
兆瓦级风机直流和交流电动变桨距技术
2011-04-12 08:18汪海波
电力工程技术 2011年4期
汪海波,田 炜,鲁 斌,刘 剑
(国网电力科学研究院,江苏南京210003)
由于全球范围内煤炭、石油等化石能源日渐减少,以及以煤炭为主要能源的电力行业带来的环境污染问题,世界各国都将目光转移到了可再生、清洁能源的研究、开发和利用上。风力发电是近年来发展最快、具备大规模开发利用的绿色能源之一[1,2]。目前风力发电机组正朝着大型化、变桨距和变速恒频的方向不断发展,变速恒频MW级风电机组已经成为国际风力发电市场的主流产品。
变桨距机构是变速恒频风电机组的核心部件之一。变桨距是指借助控制技术和动力系统,改变安装在大型风力发电机轮毂上的叶片的桨距角大小,从而改变叶片的气动特性,使桨叶和整机的受力状况大为改善,在紧急情况下还可以实现气动刹车的功能。国外大型风力发电机组尤其是MW级以上的风电机组一般采用电动变桨距控制技术。我国风力发电事业正处于快速发展阶段,MW级风电机组的电动变桨距控制系统尚处于试验、改进阶段。结合国内外MW级风力发电机组的发展现状,对MW级风电机组的电动变桨距系统进行简要分析。
1 变桨距系统概述
1.1 风机的2种变桨距机构
根据变桨执行机构的动力形式不同,大型MW级风电机组变桨距系统的驱动方式主要有液压和电动2种方式[3]。液压执行机构具有转矩大、无需变速机构且技术成熟等优点,Vestas,Gamesa等公司的风力发电机采用了液压变桨距技术[4]。但液压传动结构复杂,存在泄漏、渗油的隐患,且液压油受温度影响大,影响液压的刚度、液压阻尼比等。近年来,随着电力电子技术、电机设计和控制理论等的发展,电动执行机构以适应能力强、响应快、精度高、结构简单、无泄漏、无污染和维护方便等优点得到了广泛的应用,GE Wind,Enercon,Repower,Nordex 等公司的风力发电机都是采用了电动变桨技术[4]。
1.2 风机变桨的工作原理
变桨距调节型风力发电机组是指通过变桨驱动装置,带动安装在轮毂上的叶片转动,改变叶片桨距角的大小,从而改变风力发电机组获得的空气动力转矩。其工作过程为:当风电机组达到运行条件时,控制系统命令变桨系统将叶片桨距角调到一定的角度,当风轮转速达到一定时,再将叶片桨距角调节到0°附近,直到风力机达到额定转速并网发电;在运行过程中,当风速低于额定风速时,发电机输出功率小于额定功率,桨距角保持位置不变,不作任何调节;当风速超过额定风速时,发电机输出功率超过额定功率,系统根据输出功率的变化调整叶片桨距角的大小,使发电机的输出功率保持在额定功率,保证风力发电机安全、稳定的工作。
2 电动变桨距系统
目前,大型风电机组普遍采用具有独立变桨驱动系统的三桨叶结构[5]。电动变桨距系统由3套独立的变桨装置组成,变桨系统如图1所示,图1中只给出一个桨叶的变桨执行机构,其他2个桨叶与此相同。变桨系统由控制器、伺服电机、伺服电机驱动器、后备电源、制动电阻、减速机构、电机编码器、叶片角度编码器以及限位开关等部分组成。其中后备电源可以采用铅酸蓄电池串联或超级电容串并联来实现。当变桨系统收到来自主控变桨命令时,伺服电动机带动减速机构的输出轴小齿轮旋转,小齿轮与桨叶回转支承的内环相啮合,从而带动回转支承的内环与叶片一起旋转,实现了改变叶片桨距角的目的。根据电机编码器与叶片角度编码器的角度反馈值实现桨距角的闭环控制,从而完成3个桨叶的定位和同步控制。
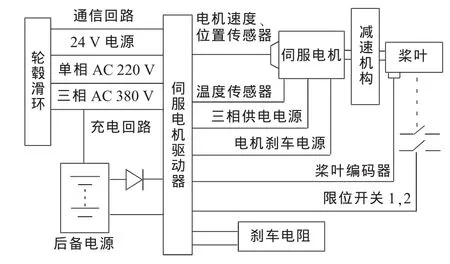
图1 电动变桨系统
目前应用于风电机组的电动变桨距系统方案主要有直流伺服电机驱动与交流伺服电机驱动2种方案。采用直流电机方案时,图1所示的伺服电机驱动器与伺服电机分别为直流伺服驱动器和直流伺服电机;采用交流电机方案时,伺服电机驱动器与伺服电机分别为交流伺服驱动器和交流伺服电机。
2.1 直流电动变桨
电动变桨距系统采用直流伺服电机方案时,采用的直流伺服电机主要有串激直流电机与永磁直流电机2种。
串激直流电机的励磁绕组与定子电枢绕组之间通过电刷和换向器相串联,励磁电流与电枢电流相同,它的原理如图2所示。
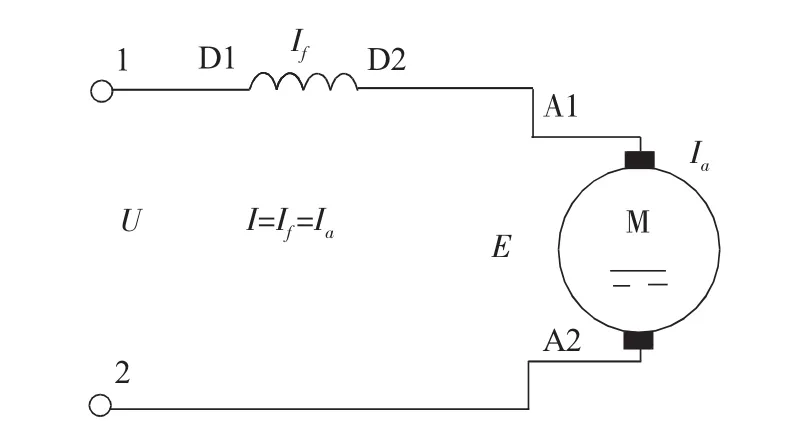
图2 串激直流电机原理图
其数学模型如下:

