述如下:
设节点坐标为(X k(0,0),Y k(0,0),Z k(0,0))第 k(0,0)个节点,该节点周围第一圈节点为 k(1,j),有 M 个;第二圈节点为 k(2,j),有 N 个,第三圈节点为 k(3,j),有 T个。节点模态归一化振型为A k(0,0),筛选规则可采用下式

式中,λ为灵敏度系数,可设置,默认设为5。满足上述不等式,则表明该模态为局部模态,可剔除。
手动方式设计成让用户可以在软件界面查看任一阶模态的节点振型云图,由用户自己根据变形云图来判断是否要选择该模态。手动方式可以单独使用,也可以在自动方式的基础上继续。
(4)设定模态参数
模态分析之后,各相关模态的固有频率、广义质量都已经具备,但还需要设定界面让用户可以直接输入各模态的广义阻尼、振型放大系数以及对称性。
(5)设定船体特征参数
该模块提供界面让用户可以方便地输入船体特征参数。
(6)设定海况参数
该模块提供界面让用户可以方便地输入海况参数。
(7)定义坐标系
在三维建模过程中,干结构模型参考坐标系与水弹性计算的平衡坐标系未必一致,因此需要在干结构模型中定义平衡坐标系,用以计算两个坐标系之间的原点偏移和坐标轴夹角余弦。
同时湿网格模型采用的坐标系也未必就是水弹性计算所需要的湿面元坐标系,因此需要在已有的模型中定义湿面元坐标系,在生成flxbd.in文件时,需要将节点坐标转换为湿面元坐标系下的坐标。
(8)干湿网格单元对应
支持用户自动或者手动设计干单元组和湿单元组,并设定干湿单元组的对应关系。
(9) 求解计算
该模块用以设定求解控制参数,在用户确认之后,依照之前完成的内容,生成输入数据文件,并依次调用三个模块程序,完成水弹性计算程序的计算。
(10) 查看结果
显示计算结果的后处理阶段,目前可先将完成主坐标响应的曲线显示,并能结合模型节点振型,以云图/动画的形式显示模型的运动响应。
其中主坐标响应可以从结果文件中直接读取,结构运动响应可用主振型位移的迭加表示:

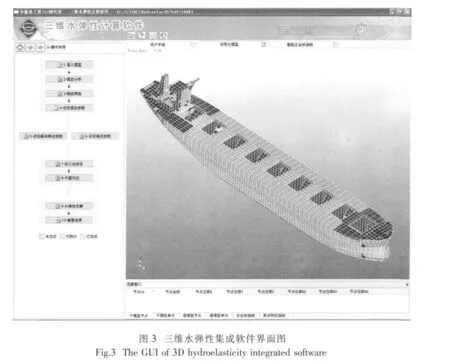
4.3 水弹性集成软件的实现
按照上面的设计思想,我们在中国船舶科学研究中心自研的Smart集成定制平台基础上,进行集成开发,其实现的软件界面如图3所示。
5 应用实例分析
下面以某18万吨级的散货船为例,使用水弹性集成软件对其进行分析。其主尺度如下表所示。

?
该船的干结构有限元模型已经采用通用大型有限元软件Msc.Patran建立(存储于180K.bdf文件中),其用于水动力分析的湿表面网格也已经建立(存储于180K_wet.bdf)。
下文介绍其使用过程如下:
(1)导入模型:选择“导入干结构有限元模型文件”选项,干结构有限元模型文件选择文件“180K.bdf”,选择湿表面网格文件“180K_wet.bdf”。成功导入后,可看出该有限元模型文件包括11 427个节点,15 652个板单元。
(2)模态分析:根据之前选择的BDF,通过后台调用Nastran进行模态分析,一般需要位移归一化,这里共输出100阶模态。
(3)模态筛选:根据4.2节中所述的关键节点位移法,先自动进行总体模态的初步筛选(共选出20阶模态),然后在此基础上,通过人工查看各阶模态的变形图,并根据对称、反对称变形,分别挑选出前四阶总体模态,共8阶,见图4和图5。

