
基于TMS320DM6467的机车视频监控系统设计
2011-01-29 06:25贺德强刘德昌叶碧碧
制造业自动化 2011年13期
张 伟,贺德强,苗 剑,刘德昌,叶碧碧
ZHANG Wei, HE De-qiang, MIAO Jian, LIU De-chang, YE Bi-bi
(广西大学 机械工程学院,南宁 530004)
0 引言
随着铁路交通的大力发展,以及机车运行速度的不断提高,对机车的安全运行有了更高要求。目前机车状态传输系统[1]主要涉及机车牵引控制、机车制动控制、机车辅助控制、机车检测控制等方面内容,无法为地面工作人员提供机车运行的相关视频数据。因此,在机车上运用视频监控系统将是当前的一个发展趋势,其作用主要体现在:1)本地存储的视频数据可以为运行过程中的突发事件提供相关数据参考;2)结合3G技术的使用,可以对机车内的工作情况进行实时监控,保障机车的安全运行。本文论述了基于DM6467的嵌入式车载视频监控系统,并结合3G技术,实现对机车设备间、驾驶室、以及机车前行方向的视频采集编码、视频数据本地存储以及网络远程点播的功能。
1 方案总体结构
机车视频监控系统主要涉及多路视频采集编码、本地视频存储、3G视频传输模块发以及嵌入式QT/E控制界面四个部分。其中,多路视频采集编码是整个监控系统的重要环节。此外,机车视频监控系统利用3G技术,与地面服务器建立网络连接,地面客户端通过有线网络以B/S的方式访问地面服务器,整体形成“车—地”、“地—车”、“地—地”的立体通信模式,使地面工作人员可以通过视频对机车环境进行有效的监控。
机车视频监控总体结构如图1所示。
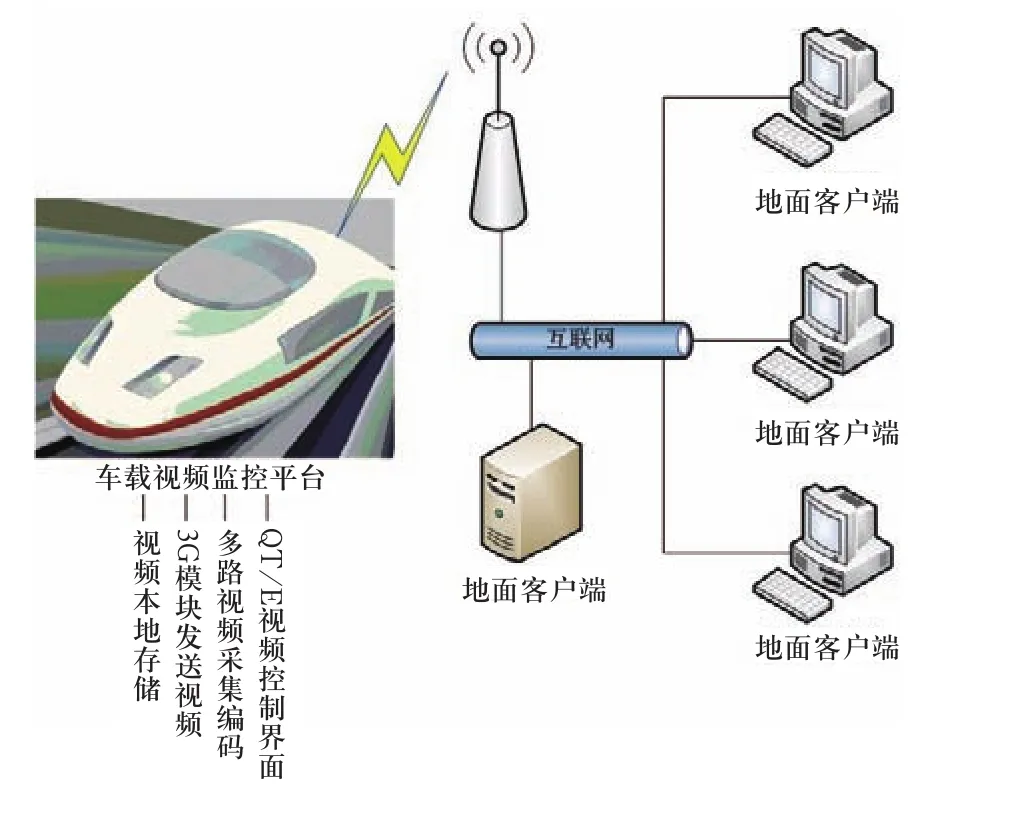
图1 机车视频监控总体结构
2 系统硬件设计
机车视频监控系统硬件主要由DaVinciTM核心模块、视频采集模块、3G无线通信模块、数据存储模块以及系统总线等几部分构成。
系统主要硬件组成如图2所示。
系统设计输入电源为+12V/5A,可分别提供+1.2V,+1.8V,+3.3V和+5V的电压。其中DM6467的核心电压为+1.2V,DDR2的电压为+1.8V,I/O设备电压为+3.3V,SATA电源电压为+5V,TVP5158供电部分为+1.1V,3G模块选用华为的MC703无线模块,其工作电压为+3.8V,其中+1.1V和+3.8V由+5V电源通过DC/DC获得。
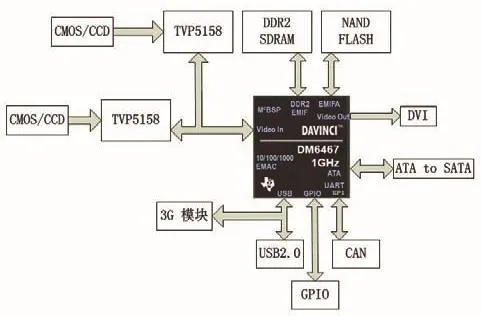
图2 车载视频监控硬件平台
2.1 DaVinciTM核心模块
系统的核心硬件选用TMS320DM6467[2],其充分利用了TI公司的DaVinci™技术,是一款具备高速数字媒体处理能力的新一代嵌入式设备,它集成了高性能的TMS320C64x + DSP内核和ARM926EJ-S内核,支持高清视频/影像协处理器 (HD-VICP)、视频数据转换引擎以及目标视频端口接口。