式中:K1,K2为系数;T为输出扭矩;n为速度。 由式(1)可得:
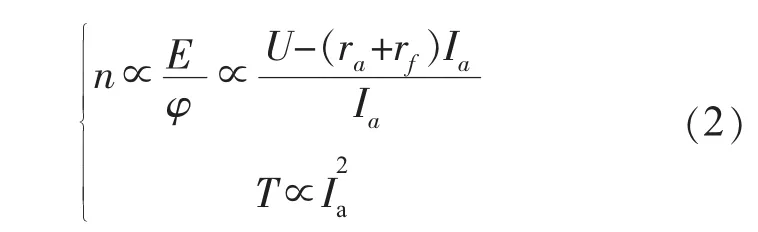
由式(1,2)可以看出串激电机定子的磁通量随着励磁电流的增大而增大,转矩近似与电枢电流的平方成正比,在电压不变的情况下,转速随转矩或电流的增加而迅速下降。串激直流电机适合应用在大转矩应用场合,但是电机的转速变化率大,速度得不到精确的控制[6]。采用直流串激电机方案的电动变桨系统得到了较为一定的应用,其中SSB,MOOG2大公司的电动变桨产品中都有此种方案。
由于电枢和励磁回路串联,2个绕组中电流方向相同,不能用改变电流方向的方法来进行电机制动或反向运行。电机的正向制动或改变电机运行方向,电枢绕组或串励绕组的极性必须反向。可以通过在串励绕组中使用整流桥,改变电枢与励磁绕组的电流方向,来实现电机机械的四象限运行。增加整流装置后的原理如图3所示,通过电枢绕组或串励绕组的极性反向改变电机运行方向的原理如下:当电源输入为上正下负时,电枢、励磁电流流向分别为IA1-A2,ID1-D2;当电源输入变为上负下正时,电枢、励磁电流流向分别为IA2-A1,ID1-D2,其中电源端子1,2接直流伺服驱动器的输出。

图3 串激直流电机原理图
永磁直流电机由永磁体代替电励磁,无换向器和电刷,其数学模型简单。永磁直流电机的电压与速度关系曲线线性度好,电流与转矩成线性关系。永磁直流电机的正反向运行只需改变电枢绕组施加电压的极性。由于定子磁场是恒定的,所以这类电机对电压变化的响应非常快。
直流电机的工作电压等级相对较低,在电动变桨距系统采用直流电机的方案中,在出现进线主电源掉电和直流伺服驱动器故障的情况下,可以通过后备电源的接入实现顺桨,并通过触发限位开关实现电源的切断。但是直流电机存在结构复杂、体积重量大、维护难的问题。
2.2 交流电动变桨
随着电力电子技术、微处理器、电机控制技术的迅速发展,以交流伺服电机为执行电动机的交流伺服系统具有可与直流伺服系统相媲美的性能,并能够充分发挥交流电动机的优势,现代伺服系统驱动控制也逐渐朝着交流伺服电机驱动控制的方向发展。电动变桨距系统采用交流伺服电机方案时,采用的交流伺服电机主要有感应异步电机与永磁同步电机(PMSM)2种。
感应异步电动机制造容易,价格低廉,不需要特殊维护。但电机运行时转子发热比较严重,同时转子电阻随温度而变化将影响磁场定向的准确性。PMSM采用永磁体代替普通同步电机的励磁绕组,从而省去了励磁线圈、滑环及电刷。PMSM的定子结构与普通的感应电机相同,由三相绕组及铁芯构成。与感应电动机相比,PMSM不需要励磁电流,可以显著提高功率因数,而且在稳定运行时没有转子电阻损耗[6]。以二极式PMSM为例,PMSM的等效结构坐标图如图4所示。