(4)设定模态参数:在挑选出的各阶模态基础上,有关模态信息的主要数据都已经具备(从模态分析结果文件中读取获得),但还要再手工设定各阶模态的广义阻尼和振型放大系数参数。其中广义阻尼按经验取值0.05,由于已经实现位移归一化,振型放大系数取默认值1.0。
完成模态参数设定后的表格如下表所示:
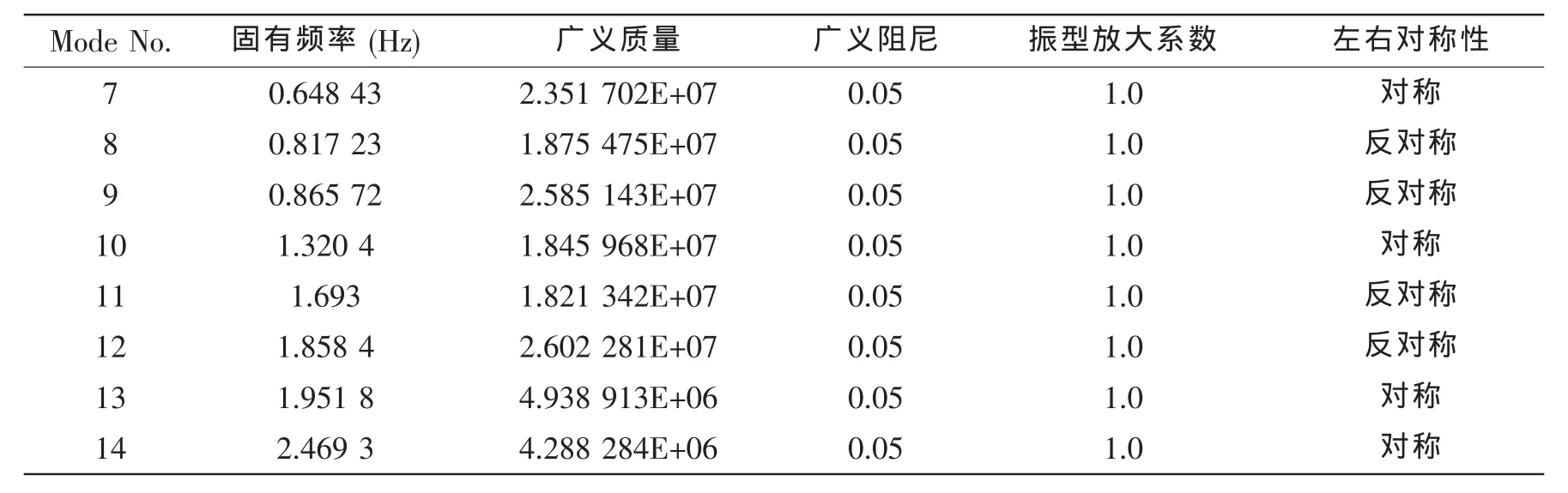
Mode No. 固有频率(Hz) 广义质量 广义阻尼 振型放大系数 左右对称性7 8 9 1 0 11 12 13 14 0.648 43 0.817 23 0.865 72 1.320 4 1.693 1.858 4 1.951 8 2.469 3 2.351 702E+07 1.875 475E+07 2.585 143E+07 1.845 968E+07 1.821 342E+07 2.602 281E+07 4.938 913E+06 4.288 284E+06 0.05 0.05 0.05 0.05 0.05 0.05 0.05 0.05 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0对称反对称反对称对称反对称反对称对称对称
(5)设定船体特征参数:结合船体示意图,手动输入该散货船的Lpp、艏柱距重心的水平距离、排水体积等参数。
(6)设定海况参数:考虑一个航速,速度为0;一个入射波波角,180°(迎浪);波幅为1.0m,入射波频率考虑从0.05rad/s开始,并以0.05递增到20,共计400个频率。
(7)定义坐标系:这里建立的干结构模型坐标系与平衡坐标系是平行的,只有原点不一致,因此定义平衡坐标系时只要指定干坐标系中重心的坐标即可。而湿表面网格模型已经在湿面元坐标系下建立,因此不需要再额外定义。
(8)干湿网格对应:选择干结构模型外表面的网格单元为一组(干单元组1),选择所有的湿表面网格单元为一组(湿单元组1),并确定干单元组1对应湿单元组1。
(9)求解计算:求解计算时需要先指定求解控制参数,其中输出数据类型,用户可以指定自己关心的广义附加质量、广义附加阻尼的矩阵对角元素,其他均采用软件推荐的默认值即可。确认后,点击求解计算按钮,即可进行自动的分析求解,软件将依次调用原THAFTS程序包中的FLXBD、HYCOF和HYELAS模块程序。软件运行结果文件与原有的手工过程完成的结果一致。
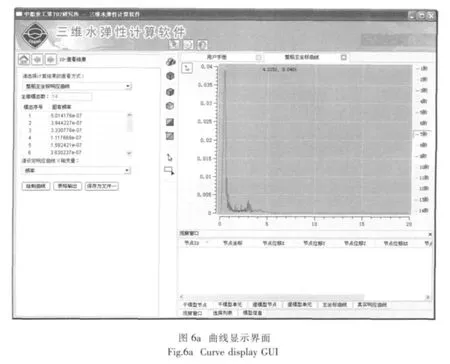
(10)结果查看:可进行主坐标响应的曲线显示、船体运动响应云图和动画显示等,如图6a和图6b分别给出的是曲线和云图显示的界面。