其中,ARM926EJ-S是一个32位RISC处理器内核,具有500MHz的时钟频率,执行32位或16位指令,处理32位、16位或8位数据。其内部包含一个协处理器和保护模块,拥有独立的16K字节的指令缓存以及8K字节的高速数据缓存。
TMS320C64x+DSP是TMS320C6000 DSP系列中性能最高的定点DSP产品,基于第二代高性能增强版本,使用超长指令字(VLIW)架构,在1GHz时钟频率下可以达到8000MIPS的运算能力,拥有64个32-bit的通用寄存器、8个独立控制单元,完全具备处理多路视频编码的运算能力。
2.2 视频采集模块
系统采用TI公司的视频解码芯片TVP5158,主要功能是将采集的模拟信号转换为数字信号。其主要特点是采用自动对比度控制与视频噪声过滤技术[3],可同时采集4通道视频数据,具有优异的视频解码性能。机车上设计采用8通道,分别为:设备间前后2通道,司机室前后2通道,以及机车两端各1通道,剩下2通道保留。根据视频采集系统需求,将16bit的视频输入接口作为2个8bit接口使用,扩展出一路TVP5158。因此,本系统设计使用两片TVP5158用于处理摄像头采集数据的转换工作,数据处理完毕后产生的并行数字信号以BT656码流格式输出,并从DM6467视频端接口(VPIF)流入。TVP5158的工作方式、采集状态等通过设置其内部寄存器来实现,寄存器的配置由I2C总线完成。
视频采集模块结构如图3所示。
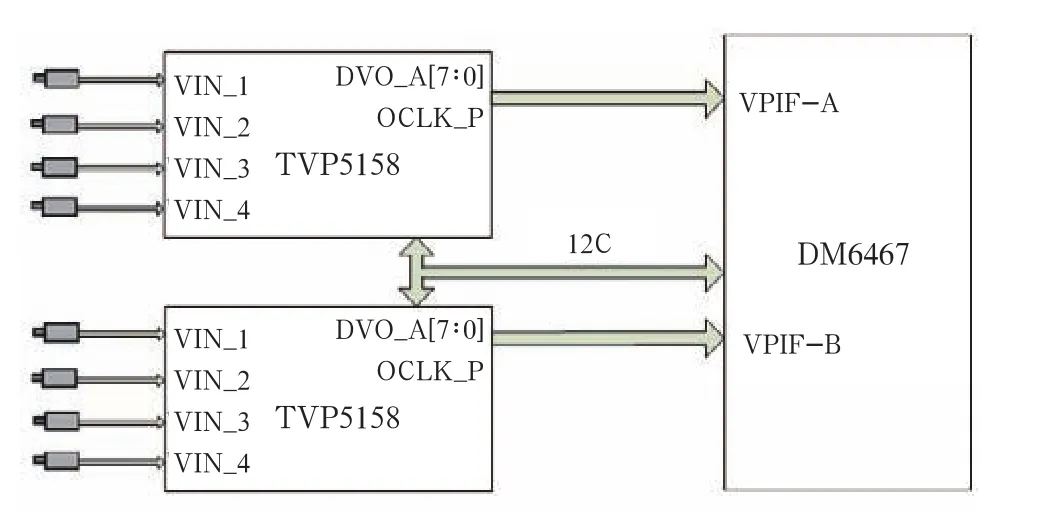
图3 视频采集模块
2.3 视频存储模块
视频存储功能主要是通过ARM端子系统控制。对编码完毕的视频,根据系统配置需要对视频数据进行本地存储。DM6467片上整合了ATA接口,并通过ACARD公司的ARC 772转换得到SATA接口。
ARC-772是SATA 3G-to-IDE桥接晶片,主要功能是接通IDE存储装置到SATA控制芯片,将SATA及IDE两者间的数据高速转换,达到3Gbps的双向数据传输。考虑机车高速行驶中的震动以及电气设备间存在磁场干扰,设计采用2.5寸80GB SSD固态硬盘作为存储介质。
目前国内视频采集主要采用两种格式:CIF和D1(4CIF)。其中CIF格式的分辨率为352×288,一小时录像占用硬盘大小约为200MB;D1格式的分辨率为720×480,一小时占用硬盘大小约为4倍的CIF格式,即800MB。综合考虑,系统默认采用CIF格式存储,可以保证更长的视频存储周期。在实际使用过程中可以增加硬盘大小或数量,使用视频效果更好的D1格式进行保存。对于超过保存期限的视频,系统对其自动删除,该功能通过ARM子系统中软件控制部分实现。
2.4 3G通信模块
MC703是华为公司推出的一款CMDA EVDO无线模块[4],使用CDMA 800/1900频段,支持天线分集接收,使用标准AT指令和HUAWEI扩展AT指令集。该产品正常工作环境温度为-30℃至+70℃,完全满足机车在各种恶劣环境下的工作要求。D6467通过USB总线与MC703模块进行通信和控制,处理器为USB主设备,模块为USB从设备,使用USB_DP和USB_DN两个引脚与MC703的USB_D-和USB_D+相连,电路如图4所示。通过配置Linux内核并加载设备驱动初始化模块,通过AT指令对模块进行控制。