图4 永磁同步电机等效结构图
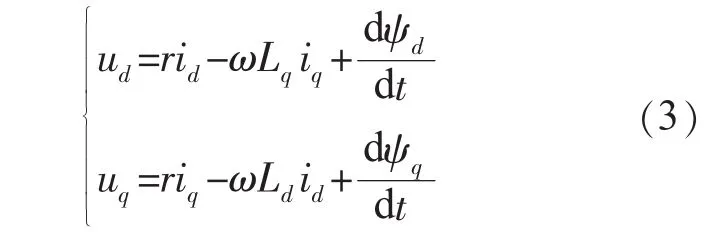
在交流电机的矢量控制中,建立在d-q坐标系下的PMSM数学模型[7],其电压方程:
磁链方程:

对于表面式永磁同步电机,Ld=Lq=L,所以PMSM转矩方程:

机械运动方程:

以上各式中的 ud,uq,id,iq分别为 d-q 轴的电压和电流;Ld,Lq分别为 d-q轴电感;r为定子电阻;P为电机的极对数;ψf为永磁体与定子交链的磁链;Te为电磁转矩;TL为负载转矩;J为转动惯量;ω为转子电角速度。由式(5)可见,在PMSM矢量控制中,只要能很好地控制定子电流的励磁电流分量id,保持d轴磁链ψd幅值恒定,则转矩只受定子电流的转矩电流分量iq控制,电机的电磁转矩与转矩电流分量iq成正比。通过这样的矢量控制,PMSM就能获得与直流电动机调压调速近似的性能。
常用的交流电机工作电压相对较高,在后备电源的选择上比采用直流电机方案难度大,可以采用特殊设计的低压大电流交流伺服电机。相比直流伺服电机,交流伺服电机具有体积小、重量轻、结构简单、大转矩输出等优点。
2.3 2种方案比较
(1)和直流伺服电机相比,交流伺服电机具有体积小、重量轻、结构简单、功率密度大、维护方便等优点。随着风力发电机单机容量的持续增大,对电动变桨距系统的容量提出了更高的要求,采用交流电机具有一定的优势。(2)和交流伺服系统相比,在伺服电机驱动器出现故障时,直流伺服电机的电枢两端接入后备电源后可以完成顺桨动作,保证风力发电机3个桨叶的有效顺桨。交流伺服驱动器一旦出现故障,与之相连的交流电机不能通过接入后备电源的方式完成对桨叶的顺桨工作。所以伺服驱动器故障的情况下,采用直流电机的方案有一定的优势,但是3套伺服驱动器同时坏掉的机率较小,应从整体上统一考虑。(3)直流伺服电机的数学模型简单,其电枢电压与速度、转矩与电流的线性度较好,运动控制相对简单,目前直流伺服驱动器电路较多的采用H桥式拓扑。交流伺服电机内部电磁关系复杂,但是通过现代电机控制理论来驱动交流伺服电机,能够实现比直流伺服系统性能更佳的交流伺服系统。交流伺服驱动器的电路须采用三相全桥的拓扑结构。
综上所述,交流伺服系统在具有直流伺服系统众多优点的基础上,还在价格成本、运行稳定性、可维护性等诸多方面具有相当的优势。随着全球风电技术的迅猛发展,风力发电机单机容量的持续增大,风电机组对电动变桨距系统的容量、可靠性等方面提出了更高的要求。相比直流伺服系统,电动变桨距系统采用交流伺服系统作为其执行机构具有较大的优势。
3 结束语
电动变桨系统具有造价低廉、适用性广、结构简单和便于维护的优点,为绝大多数风机制造商所广泛采用,电动变桨技术已经成为风力发电机变桨技术的主流。随着风力发电机组单机容量的不断增大,电动变桨距系统采用交流伺服电机的方案将是一种趋势。
[1]李 晶,方 勇,宋家骅,等.中外常用风力发电技术及风电机概述 [J].电气技术,2009(8):79-82.
[2]沙 非,马成康,刘 闯,等.变速恒频风力发电系统及其控制技术研究 [J].电网与清洁能源,2009,25(1):44-47.
[3]任丽蓉.兆瓦级风力发电机组电动变桨距系统研究[D].重庆:重庆大学,2009.
[4]刘晓林.浅谈风力发电机组的液压和电动变桨系统[J].电气应用,2009,28(15):70-73.
[5]惠 晶,顾 鑫,杨元侃.兆瓦级风力发电机组电动变桨距系统 [J].电机与控制应用,2007,34(11):51-54.
[6]姜飞龙.永磁同步电机伺服系统控制研究[D].杭州:浙江大学,2006.
[7]黄佳佳.滑模控制永磁同步电机伺服系统的研究[D].南京:南京航空航天大学,2007.
猜你喜欢
大电机技术(2022年5期)2022-11-17
微特电机(2020年11期)2020-12-30
通信电源技术(2020年17期)2020-12-28
哈尔滨轴承(2020年1期)2020-11-03
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
电子制作(2017年1期)2017-05-17
工业设计(2016年6期)2016-04-17
通信电源技术(2016年1期)2016-04-16
淮南师范学院学报(2015年3期)2015-03-22
