
永磁无刷直流电机控制的建模仿真
2011-03-17 12:25江苏省常熟职业教育中心何志强
湖北农机化 2011年3期
江苏省常熟职业教育中心 何志强
永磁无刷直流电机系统采用双闭环 (速度环、电流环)控制。其中速度环采用PID控制,其优点在于:可根据不同的运行条件,在保证系统控制精度的前提下,达到提高系统快速性且确保控制鲁棒性的目的。电流环仍然沿用传统的PID控制,可满足控制要求。
在Matlab/Simulink下,根据模块化建模的思想,图1即为在Matlab/Simulink下无刷直流电机控制系统的整体仿真框图。其中包含:无刷直流电机本体模块、速度环调节模块、电流环调节模块、转速给定模块和电压给定模块等。
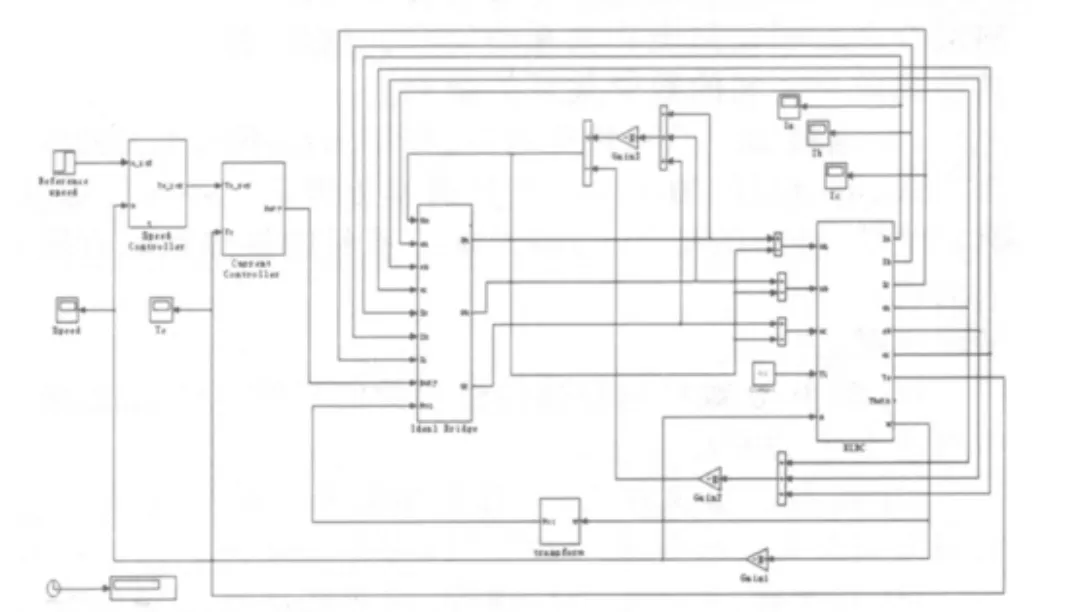
图1 无刷直流电机控制系统的整体仿真框图
1 无刷直流电机本体模块


进一步简化为:

根据式(2)和式(3)即可得到两相导通时的电机模型。
当两相导通时,电流从相流到相,为负值。因电机三相绕组对称,可用此方法建立两相导通时的仿真模型,运行时根据位置信号来切换各个模型即可。
换相逻辑模块的主要作用是根据电机转子位置来决定让哪个绕组通电,从而给这两相加上相应的电压。本文采用M函数,根据电机输出的转子位置电角度来选择让哪两相的电机模型通电,从而模拟电机运行时三相绕组的通电、断电。
2 机械运动模块
机械运动模块中,模块输入为总的电磁功率,通过加乘模块即可求得电磁转矩信号,最后得到电机转速信号。
3 电流控制模快
考虑到电机换向时电流有脉动,所以选取三相电流中绝对值最大的一个作为反馈电流。电流控制模块的结构较为简单,电流调节采用传统的PI调节,电流误差信号经过PI调节后限幅输出得到电机的输入电压。
4 仿真结果
仿真用的电机模型参数为:星型连接,额定电压,额定转速,定子相绕组自感,转动惯量。进行无刷直流电机双闭环控制仿真,其中电流PI环节中得到电机转速的仿真结果,如图2所示。

图2 转速仿真结果
另外,给出无刷直流电机双闭环控制仿真中得到动态电磁转矩、相电流波形,如图3所示。
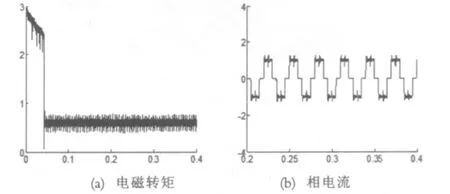
图3 电磁转矩和电流的仿真结果
在仿真实验过程发现,电流环中的PI控制器参数、对系统也有影响,应适当选择这2个参数以获得最佳的PI控制特性。通过仿真结果,可以发现,本文的无刷直流电机控制系统的响应速度快、调节精度高、稳态性能好,实现了建模仿真的效果。
猜你喜欢
大电机技术(2022年5期)2022-11-17
四川冶金(2018年1期)2018-09-25
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年3期)2015-03-01
电机与控制应用(2015年1期)2015-03-01