3G模块的初始化流程为:1)系统将其USB端口映射为串口形式,并通过AT命令对其进行设置;2)进行PPP网络连接,使用脚本方式完成,连接成功后会在系统网络里识别出一个PPP的设备。
2.5 CAN总线
现有机车上的数据传输部分采用CAN总线方式,为了使视频监控系统与现有机车信息平台具有良好的兼容性,本系统扩展一路CAN接口,使用MCP2510 CAN总线控制器和TJA1050收发器。
MCP2510CAN总线控制器支持CAN2.0A/B[5],具有SPI接口,工作温度范围为-45℃至+125℃,完全符合工业环境要求。TJA1050 是控制器区域网络(CAN)协议控制器和物理总线之间的接口,是一种标准的高速CAN收发器。
DM6467具有串行外围接口(SPI),可以使用SPI_CS、SPI_CLK、SPI_SIMO、SPI_SOMI、EINT与MCP2510的CS、SCK、SI、SO、INT相连,并配合TJA1050收发器使用,支持CAN2.0B协议标准,电路如图4所示。
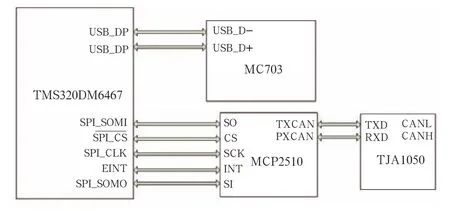
图4 MC703、MCP2510接口原理图
3 系统软件设计
系统软件开发基于CCS3.3完成[6],CCS(Code Composer Studio)IDE中集成了强大的DSP开发工具,并且支持双核开发,通过编写工程文件,分别生成DSP端子系统下和ARM端子系统下的.out执行文件,加载到不同的存储空间运行。系统基于Codec Engine框架实现H.264编码器[7],完成系统的视频编码。
3.1 QT/E系统控制平台
本系统的控制部分主要由ARM端实现,设计使用Linux嵌入式操作系统,根据需要对内核进行配置和剪裁。文件系统设计使用支持QT/E的文件系统,因此需要将QT/E库文件拷贝到相应的文件系统目录下,将生成的.bin文件移植到目标平台。
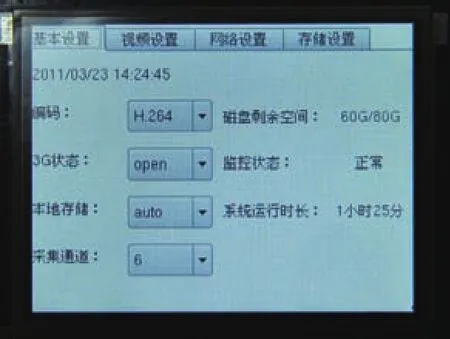
图5 系统控制平台
QT/E是一款应用于嵌入式的图形界面开发平台,其优点是可移植性好。QT支持众多平台,并且在各个平台上所使用的API是相同的,这就意味着对于不同平台所设计出来的应用软件,在相互移植过程中,只需要在相应的环境下进行少量修改甚至不修改,再重新进行编译即可以直接使用。本系统设计使用QT/E作为系统的控制界面,主要是对外设的管理以及参数的设置,其实际效果如图5所示。
3.2 Boa Web服务器
系统具备视频远程点播功能,该功能的实现是基于Boa Web服务器的应用。首先在PC机上配置并交叉编译Boa源码,然后移植到目标系统平台。当地面客户端选择查看机车视频的时候,采用B/S模式向地面服务器验证身份,并获取车载Boa Web服务器地址,然后根据用户等级向车载系统上的Boa Web服务器发送查看视频请求,Boa Web服务器根据请求内容发出相应的响应。