6 结论与进一步展望
本文在中国船舶科学研究中心现有的三维线性频域水弹性分析程序“THAFTS”基础上,根据输入输出文件的内容和工程使用经验,增加其前后处理功能,形成新的工程实用化的三维水弹性集成软件,并利用该集成软件,对某180k吨散货船进行分析计算。其使用过程符合工程软件的要求,大大提高了三维线性水弹性分析软件的易用性。
除了本文介绍的三维线性水弹性程序,杜双兴在此基础上建立的更为严格的带航速的三维线性水弹性力学频域数值分析方法[9],田超建立的大浪中航行船舶的三维非线性水弹性分析方法[1],以及“十一五”期间中国船舶科学研究中心发展的声介质中船舶结构三维水弹性计算方法[10],都将统一集成到本文介绍的集成软件中。
此外,在前处理方面,将逐步实现常规船舶(潜艇)的三维参数化有限元建模,以进一步提高效率;在后处理方面,将结合应用领域的不同,如船体运动、波浪载荷、结构变形、应力应变以及疲劳性能分析等,集成这些领域的专业处理方法,形成更加直接的预报结果,并可结合虚拟现实技术,提供情景化的船舶在波浪中运动的性能分析。
[1]田 超.航行船舶的非线性水弹性理论与应用研究[D].上海:上海交通大学,2007.
[2]田 超,吴有生.船舶水弹性力学理论的研究进展[J].中国造船,2008,49(4):1-11.
[3]杜双兴.完善的三维航行船体线性水弹性力学频域分析方法[D].无锡:中国船舶科学研究中心,1996.
[4]Tian Chao,Wu Yousheng.The second-order hydroelastic analysis of a SWATH ship moving in large-amplitude waves[J].Journal of Hydrodynamics,Ser.B,2006,18(6):631-639.
[5]Tian Chao,Wu Yousheng,Chen Yingqiu.Numerical predictions on the hydroelastic responses of a large bulker in waves[C]//Proceedings of the 5th International Conference on Hydroelasticity in Marine Technology.University of Southampton,UK,8th-10th Sept.,2009:205-213.
[6]Wu Y S.Hydroelasticity of floating bodies[D].Brunel University,UK,1984.
[7]王志军.箱式超大型浮体结构的水弹性响应研究[D].上海:上海交通大学,2001.
[8]戴愚志,余建星.一种船体及周围自由面的网格自动生成方法[J].船舶工程,2006,28(5):118-123.
[9]Du S X,Wu Y S,Price W G.Forward speed effect on the structure responses of a ship traveling in waves[C]//Proceedings of 2nd International Conference on Hydroelasticity in Marine Technology.Fukuoka,Janpan,1998:401-410.
[10]金建海,谢基榕,邹明松等.潜艇定量声学设计计算体系设计说明书[R].无锡:中国船舶科学研究中心报告,2010.
Design and implementation for 3D hydroelasticity integrated software
JIN Jian-hai1,2,YE Yong-lin2,TIAN Chao3,ZOU Ming-song2,LENG Wen-hao2
(1 School of IoT Engineering,JiangNan University,Wuxi 214122,China;2 China Ship Scientific Research Center,Wuxi 214082,China;3 China Classification Society,Beijing 100007,China)
In order to satisify the requiments of the commercial application of 3D hydroelasticity program,the pre-post processing modules for 3D hydroelasticity were designed and realized,and the integrated software was developed based on analyzing the experience of using the existing program.Then the example of a 180kton bulk cargo was given to illustrate how to use the Integrated Software and the basic functions of the software.Finally,the further function of the software was recommended.
3D hydroelasticity;pre-post processing;mode selection;principal coordinate response
U662.9
A
1007-7294(2011)05-0521-09
2011-02-22
“十一五”国家科技支撑计划制造业信息化工程重大项目(2006BAF01A43)
金建海(1978-),男,江南大学博士研究生,中国船舶科学研究中心高级工程师;
叶永林(1974-),男,中国船舶科学研究中心高级工程师。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
数学物理学报(2022年3期)2022-05-25
中国中医急症(2019年10期)2019-05-21
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
汉字汉语研究(2018年1期)2018-05-26
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
中国工程咨询(2017年10期)2017-01-31
焊接(2015年9期)2015-07-18
海军医学杂志(2015年2期)2015-02-27