3.3 系统优化
系统数据处理中,保证视频编码的同步以及实时性的关键因素就是DSP端的运算速率。TMS320C64x+DSP内核具有L1/L2的片内存储空间,其中L1分为程序存储器L1P和数据存储器L1D,其大小都为32KB;L2具有128KB的片内存储空间。在处理数据的时候,应当将使用频繁的数据或指令保存在片内cache上,提高L1/L2命中率,从而提高系统运行速度。另外,本系统是运用在机车上的视频监控,可以通过针对机车运行环境优化H.264编码算法,达到系统整体性能的提升。
4 结束语
本文把DaVinciTM技术应用在铁路交通中,结合3G技术,实现了机车视频监控以及远程点播的功能。设计方案采用功能模块形式,使硬件和软件布局更加清晰。DM6467具备DSP和ARM双内核,使产品开发更加便捷,减少了开发周期,降低了开发成本,具有一定市场应用价值。通过测试,机车以110km/h速度运行,采集视频画面清晰流畅,完全达到了预期的要求,该技术在机车上的推广与应用,为其安全运营提供了有效的技术保障。
[1]章睿,苗剑,贺德强,等.AJAX技术在机车智能维护系统中的应用[J].广西大学学报:自然科学版,2010,35(4):273-276.
[2]TI.TMS320DM6467T Digital Media System-on-Chip[EB/OL].http://www.ti.com,2010-07.
[3]TI.TVP5158:Four-Channel PAL/NTSC Video Decoder[EB/OL].http://www.ti.com,2010-10.
[4]HUAWEI.MC703 CDMA EV-DO无线模块V100R001[EB/OL].2009,06.
[5]Microchip.MCP2510 Stand-Alone CAN Controller with SPITM Interface[EB/OL].2005-01
[6]赵勇,等.DAVINCI技术 原理与应用指南[M].南京:东南大学出版社,2008.
[7]卓力,等.基于DSP平台的H.264编码与网络传输的实时实现[J].北京工业大学学报,2010,36(7):882-889.
猜你喜欢
四川轻化工大学学报(自然科学版)(2021年1期)2021-06-09
哈尔滨铁道科技(2020年3期)2021-01-18
汉字汉语研究(2020年2期)2020-08-13
电子制作(2019年22期)2020-01-14
铁道通信信号(2019年2期)2019-03-26
疯狂英语·新读写(2018年3期)2018-11-29
电子制作(2018年11期)2018-08-04
中国铸造装备与技术(2017年3期)2017-06-21
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
